

博主介绍:✌全网粉丝10W+,前互联网大厂软件研发、集结硕博英豪成立工作室。专注于计算机相关专业项目实战6年之久,选择我们就是选择放心、选择安心毕业✌
> 想要获取完整文章或者源码,或者代做,拉到文章底部即可与我联系了。通过感兴趣的可以先收藏起来,点赞、关注不迷路,大家在毕设选题,项目以及论文编写等相关障碍都能够给我留言咨询,希望帮助同学们顺利毕业 。
1、毕业设计:2026年计算机专业毕业设计选题汇总(建议收藏)✅
2、大数据毕业设计:2026年选题大全 深度学习 python语言 JAVA语言 hadoop和spark(建议收藏)✅
1、计划介绍
技术栈:
Python语言、深度学习、YOLO模型、pyqt界面
可以检测是否是二维码+定位+二维码内容识别,允许运用任意一款微信小程序来生成二维码
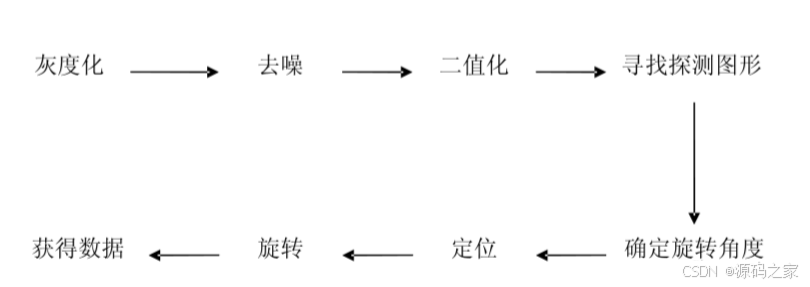
2.1 二维码的识别流程
开始, 对采集的彩色图像进行灰度化, 以提高后继的运行速度。
其次, 去除噪声。 采用十字形中值滤波去除噪音对二码图像的干扰主要是盐粒噪声。
利用灰度直方图应用, 使用迭代法选取适当的阈值, 对二维码进行二值化处理,灰度化 去噪 二值化 寻找探测图形确定旋转角度 定位 旋转
获得数据使其变为白底黑色条码。
最后, 确定二维码的位置探测图形, 对条码进行定位, 旋转至水平后, 获得条码数据,以便下一步进行解码。
2、项目界面
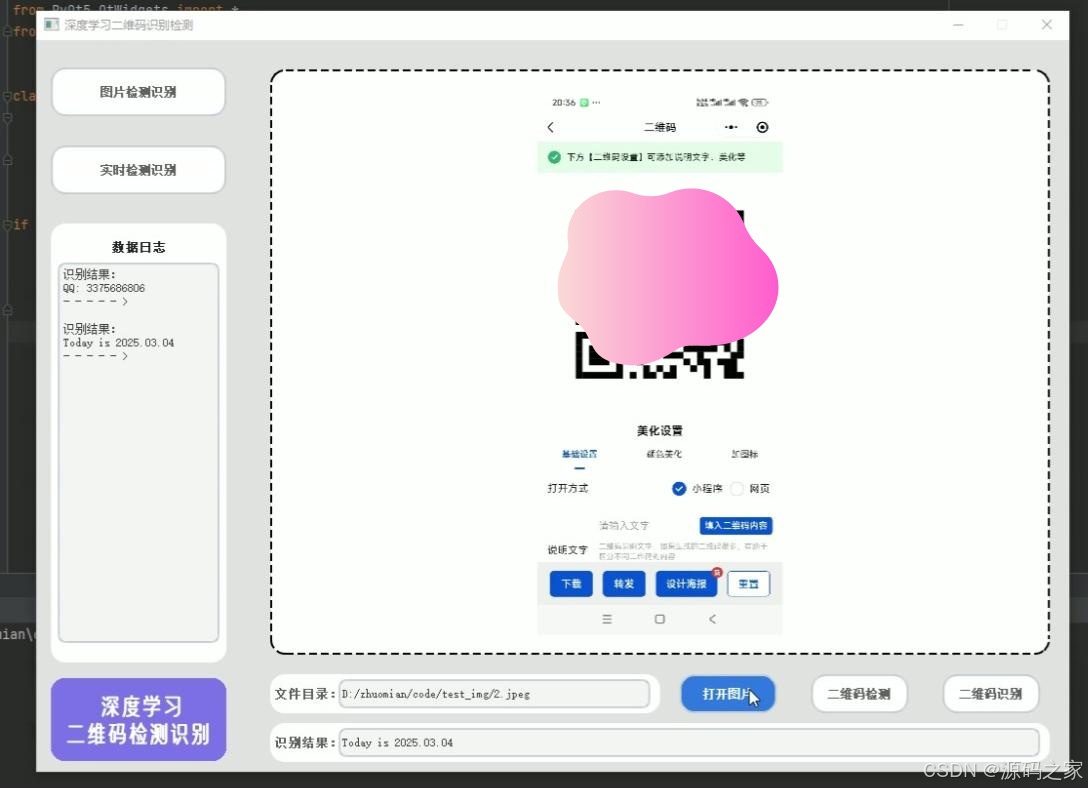
(1)上传二维码图片进行检测识别,左侧会显示检测识别结果
(2)上传二维码图片进行检测识别,左侧会显示检测识别结果,左侧识别结果:today is 2025.03.04
(3)打开摄像头进行实时检测识别,左侧会表现检测识别结果
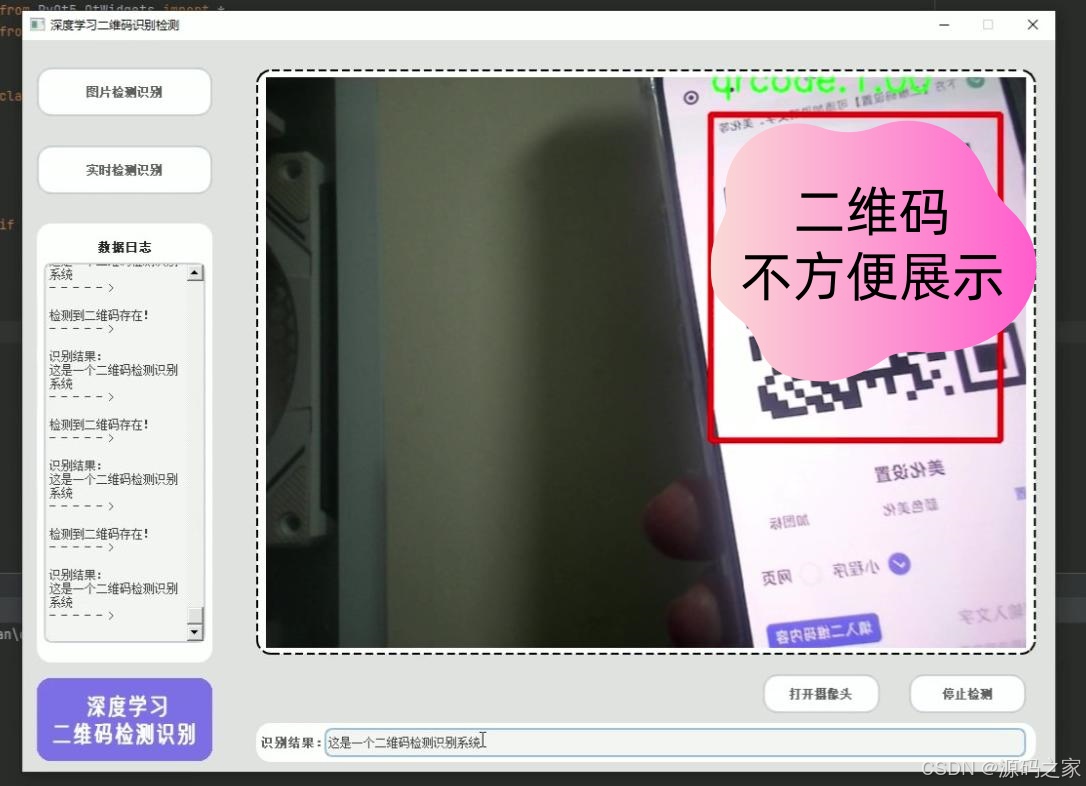
(4)打开摄像头进行实时检测识别,左侧会显示检测识别结果

3、项目说明
1.1 二维码介绍
用某种特定的几何图形按一定规律在平面(二维方向上)分布的、黑白相间的、记录数据符号信息的图形;在代码编制上巧妙地利用构成计算机内部逻辑基础的“0”、“1”比特流的概念,运用若干个与二进制相对应的几何形体来表示文字数值信息,通过图象输入设备或光电扫描设备自动识读以实现信息自动处理:它具有条码技术的一些共性:每种码制有其特定的字符集;每个字符占有一定的宽度;具有一定的校验功能等。同时还具有对不同行的信息自动识别功能、及处理图形旋转变化点。就是二维条码/二维码
1.2 QRCode
常见的二维码为QR Code,QR全称Quick Response,是一个近几年来移动设备上超流行的一种编码方式,它比传统的Bar
Code条形码能存更多的信息,也能表示更多的数据类型。
基于 Python 与 YOLO 模型的二维码检测识别系统介绍
该项目是一款聚焦二维码全流程处理的桌面应用,以 Python 为开发核心,融合深度学习 YOLO 模型的检测能力与 PyQt 的可视化界面,实现二维码 “检测定位 - 内容识别” 双功能,帮助静态图片上传与摄像头实时识别,可适配日常扫码、信息核验等场景,操作便捷且识别效率高,同时兼容微信小代码生成的常见 QR Code 二维码。
技术栈选择紧扣 “功能需求 - 用户体验”:Python 作为基础语言,凭借丰富的图像处理库(如 OpenCV)与 YOLO 模型调用接口,为识别流程提供灵活支撑;YOLO 模型是核心检测工具 —— 相较于传统检测算法,YOLO 具备 “实时性强、定位精准” 优势,能快速从图像中锁定二维码位置,适配静态与动态(摄像头)场景;PyQt 则构建友好操作界面,替代代码式操作,让非技术用户经过点击按钮即可完成上传、检测、查看结果等操作,降低使用门槛。
项目核心竞争力在于标准化的二维码识别流程,保障识别准确性:第一步灰度化处理,将彩色图像转为灰度图,减少色彩通道数据量,显著提升后续处理速度;第二步去噪优化,采用十字形中值滤波,针对性消除盐粒噪声(二维码常见干扰),避免噪声影响二维码轮廓识别;第三步二值化处理,通过迭代法自动选取阈值,将灰度图转为 “白底黑码” 的二元图像,突出二维码条码特征;最后定位与解码,通过识别二维码的位置探测图形确定其位置与旋转角度,调整至水平后提取条码材料,完成内容解码,整个流程层层递进,有效应对复杂图像环境。
体系功能与界面设计高度匹配用户需求,覆盖两类核心场景:其一为静态图片识别(对应界面 1、2),用户点击 “上传图片” 选择本地二维码(可由微信小应用生成),系统处理后在左侧实时显示结果 —— 如界面 2 中成功识别出 “today is 2025.03.04”,结果直观清晰;其二为摄像头实时识别(对应界面 3、4),用户点击 “打开摄像头”,系统调用设备摄像头捕捉实时画面,同步检测画面中的二维码并在左侧输出识别内容,适配动态扫码场景(如商品码、场景码实时读取)。
任务还充分考虑二维码特性,针对常见的 QR Code(Quick Response)优化 ——QR Code 存储信息量大、支持多种数据类型,系统解码模块可精准解析其承载的文本、链接等内容,适配日常多数二维码应用场景。综上,该系统以 “技术落地性” 为核心,通过清晰的识别流程、易用的界面与全面的特性,成为一款兼顾效率与体验的二维码处理工具。
4、核心代码
import argparse
import os
import sys
from pathlib import Path
import cv2
import torch
import torch.backends.cudnn as cudnn
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from models.common import DetectMultiBackend
from utils.datasets import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
from utils.general import (LOGGER, check_file, check_img_size, check_imshow, check_requirements, colorstr,
increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
from utils.plots import Annotator, colors, save_one_box
from utils.torch_utils import select_device, time_sync
@torch.no_grad()
def run(weights=ROOT / 'yolov3.pt', # model.pt path(s)
source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
imgsz=640, # inference size (pixels)
conf_thres=0.25, # confidence threshold
iou_thres=0.45, # NMS IOU threshold
max_det=1000, # maximum detections per image
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
view_img=False, # show results
save_txt=False, # save results to *.txt
save_conf=False, # save confidences in --save-txt labels
save_crop=False, # save cropped prediction boxes
nosave=False, # do not save images/videos
classes=None, # filter by class: --class 0, or --class 0 2 3
agnostic_nms=False, # class-agnostic NMS
augment=False, # augmented inference
visualize=False, # visualize features
update=False, # update all models
project=ROOT / 'runs/detect', # save results to project/name
name='exp', # save results to project/name
exist_ok=False, # existing project/name ok, do not increment
line_thickness=3, # bounding box thickness (pixels)
hide_labels=False, # hide labels
hide_conf=False, # hide confidences
half=False, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
):
source = str(source)
save_img = not nosave and not source.endswith('.txt') # save inference images
is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
if is_url and is_file:
source = check_file(source) # download
# Directories
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
device = select_device(device)
model = DetectMultiBackend(weights, device=device, dnn=dnn)
stride, names, pt, jit, onnx = model.stride, model.names, model.pt, model.jit, model.onnx
imgsz = check_img_size(imgsz, s=stride) # check image size
# Half
half &= pt and device.type != 'cpu' # half precision only supported by PyTorch on CUDA
if pt:
model.model.half() if half else model.model.float()
# Dataloader
if webcam:
view_img = check_imshow()
cudnn.benchmark = True # set True to speed up constant image size inference
dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt and not jit)
bs = len(dataset) # batch_size
else:
dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt and not jit)
bs = 1 # batch_size
vid_path, vid_writer = [None] * bs, [None] * bs
# Run inference
if pt and device.type != 'cpu':
model(torch.zeros(1, 3, *imgsz).to(device).type_as(next(model.model.parameters()))) # warmup
dt, seen = [0.0, 0.0, 0.0], 0
for path, im, im0s, vid_cap, s in dataset:
t1 = time_sync()
im = torch.from_numpy(im).to(device)
im = im.half() if half else im.float() # uint8 to fp16/32
im /= 255 # 0 - 255 to 0.0 - 1.0
if len(im.shape) == 3:
im = im[None] # expand for batch dim
t2 = time_sync()
dt[0] += t2 - t1
# Inference
visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
pred = model(im, augment=augment, visualize=visualize)
t3 = time_sync()
dt[1] += t3 - t2
# NMS
pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
dt[2] += time_sync() - t3
# Second-stage classifier (optional)
# pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
# Process predictions
for i, det in enumerate(pred): # per image
seen += 1
if webcam: # batch_size >= 1
p, im0, frame = path[i], im0s[i].copy(), dataset.count
s += f'{i}: '
else:
p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
p = Path(p) # to Path
save_path = str(save_dir / p.name) # im.jpg
txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
s += '%gx%g ' % im.shape[2:] # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
imc = im0.copy() if save_crop else im0 # for save_crop
annotator = Annotator(im0, line_width=line_thickness, example=str(names))
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
# Write results
for *xyxy, conf, cls in reversed(det):
if save_txt: # Write to file
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
with open(txt_path + '.txt', 'a') as f:
f.write(('%g ' * len(line)).rstrip() % line + '\n')
if save_img or save_crop or view_img: # Add bbox to image
c = int(cls) # integer class
label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
annotator.box_label(xyxy, label, color=colors(c, True))
if save_crop:
save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
# Print time (inference-only)
LOGGER.info(f'{s}Done. ({t3 - t2:.3f}s)')
# Stream results
im0 = annotator.result()
if view_img:
cv2.imshow(str(p), im0)
cv2.waitKey(1) # 1 millisecond
# Save results (image with detections)
if save_img:
if dataset.mode == 'image':
cv2.imwrite(save_path, im0)
else: # 'video' or 'stream'
if vid_path[i] != save_path: # new video
vid_path[i] = save_path
if isinstance(vid_writer[i], cv2.VideoWriter):
vid_writer[i].release() # release previous video writer
if vid_cap: # video
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
else: # stream
fps, w, h = 30, im0.shape[1], im0.shape[0]
save_path += '.mp4'
vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
vid_writer[i].write(im0)
# Print results
t = tuple(x / seen * 1E3 for x in dt) # speeds per image
LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
if save_txt or save_img:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
if update:
strip_optimizer(weights) # update model (to fix SourceChangeWarning)
def main(opt):
check_requirements(exclude=('tensorboard', 'thop'))
run(**vars(opt))
if __name__ == "__main__":
opt = parse_opt()
main(opt)5、源码获取方式
由于篇幅限制,获取完整文章或源码、代做项目的,查看我的【用户名】、【专栏名称】、【顶部选题链接】就可以找到我啦
感兴趣的可以先收藏起来,点赞、关注不迷路,下方查看获取联系方式


 浙公网安备 33010602011771号
浙公网安备 33010602011771号