学习JUC源码(1)——AQS同步队列(源码分析结合图文理解)
前言
最近结合书籍《Java并发编程艺术》一直在看AQS的源码,发现AQS核心就是:利用内置的FIFO双向队列结构来实现线程排队获取int变量的同步状态,以此奠定了很多并发包中大部分实现基础,比如ReentranLock等。今天又是周末,便来总结下最近看的消化后的内容。
主要参考资料《Java并发编程艺术》(有需要的小伙伴可以找我,我这里只有电子PDF)结合ReentranLock、AQS等源码。
博文中的流程图,结构图等都是我理解之后一步步亲自画的,如果转载,请标明谢谢!
一、同步队列的结构与实现
1、同步队列的结构
(1)结构介绍
AQS使用的同步队列是基于一种CLH锁算法来实现(引用网上资料对CLH简单介绍):
CLH锁也是一种基于链表的可扩展、高性能、公平的自旋锁,申请线程只在本地变量上自旋,它不断轮询前驱的状态,如果发现前驱释放了锁就结束自旋;
结点之间是通过隐形的链表相连,之所以叫隐形的链表是由于这些结点之间没有明显的next指针,而是通过myPred所指向的结点的变化情况来影响myNode的行为;
当一个线程须要获取锁时,会创建一个新的QNode。将当中的locked设置为true表示须要获取锁。然后线程对tail域调用getAndSet方法,使自己成为队列的尾部。同一时候获取一个指向其前趋的引用myPred,然后该线程就在前趋结点的locked字段上旋转。直到前趋结点释放锁。
当一个线程须要释放锁时,将当前结点的locked域设置为false,同一时候回收前趋结点。线程A须要获取锁。其myNode域为true。些时tail指向线程A的结点,然后线程B也增加到线程A后面。tail指向线程B的结点。然后线程A和B都在它的myPred域上旋转,一旦它的myPred结点的locked字段变为false,它就能够获取锁。
而在源码中也有这样的介绍:
/**
* Wait queue node class.
*
* <p>The wait queue is a variant of a "CLH" (Craig, Landin, and
* Hagersten) lock queue. CLH locks are normally used for
* spinlocks.
* ...........
* <p>To enqueue into a CLH lock, you atomically splice it in as new
* tail. To dequeue, you just set the head field.
* <pre>
* +------+ prev +-----+ +-----+
* head | | <---- | | <---- | | tail
* +------+ +-----+ +-----+
* </pre>
* ..............
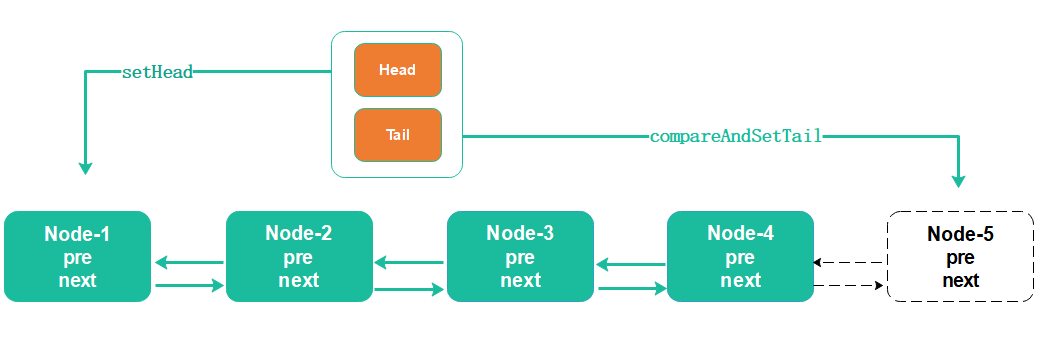
在AQS中的同步队列结构以及获取/释放锁都是基于此实现的,这里我们先放一个我画的基本结构来理解AQS同步队列,再进一步介绍一些细节。

根据以上图我们看到:
- 该队列是双向FIFO队列,每个节点都有pre、next域;
- 同步器包含了两个节点类型的引用,一个指向头结点,一个指向尾节点;
- 新加入线程被构造成Node通过调用compareAndSetTail加入同步队列中;
- 使用setHead(Node node)设置头结点,指向队列头。使用compareAndSetTail(Node exceptNode, Node updateNode)指向队列尾节点。
在源码中我们可以看到:
// 内部类Node节点 static final class Node{...} // 同步队列的head引用 private transient volatile Node head; // 同步队列的tail引用 private transient volatile Node tail;
(2)节点构成
那么Node结构的具体构成是什么呢?我们具体看内部类Node的源码:
static final class Node { /** Marker to indicate a node is waiting in shared mode */ static final Node SHARED = new Node(); /** Marker to indicate a node is waiting in exclusive mode */ static final Node EXCLUSIVE = null; /** waitStatus value to indicate thread has cancelled */ static final int CANCELLED = 1; /** waitStatus value to indicate successor's thread needs unparking */ static final int SIGNAL = -1; /** waitStatus value to indicate thread is waiting on condition */ static final int CONDITION = -2; /** * waitStatus value to indicate the next acquireShared should * unconditionally propagate */ static final int PROPAGATE = -3; /** 等待状态: * 0 INITAIL: 初始状态 * 1 CANCELLED: 由于等待超时或者被中断,需要从同步队列中取消等待,节点进入该状态不会被改变 * -1 SIGNAL: 当前节点释放同步状态或被取消,则等待状态的后继节点被通知 * -2 CONDITION: 节点在等待队列中,线程在Condition上,需要其它线程调用Condition的signal()方法才能从等待队转移到同步队列 * -3 PROPAGATE: 表示下一个共享式同步状态将会无条件被传播下去 */ volatile int waitStatus; /** 前驱结点 */ volatile Node prev; /** 后继节点 */ volatile Node next; /** 获取同步状态的线程 */ volatile Thread thread; /** 等待队列中的后继节点 */ Node nextWaiter; /** 判断Node是否是共享模式 */ final boolean isShared() { return nextWaiter == SHARED; } /** 返回前驱结点 */ final Node predecessor() throws NullPointerException { Node p = prev; if (p == null) throw new NullPointerException(); else return p; } Node() { // Used to establish initial head or SHARED marker } Node(Thread thread, Node mode) { // Used by addWaiter this.nextWaiter = mode; this.thread = thread; } Node(Thread thread, int waitStatus) { // Used by Condition this.waitStatus = waitStatus; this.thread = thread; } }
从源码中可以发现:同步队列中的节点Node用来保存获取同步状态失败的线程引用、等待状态以及前驱和后继节点。
节点是构成同步队列的基础,没有成功获取同步状态的线程将成为节点加入该队列的尾部。当一个线程无法获取同步状态时,会被构造成节点并加入同步队列中,通过CAS保证设置尾节点这一步是线程安全的,此时才能认为当前节点(线程)成功加入同步队列与尾节点建立联系。具体的实现逻辑请看下面介绍!
2、同步状态获取与释放
(1)独占式同步状态获取与释放
通过调用同步器acquire(int arg)方法可以获取同步状态,该方法中断不敏感,也就是由于线程获取同步状态失败后进入同步队列中,后序线程对进行中断操作时,线程不会从同步队列中移出
public final void acquire(int arg) { if (!tryAcquire(arg) && acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) selfInterrupt(); }
同步状态获取主要的流程步骤:
1)首先调用自定义同步器实现tryAcquire(int arg)方法,该方法保证线程安全的获取同步状态。
2)如果获取失败则构造同步节点(独占式Node.EXCLUSIVE)并通过addWaiter(Node ndoe)方法将该节点加入到同步队列的尾部,同时enq(node)通过for(;;)循环保证安全设置尾节点。
private Node addWaiter(Node mode) { // 根据给定模式构造Node Node node = new Node(Thread.currentThread(), mode); // Try the fast path of enq; backup to full enq on failure Node pred = tail; // 尝试在尾部添加 if (pred != null) { node.prev = pred; // cas方式保证正确添加尾节点 if (compareAndSetTail(pred, node)) { pred.next = node; return node; } } // enq主要是通过for(;;)死循环来确保节点正确添加 // 在for(;;)死循环中,通过cas将节点设置为尾节点时,才返回;否则一直尝试设置 enq(node); return node; } private Node enq(final Node node) { for (;;) { Node t = tail; if (t == null) { // Must initialize 当tail节点为null时,必须初始化构造好 head节点 if (compareAndSetHead(new Node())) tail = head; } else { // 否则就通过cas开始添加尾节点 node.prev = t; if (compareAndSetTail(t, node)) { t.next = node; return t; } } } }
假设原队列中存在Node-1到Node-4节点,此时某个线程获取同步状态失败则构成成Node-5通过CAS方式加入队列(下图忽略自旋环节)。
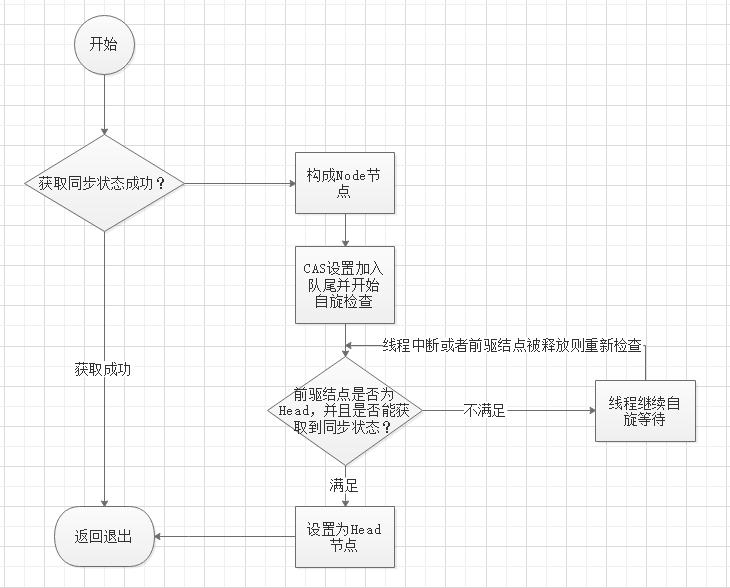
3)节点进入同步队列之后“自旋”,即acquireQueued(final Node node, int arg)方法,在这个方法中,当前node死循环尝试获取锁状态,但是只有node的前驱结点是Head才能尝试获取同步状态,获取成功之后立即设置当前节点为Head,并成功返回。否则就会一直自旋。
final boolean acquireQueued(final Node node, int arg) { boolean failed = true; try { boolean interrupted = false; for (;;) { final Node p = node.predecessor(); // 当前node节点的前驱是Head时(p == head),才能有资格去尝试获取同步状态(tryAcquire(arg)) // 这是因为当前节点的前驱结点获得同步状态,才能唤醒后继节点,即当前节点 if (p == head && tryAcquire(arg)) { // 以上条件满足之后 setHead(node); // 设置当前节点为Head p.next = null; // help GC // 释放ndoe的前驱节点 failed = false; return interrupted; } // 线程被中断或者前驱结点被释放,则继续进入检查:p == head && tryAcquire(arg if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) interrupted = true; } } finally { if (failed) cancelAcquire(node); } }
此时新加入的Node-5节点也开始自旋,此时的Head(Node-1)已经获取到了同步状态,而Node-2退出了自旋,成为了新的Head。
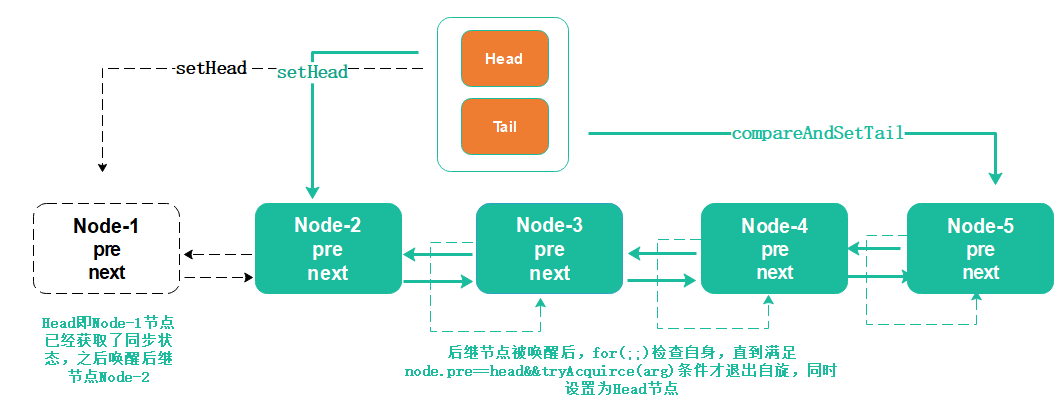
文字总结:
1)同步器会维护一个双向FIFO队列,获取同步失败的线程将会被构造成Node加入队尾(并且做自旋检查:检查前驱结点是否是Head);
2)当前线程想要获得同步状态,前提是其前驱结点是头结点,并且获得了同步状态;
3)当Head调用release(int arg)释放锁的同时会唤醒后继节点(即当前节点),后继节点结束自旋
流程图总结:
同步器的release方法:释放锁的同时,唤醒后继节点(进而时后继节点重新获取同步状态)
public final boolean release(int arg) { if (tryRelease(arg)) { Node h = head; if (h != null && h.waitStatus != 0) // 该方法会唤醒Head节点的后继节点,使其重试尝试获取同步状态 unparkSuccessor(h); return true; } return false; }
UnparkSuccessor(Node node)方法使用LookSupport(LockSupport.unpark)唤醒处于等待状态的线程(之后会慢慢看源码介绍)。
(2)共享式同步状态获取与释放
共享锁跟独占式锁最大的不同就是:某一时刻有多个线程同时获取到同步状态,获取判断是否获取同步状态成功的关键,获取到的同步状态要大于等于0。而其他步骤基本都是一致的,还是从源码开始分析起:带后缀Share都为共享式同步方法。
1)acquireShared(int arg)获取同步状态:如果获取失败则加入队尾,并且检查是否具备退出自旋的条件(前驱结点是头结点并且能成功获取同步状态)
public final void acquireShared(int arg) { // tryAcquireShared 获取同步状态,大于0才是获取状态成功,否则就是失败 if (tryAcquireShared(arg) < 0) // 获取状态失败则构造共享Node,加入队列; // 并且检查是否具备退出自旋的条件:即preNode为head,并且能获取到同步状态 doAcquireShared(arg); }
2)doAcquireShared(arg):获取失败的Node加入队列,如果当前节点的前驱结点是头结点的话,尝试获取同步状态,如果大于等于0则在for(;;)中退出(退出自旋)。
private void doAcquireShared(int arg) { // 构造共享模式的Node final Node node = addWaiter(Node.SHARED); boolean failed = true; try { boolean interrupted = false; for (;;) { final Node p = node.predecessor(); if (p == head) { int r = tryAcquireShared(arg); // 前驱节点是头结点,并且能获取状态成功,则return返回,退出死循环(自旋) if (r >= 0) { setHeadAndPropagate(node, r); p.next = null; // help GC if (interrupted) selfInterrupt(); failed = false; return; } } if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) interrupted = true; } } finally { if (failed) cancelAcquire(node); } }
3)releaseShared(int arg):释放同步状态,通过loop+CAS方式释放多个线程的同步状态。
public final boolean releaseShared(int arg) { if (tryReleaseShared(arg)) { // 通过loop+CAS方式释放多个线程的同步状态 doReleaseShared(); return true; } return false; }
二、自定义同步组件(实现Lock,内部类Sync继承AQS)
1、实现一个不可重入的互斥锁Mutex
2、实现指定共享数量的共享锁MyShareLock
--------------未完待续(为了加深理解画图写代码花费时间较长,所以慢慢来保证质量,不着急!)-------------
------------------2020.12.08已补充,学习JUC源码(2)——自定义同步组件----------------------

 浙公网安备 33010602011771号
浙公网安备 33010602011771号