

基于图像三维重建学习笔记
1. 编译报错
在对应的文件task5_test_fundamental_ransac.cc中添加
#include <cassert>
解决!
2. 使用Eigen实现针孔相机模型投影变换
 View Code
View Code
3. 使用读文件getline,这边的line、stream是这一行的数据,>>表示以空格为分隔,读取一个字符串
/* 加载数据 */ std::ifstream in(file_name); assert(in.is_open()); std::string line, word; // 加载相机参数 { int n_cams = 0; getline(in, line); std::stringstream stream(line); stream >> word >> n_cams; cams.resize(n_cams); for (int i = 0; i < cams.size(); i++) { getline(in, line); std::stringstream stream(line); stream >> cams[i].focal_length; stream >> cams[i].distortion[0] >> cams[i].distortion[1]; for (int j = 0; j < 3; j++)stream >> cams[i].translation[j]; for (int j = 0; j < 9; j++)stream >> cams[i].rotation[j]; } }
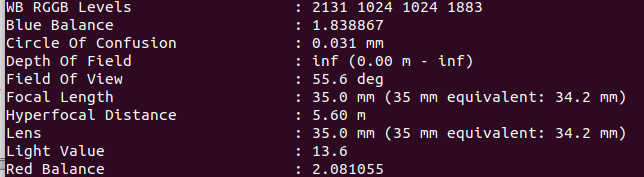
4. 使用小工具exiftool,获取焦距
安装: sudo apt-get install exiftool
使用: exiftool ./ImageBasedModellingEdu/examples/data/sequence/IMG_0191.JPG
结果:Focal Length即为焦距

 浙公网安备 33010602011771号
浙公网安备 33010602011771号