ROS配置分布式通信
2022-01-28 22:30 jym蒟蒻 阅读(212) 评论(0) 收藏 举报ROS配置分布式通信关键是,机器人和 PC 要处于同一网段。
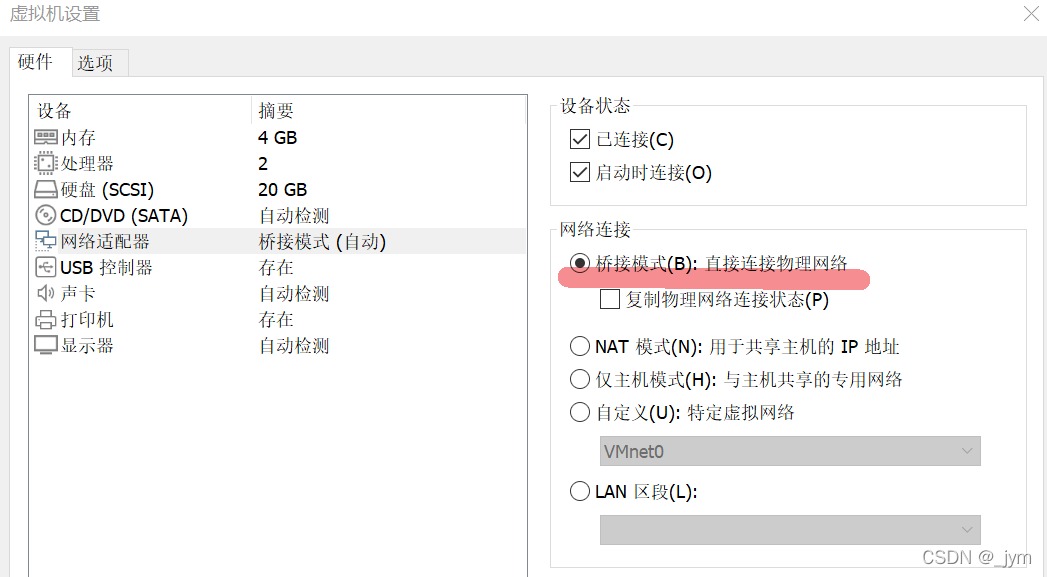
虚拟机网络适配器设置成桥接。
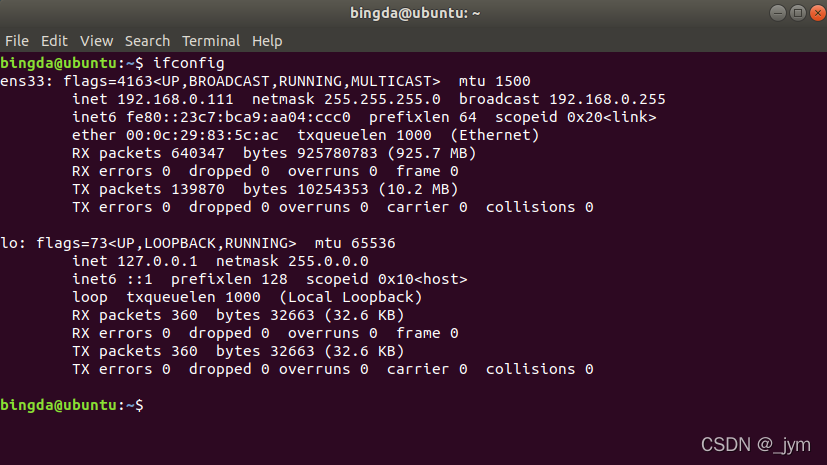
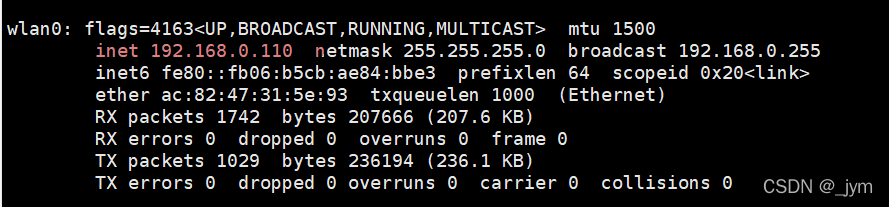
ifconfig查看虚拟机和机器人端的网络连接状态,看是否处于一个网段。下面两图,说明机器人和 PC 都是一个网段。
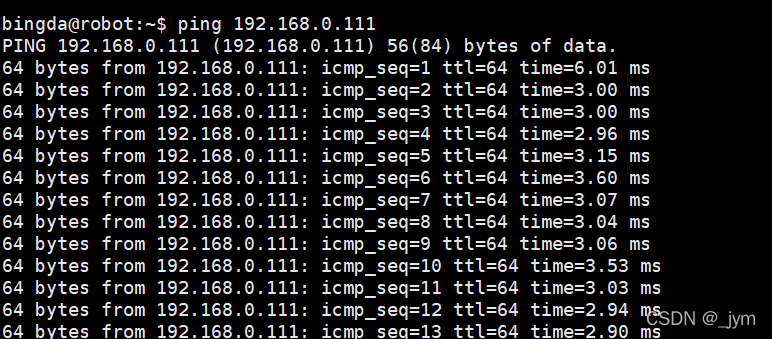
互相Ping测试连通性。

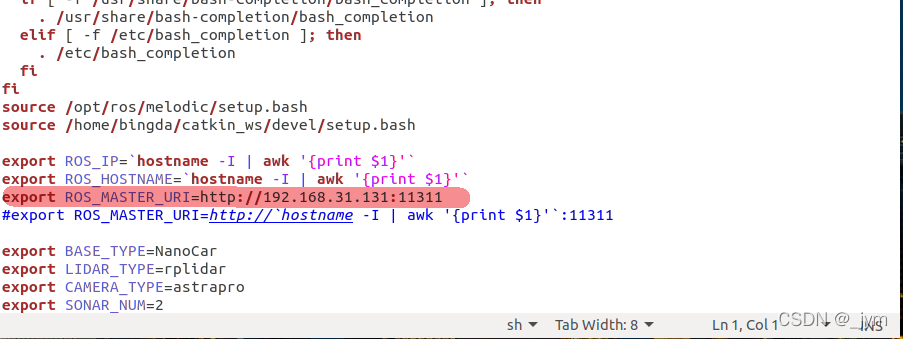
修改PC端bashrc文件
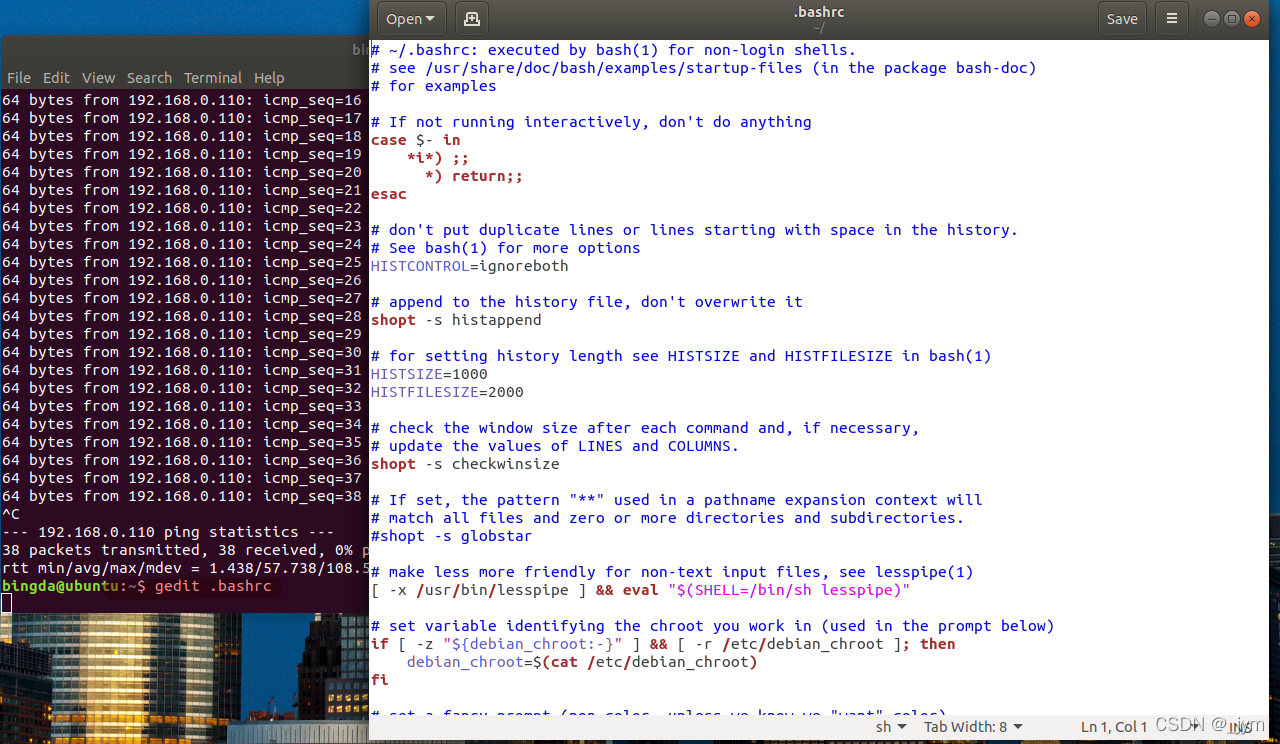
bashrc文件最下面这句话改成机器人的IP。后面端口号不用变。
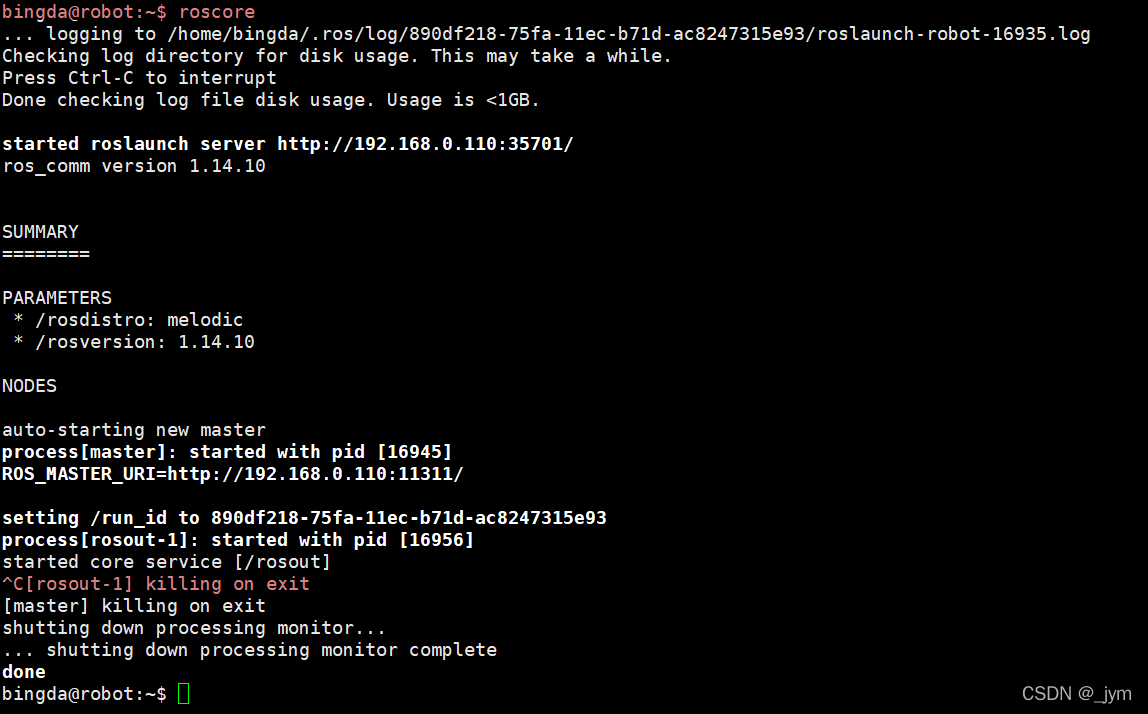
机器人端输入roscore。可以在PC端看到rostopic list,这就是分布式通信的好处,可以直接在 PC 端查看机器人端活跃的话题。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号