

Gazebo-Tutorial3
1.使用Gazebo界面绘制模型(添加传感器、插件)
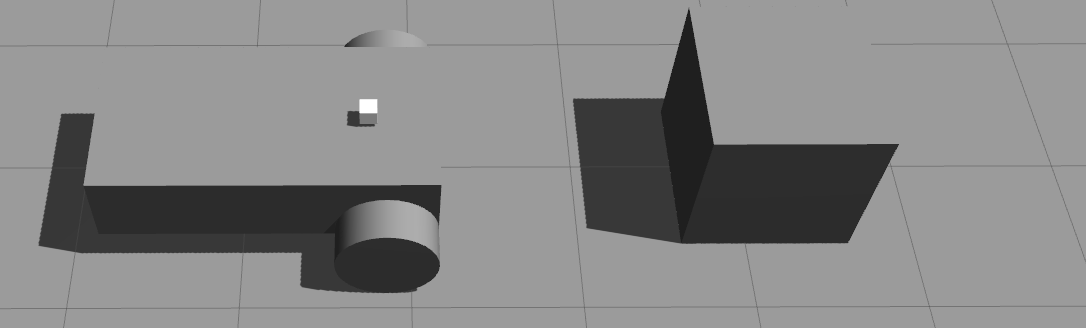
主要注意link和joint的设置就好,然后通过模型仓库添加传感器(depth_camera),用joint连接到自己画的模型上,最后添加插件(libFollowerPlugin.so),注意插件名字要没有用过。最后仿真时可以添加一个cube,可以看到小车向cube移动。如下图所示:
最后模型的保存地址: /home/jimlee/model_editor_models
2.编辑已存在的模型
将模型导入,然后右击,进入编辑模式即可。
3.Animated Box(学习gz中topic相关知识)
程序在 /home/jimlee/gazebo_animatedbbox_tutorial
查看Gazebo的topic: gz topic -v /gazebo/animated_box_world/pose/info
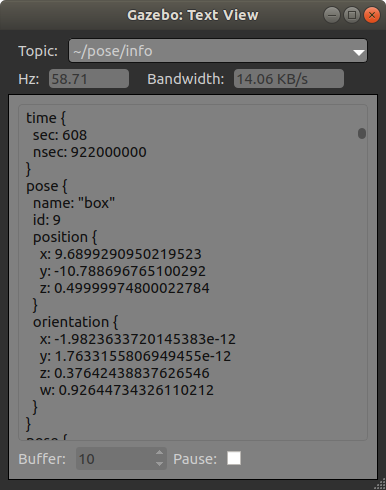
独立订阅gazebo中的topic: ./build/independent_listener
这里给出了一个方案,在程序中开启gzserver,并且加载world,最后用gzclient连接(显示作用)。
4.Animated model(动画模型)
动画与仿真的区别是,动画是按照固定轨迹运动的,不受物理引擎的影响。
Skeleton animation:模型中关节的相对运动(可以从COLLADA(.dae)和Biovision Hierarchy文件(.bvh)中导入)
trajectory:围绕轨迹运动,此时所有关节是一个整体(trajectory可以写在sdf脚本中)
通常把上面两个结合起来。
5.这里提供了一个使用Inkscape擦边规划部SVG(2D文件),然后通过Gazebo导入,extrude成3Dlink。
链接:http://gazebosim.org/tutorials?tut=extrude_svg&cat=model_editor_top

 浙公网安备 33010602011771号
浙公网安备 33010602011771号