

Gazebo-Tutorial2
1.添加mesh:
<mesh> <uri>model://pioneer2dx/meshes/chassis.dae</uri> <scale>0.9 0.5 0.5</scale> </mesh>
添加自己从3D Warehouse下载的Collada File(即.dae文件):
<mesh> <uri>model://my_robot/meshes/model.dae</uri> <scale>0.9 0.5 0.5</scale> </mesh>
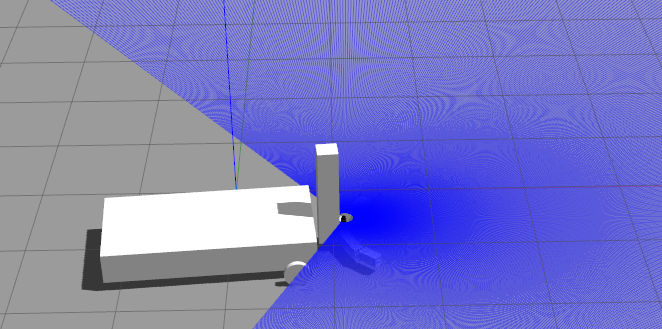
2.添加Sensor:
//laser
<include> <uri>model://hokuyo</uri> <pose>0.2 0 0.2 0 0 0</pose> </include> <joint name="hokuyo_joint" type="fixed"> <child>hokuyo::link</child> <parent>chassis</parent> </joint>
//camera
<include> <uri>model://camera</uri> <pose>0.2 0 0.2 0 0 0</pose> </include> <joint name="camera_joint" type="fixed"> <child>camera::link</child> <parent>chassis</parent> </joint>
3.一个简单的环境文件(.world文件)
<sdf version="1.4"> <world name="default"> <!-- A ground plane --> <include> <uri>model://ground_plane</uri> </include> <!-- A global light source --> <include> <uri>model://sun</uri> </include> <include> <uri>model://my_gripper</uri> </include> </world> </sdf>
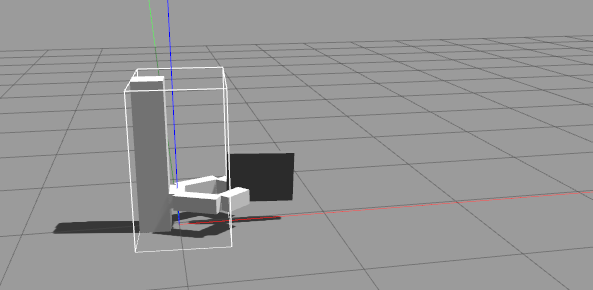
4.简单的移动抓手小车(simple_mobile_manipulator/manipulator.sdf)
<include>+joint的方式将模型嵌套起来,很方便,缺点是保存时,include将不会被保存(即所有link都在一个robot标签下),而通过直接写多个robot标签,再加上joint的方式,可以完全保存,方便修改。但总的来说,还是觉得include实用一点。
<?xml version="1.0" ?> <sdf version="1.5"> <model name="simple_mobile_manipulator"> <include> <uri>model://my_gripper</uri> <pose>1.3 0 0.1 0 0 0</pose> </include> <include> <uri>model://my_robot</uri> <pose>0 0 0 0 0 0</pose> </include> <joint name="arm_gripper_joint" type="fixed"> <parent>mobile_base::chassis</parent> <child>simple_gripper::riser</child> </joint> <!-- attach sensor to the gripper --> <include> <uri>model://hokuyo</uri> <pose>1.3 0 0.3 0 0 0</pose> </include> <joint name="hokuyo_joint" type="fixed"> <child>hokuyo::link</child> <parent>simple_gripper::palm</parent> </joint> </model> </sdf>

 浙公网安备 33010602011771号
浙公网安备 33010602011771号