

前言:什么是目标检测?
在日常生活中,我们经常需要让计算机"看懂"图像——不仅仅是知道图像里有什么,还要知道这些东西在什么位置。这就是目标检测(Object Detection) 的任务:在图像中找出感兴趣的目标(物体),并确定它们的位置和类别。
想象一下,如果你正在教一个小朋友认识动物:不仅要告诉他"这是狗",还要用手指着狗的位置。目标检测算法做的就是类似的事情!
一、目标检测算法的发展历程
在深度学习时代,目标检测算法核心分为两个流派:
- 两阶段(Two-Stage)途径:先产生候选区域,再对候选区域进行分类和微调。R-CNN系列就是这类途径的代表。
- 单阶段(One-Stage)技巧:直接在图像上进行密集预测,一步到位这类方法的代表就是地输出目标类别和位置。YOLO和SSD。
今天我们要重点介绍的是Faster R-CNN许多检测任务的基础。为了更好地理解Faster R-CNN,大家先来看看它的"前辈们"。就是,它是两阶段办法的杰出代表,也
二、R-CNN:开创性的工作
2.1 R-CNN的工作原理
R-CNN(Region-based Convolutional Neural Networks) 于2014年提出,是第一个成功将深度学习应用于目标检测的算法。它的工作流程分为三个步骤:
- 区域提议(Region Proposal):使用选择性搜索(Selective Search) 算法从图像中提取约2000个可能包含物体的候选区域。
- 特征提取:将每个候选区域缩放(warp) 成固定大小(如227×227),然后输入到CNN(如AlexNet)中提取特征。
- 分类与回归:使用SVM对提取的特征进行分类,判断候选区域中的物体类别;同时使用边界框回归(Bounding Box Regression) 精细调整候选框的位置。
2.2 R-CNN的局限性
尽管R-CNN在当时取得了突破性的性能,但它存在几个明显缺点:
- 训练测试速度慢:需要为每个候选区域单独进行CNN前向传播,处理一张图像约需47秒。
- 训练阶段多:需要经过CNN微调、SVM训练和边界框回归三个独立阶段,流程复杂。
- 内存占用大:需要将大量特征文档保存到磁盘上(数百GB)。
三、Fast R-CNN:速度的提升
为了解除R-CNN的效率障碍,Fast R-CNN在2015年被提出。
3.1 重要改进
Fast R-CNN的核心改进在于:
- 共享卷积计算:不再对每个候选区域单独进行CNN前向传播,而是整个图像只凭借CNN一次,生成共享的特征图。
- ROI Pooling:引入感兴趣区域池化(Region of Interest Pooling) 层,从共享特征图中提取固定大小的特征向量给每个候选区域。
- 端到端训练:将分类和边界框回归任务合并到一个网络中,使用多任务损失函数进行联合训练。
3.2 仍然存在的不足
Fast R-CNN纵然大大提升了速度,但仍然依赖外部的区域提议算法(如Selective Search),这部分不仅速度慢,而且无法针对特定任务进行优化。
四、Faster R-CNN:真正意义上的端到端检测
2015年,Faster R-CNN的出现彻底解决了区域提议的瓶颈问题,实现了真正的端到端目标检测。
4.1 核心创新:区域提议网络(RPN)
Faster R-CNN最重要的创新是引入了区域提议网络(Region Proposal Network, RPN),它直接从特征图中生成高质量的区域提议,取代了传统的选择性搜索等外部方法。
4.2 Anchor机制
RPN引入了一个重要概念——Anchor(锚点)预先定义在特征图每个位置上的就是。Anchor一组参考框,具有不同的尺度和长宽比。
4.3 Faster R-CNN工作流程
Faster R-CNN工作流程图:
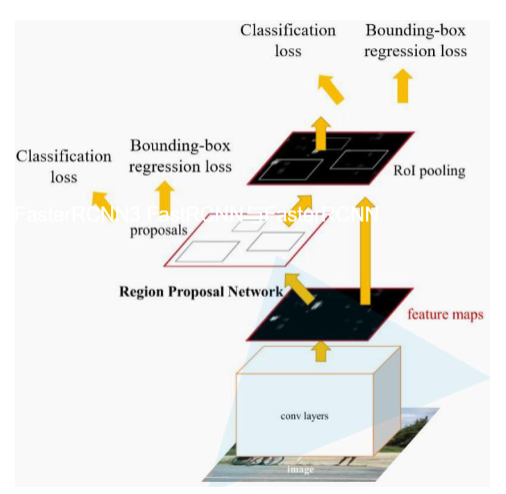
Faster R-CNN的工作流程可以分为以下步骤:
- 特征提取:输入图像起初通过CNN(如VGG16或ResNet)生成特征图。
- 区域提议:特征图输入RPN,生成区域提议。
- ROI Pooling:将RPN生成的区域提议映射到特征图上,并利用ROI Pooling层转换为固定大小的特征。
- 分类与回归:最后通过全连接层同时完毕目标分类和边界框回归。
4.4 RPN的详细原理
RPN的本质是一个全卷积网络,它在特征图上滑动一个小窗口(通常为3×3),为每个位置预测:
- 目标得分(Objectness Score):判断Anchor是否包括目标(二分类:前景/背景)
- 边界框调整值:预测如何调整Anchor使其更贴合真实目标
RPN应用一种巧妙的训练方式:根据Anchor与真实框的交并比(IoU) 来决定正负样本:
- 正样本:与真实框IoU > 0.7,或与某个真实框有最高IoU的Anchor
- 负样本:与所有真实框IoU < 0.3的Anchor
- 忽略:IoU在0.3到0.7之间的Anchor不参与训练
五、R-CNN系列算法对比
下表总结了R-CNN、Fast R-CNN和Faster R-CNN的主要特点:
特性 | R-CNN | Fast R-CNN | Faster R-CNN |
|---|---|---|---|
发布年份 | 2014 | 2015 | 2015 |
区域提议途径 | 选择性搜索 | 选择性搜索 | RPN(区域提议网络) |
特征提取 | 每个区域独立通过CNN | 整个图像借助CNN一次 | 整个图像通过CNN一次 |
速度 | 慢(47秒/图像) | 中等(2秒/图像) | 快(0.2秒/图像) |
训练方式 | 多阶段训练 | 单阶段多任务训练 | 端到端训练 |
准确性 | 较高 | 高 | 更高 |
内存使用 | 高(数百GB) | 较低 | 低 |
六、Faster R-CNN的扩展:Mask R-CNN
2017年,何恺明等人基于Faster R-CNN提出了Mask R-CNN,主要增加了实例分割功能:
- 添加分割分支:在原有分类和边界框回归基础上,增加了一个掩码预测分支
- ROI Align:替换了ROI Pooling,应用双线性插值保持空间位置准确性,解决了像素级对齐问题
Mask R-CNN不仅能够检测物体,还能生成每个物体的精确像素级掩码,是实例分割领域的里程碑工作。
七、总结
目标检测领域的一个重要里程碑,它通过引入就是Faster R-CNN区域提议网络(RPN) 实现了真正意义上的端到端训练,同时保持了高精度。
虽然如今有许多更快的检测算法(如YOLO系列),但Faster R-CNN的设计思想仍然影响着许多后续工作,其在精度要求高的场景中(如医学图像分析、卫星图像解读等)仍有广泛应用。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号