

ARM Cortex-M3/M4初学习(未完待续)
ARM Cortex-M3/M4初学习
0. 架构与核心特性
0.1 指令集架构
- 基于ARMv7-M架构,支持Thumb-2指令集(混合16/32位指令集)
- 基于哈佛架构,数据和指令分布存储在独立的空间中
0.2 流水线
- 三级流水线: 取值(Fetch) - 译码(Decode) - 执行(Execute)
- 这种结构在简化设计和降低功耗的同时,仍然能够提供足够的处理能力。
0.3 总线结构
- I-bus(Instruction Bus,指令总线):
用于从代码存储器(如 Flash 或 ROM)中读取指令。
- D-bus(Data Bus,数据总线):
用于从内存(如 SRAM)或外设寄存器中读写数据。
- S-bus(System Bus,系统总线):
用于访问 内存映射的外设、系统控制块(SCB) 和 调试接口。
- DMA:(不一定存在)stm32f1,f4系列均有,一般每个DMA有8个 stream 流,其中f4系列的DMA具有FIFO
1. 寄存器组
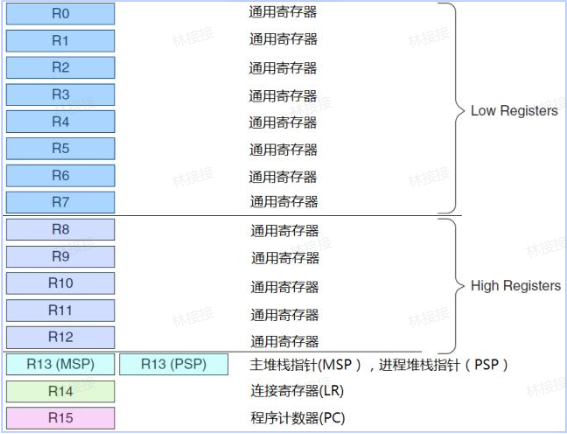
| 寄存器 | 说明 | 分组 |
|---|---|---|
| R0 | 通用寄存器 | Low Registers |
| R1 | 通用寄存器 | Low Registers |
| R2 | 通用寄存器 | Low Registers |
| R3 | 通用寄存器 | Low Registers |
| R4 | 通用寄存器 | Low Registers |
| R5 | 通用寄存器 | Low Registers |
| R6 | 通用寄存器 | Low Registers |
| R7 | 通用寄存器 | Low Registers |
| R8 | 通用寄存器 | High Registers |
| R9 | 通用寄存器 | High Registers |
| R10 | 通用寄存器 | High Registers |
| R11 | 通用寄存器 | High Registers |
| R12 | 通用寄存器 | High Registers |
| R13 | 主堆栈指针 (MSP) ,R13 (PSP) 为进程堆栈指针 (PSP) | - |
| R14 | 连接寄存器 (LR) | - |
| R15 | 程序计数器 (PC) | - |
1.1 通用寄存器:R0-R12(共13个)
- 低组寄存器(Low Registers):
R0-R7 为低组寄存器,所有指令都可以访问(共8个)
- 高组寄存器(High Registers):
R8-R12为高组寄存器,只有32位Thumb指令和很少的16位Thumb指令能访问(共5个)
1.2 堆栈指针:SP(R13)
cm3/cm4内核有两个SP,分别是MSP(主堆栈指针)和PSP(进程堆栈指针),共用寄存器地址
-
主 堆栈指针(MSP):
-
用于 特权模式(Handler Mode) 和 异常 / 中断处理。
-
由硬件自动切换,例如进入中断服务程序(ISR)时,处理器强制使用 MSP。
-
裸机默认只使用MSP
-
进程堆栈指针(PSP):
- 用于 用户模式(Thread Mode),通常运行应用程序或用户任务。
- 需手动配置,适用于多任务系统中不同任务的堆栈隔离。
- 常用于RTOS中
-
示例:FreeRTOS中是怎么使用MSP和PSP的
场景 使用的堆栈指针 说明 系统启动 MSP 默认模式,初始化阶段使用 用户任务运行 PSP 每个任务独立堆栈,由调度器管理 中断 / 异常处理 MSP 保证内核稳定性,隔离任务堆栈 任务切换(PendSV) PSP → MSP → PSP 保存旧任务 PSP,加载新任务 PSP 特权 API 调用 PSP(短暂切换) 通过 SVC 或直接寄存器操作
1.3 链接寄存器:LR
- 连接调用子程序(中断or异常or函数)时存储的返回地址
- 可以用于栈回溯调试
1.4 程序计数器:PC
- 指向当前程序运行的指令的地址
1.5 程序状态寄存器:xPSR
等我有时间学一下😁
2. 寄存器用途
- R0 到 R3:前4个函数参数使用R0-R4传参,超出部分通过堆栈传递
- R4 到 R11:局部变量,保存上下文,被调用者保存的寄存器。
- R12:临时寄存器,调用者保存的寄存器。
- SP:栈指针。
- LR:链接寄存器,用于保存返回地址。
- PC:程序计数器。
3. 堆栈
这里讨论的C语言中的堆栈,不是RTOS中的堆栈
堆栈的空间均分配在RAM中,一般可以通过修改启动文件来修改栈的大小
3.1 堆
- cm3/cm4中堆向上生长
- 由程序员分配,效率低
3.2 栈
-
栈一般是函数调用中会使用,所以过度递归会导致爆栈
-
由程序自动分配,效率高
-
cm3/cm4中栈向上生长
-
栈的最大调用深度可以通过MDK生成的htm文件查看(估计值)
KEIL MDK .map文件分析(必学知识点) - 正点原子倾力打造!-OpenEdv-开源电子网
4. CM3与CM4的区别
| 特性 | Cortex-M3 | Cortex-M4 |
|---|---|---|
| 指令集 | Thumb-2(支持部分 16/32 位指令) | Thumb-2 + DSP 扩展指令集 |
| 浮点单元(FPU) | 不支持 | 可选单精度 FPU(IEEE 754) |
| DSP 指令 | 无 | 支持乘加(MAC)、SIMD、饱和运算 |
| 硬件除法器 | 支持(32 位除法的周期数更多) | 优化除法周期(部分型号) |
5. 什么是哈佛架构?
- 定义:将程序指令和数据存储在两个独立的内存中的体系结构。
- 特点:
- 分离存储器:指令和数据各自有独立的存储空间。
- 独立总线:使用分开的总线分别传输指令和数据,允许同时访问指令和数据(并行)。
- 提高性能:通过并行访问指令和数据,增强系统的处理速度。
- 硬件复杂:需要两个独立的存储器和总线,硬件复杂性较高

 浙公网安备 33010602011771号
浙公网安备 33010602011771号