

VIO第二章作业
一、kalibr_allan标定
1.安装matlab、ROS等
2.编译功能包vio_data_simulation
3.执行,生成数据imu.bag
rosrun vio_data_simulation vio_data_simulation_node
4.下载kaliibr_allan功能包并进行编译
git clone https://github.com/rpng/kalibr_allan.git
5.使用bagconver将bag转成mat文件(注意这里最后一个参数为话题名,用rosbag info查看)
rosbag info imu.bag
rosrun bagconvert bagconvert imu.bag imu
6.打开matlab,注意sudo
sudo matlab
7.执行SCRIPT_allan_matparallel.m,注意要修改mat文件的路径;执行之后会生成一个新的mat;下面用SCRIPT_process_results.m来操作这个mat(也要注意修改文件位置),这样便计算出误差,并且绘画出allan曲线
8.结果
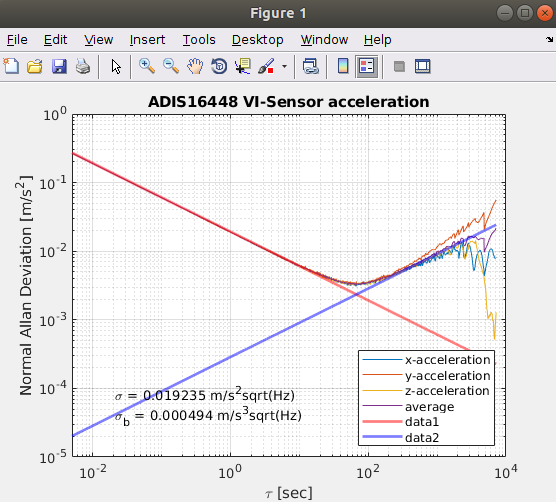
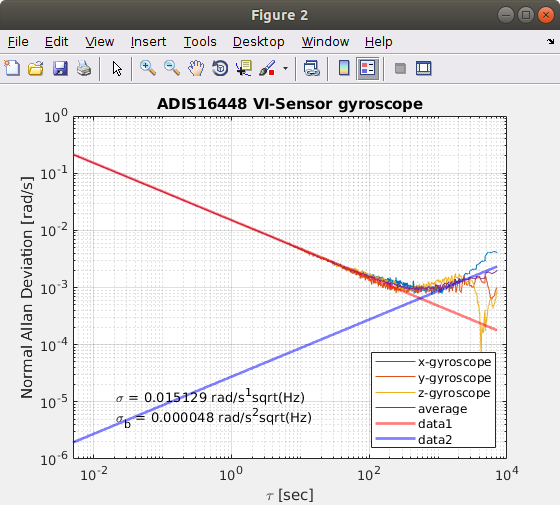
与param.h中设定的值对比,十分接近,因此标定是成功的。
二、中值积分代替欧拉积分
这里用的是老师给的另外一个包,因为给的python绘图工具已经匹配好了。过程为:
cd vio_data_simulation-master mkdir build cd build cmake .. make cd ../bin ./data_gen cd ../python_tool python draw_trajcory.py
将imu.cpp中的欧拉法代码:
MotionData imupose = imudata[i]; //delta_q = [1 , 1/2 * thetax , 1/2 * theta_y, 1/2 * theta_z] Eigen::Quaterniond dq; Eigen::Vector3d dtheta_half = imupose.imu_gyro * dt /2.0; dq.w() = 1; dq.x() = dtheta_half.x(); dq.y() = dtheta_half.y(); dq.z() = dtheta_half.z(); dq.normalize(); /// imu 动力学模型 欧拉积分 Eigen::Vector3d acc_w = Qwb * (imupose.imu_acc) + gw; // aw = Rwb * ( acc_body - acc_bias ) + gw Qwb = Qwb * dq; Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w; Vw = Vw + acc_w * dt;
替换为中值法代码:
MotionData imupose_ = imudata[i-1];//上一时刻的数据 MotionData imupose = imudata[i];//下一时刻的数据 Eigen::Quaterniond dq; Eigen::Vector3d dtheta_half = (imupose_.imu_gyro+ imupose.imu_gyro)* dt / 4.0; dq.w() = 1; dq.x() = dtheta_half.x(); dq.y() = dtheta_half.y(); dq.z() = dtheta_half.z(); dq.normalize();//这里要记得归一化 Eigen::Vector3d acc_w = (Qwb * dq * (imupose.imu_acc) + gw + Qwb * (imupose_.imu_acc) + gw)/2;//这里注意下一时刻对应的转换矩阵是Qwb * dq,而不是Qwb Qwb = Qwb * dq; Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w; Vw = Vw + acc_w * dt;
结果分别为:
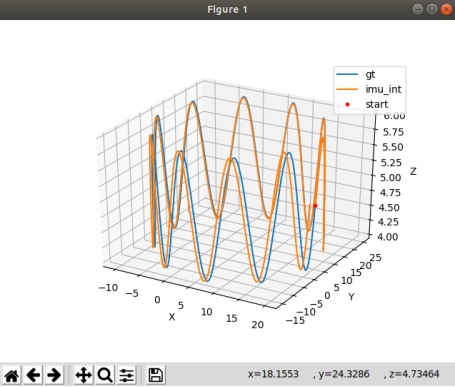
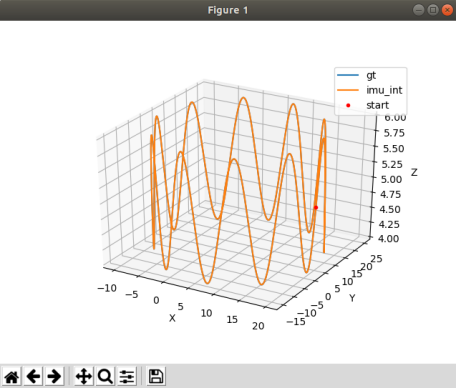
对比可以看出,中值积分法更加接近真值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号