

第一讲概述与课程介绍
1、课程专注于视觉——IMU容和定位的基础理论和实现
2、重点内容有:
IMU的工作原理和噪声方程
视觉与IMU的紧耦合的基础理论
从零开始实现VIO紧耦合优化器(仅基于Eigen)
3、课程安排:公式推导为主,代码为辅
4、VIO概述
VIO(Visual-inertial Odometry):以视觉与IMU融合实现里程计
IMU(Inertial Measurement Unit, 惯性测量单元):典型六轴IMU以较高频率(>=100Hz)返回被测量物体的角速度和加速度(由一个陀螺仪和一个加速度计组成),受自身温度、零偏、振动等因素干扰,积分得到的平移和旋转容易漂移
视觉Visual Odometry:以图像形式记录数据,频率较低(15-60Hz),通过图像特征点或像素推断相机运动
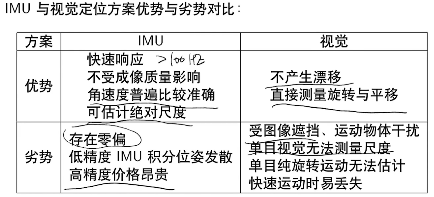 总体上,IMU适合计算短时间、快速的运动; 视觉适合计算长时间、慢速的运动。同时,可利用视觉定位信息来估计IMU的零偏,减少IMU由零偏导致的发散和累计误差;繁殖,IMU可以为视觉提供快速运动时的定位。
总体上,IMU适合计算短时间、快速的运动; 视觉适合计算长时间、慢速的运动。同时,可利用视觉定位信息来估计IMU的零偏,减少IMU由零偏导致的发散和累计误差;繁殖,IMU可以为视觉提供快速运动时的定位。
自动驾驶中常使用IMU+GPS/RTK,AR/VR常使用IMU+视觉
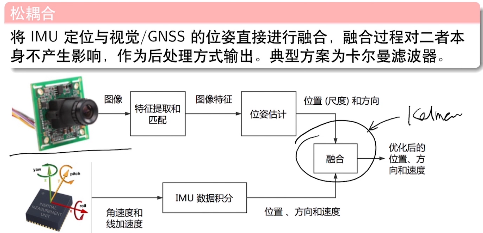
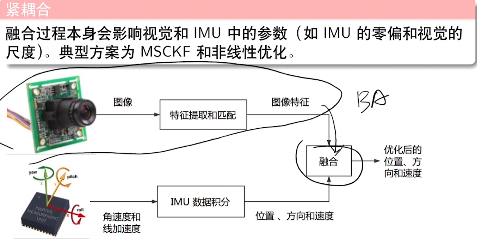
分为松耦合、紧耦合。
问题:
IMU的测量数据表达了系统的什么状态,受哪些噪声影响?
如何建立一个带有IMU测量信息和视觉特征点信息的非线性优化问题,并进行求解?
该问题随着时间将发生怎样的演变?
3.预备知识回顾
符号、坐标系、旋转(四元数)、四元数求导(李代数求导,左乘右乘)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号