


非线性规划、最优控制与多目标优化
一、非线性规划(Nonlinear Programming,NLP)
1、线性规划LP:运筹学中,对于资源分配、计划调度等问题,有数学公式可以求解,数学公式的目标函数与所有约束条件均为线性

2、非线性函数:二次函数、指数函数、三角函数等
3、非线性规划NLP,研究目标函数或者约束条件,至少有一个为非线性函数的优化问题,更贴近实际复杂系统
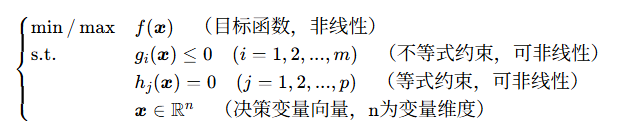
4、NLP三要素:
决策变量
目标函数
约束条件
5、NLP的求解思想是迭代优化,通过逐步更i性能决策变量x,使目标函数逼近最优值
6、NLP应用场景:
a.神经网络的参数优化(目标:最小化损失函数,约束:参数范围)
b.多车轨迹规划:核心是在满足约束的前提下,通过优化目标函数实现高效协同
二、最优控制(Optimal Control)
1、是NLP在动态系统中的延申,研究动态系统在时间维度上的最优决策
2、核心是找到控制策略,使系统从初始状态到目标状态时,某一性能指标最优(时间、误差等指标)
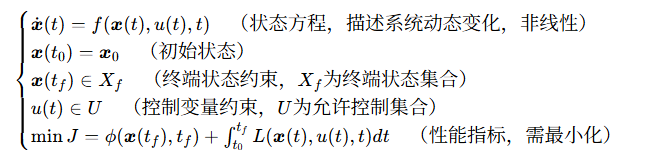
3、求解方法:结合变分法和动态规划,将无限维控制函数的优化,转化为有限维问题
4、应用:自动驾驶车辆的最优轨迹规划(目标:最小化行驶时间,约束:不超速、不碰撞)
三、多目标优化(Multi-Objective Optimization, MOO)
研究存在多个相互冲突的目标函数时的优化问题,核心是找到帕累托最优解,而不是唯一最优解
四、三者之间的关联
1、NLP是基础工具,静态+非线性
2、最优化控制使NLP的动态延申,目标最优+约束可行
3、多目标优化,是NLP和最优控制的目标扩展
4、三者结合,可解决工程中最复杂的优化问题,是自动驾驶的核心技术支撑

 浙公网安备 33010602011771号
浙公网安备 33010602011771号