


STM32学习笔记——printf
printf复习
当我们写printf("%d\n", 1);的时候,printf函数并不能通过C语言语法得知第二个参数是int类型。printf是一个变参函数(variadic function):
int printf(const char *restrict format, ...);
参数的类型都是通过格式串format推导出的。如果参数类型与格式串中指定的不匹配,或提供的参数数量少于需要的,将导致未定义行为。
由于参数类型是动态的,printf和scanf比静态类型的std::cout和std::cin慢,前提是后者的众多overhead被手动消除。
C为可变参数提供了va_start、va_arg、va_copy、va_end、va_list等工具,定义在头文件<stdarg.h>中。va_arg用于取出参数,va_copy用于拷贝参数供多次使用。引用cppreference上的例子:
#include <stdio.h>
#include <stdarg.h>
#include <math.h>
double sample_stddev(int count, ...)
{
/* Compute the mean with args1. */
double sum = 0;
va_list args1;
va_start(args1, count);
va_list args2;
va_copy(args2, args1); /* copy va_list object */
for (int i = 0; i < count; ++i) {
double num = va_arg(args1, double);
sum += num;
}
va_end(args1);
double mean = sum / count;
/* Compute standard deviation with args2 and mean. */
double sum_sq_diff = 0;
for (int i = 0; i < count; ++i) {
double num = va_arg(args2, double);
sum_sq_diff += (num-mean) * (num-mean);
}
va_end(args2);
return sqrt(sum_sq_diff / count);
}
int main(void)
{
printf("%f\n", sample_stddev(4, 25.0, 27.3, 26.9, 25.7));
}
<stdio.h>还定义了vprintf系列函数,与不带v的相比,可变参数...都换成了va_list的实例:
int vprintf(const char *format, va_list vlist);
可以借此实现自己的printf。
可变参数在传递的过程中会被执行默认参数提升(default argument promotion),对于整数类型执行整数提升(提升为int或unsigned int),对于float类型提升成double。
格式串format中的普通字符直接拷贝到输出流,由%引导的称为转换格式(conversion specification),在%和转换说明符(conversion specifier)之间可以有若干修饰符,实现对齐、精度等功能,转换说明符有c、s、d、f等,详见cppreference。
UART实现
单片机开发板并没有可以用于输出的控制台,printf调用最后都会归结为_write函数:
int _write(int file, char* ptr, int len);
_write函数需要把ptr指向的len字节的数据以想要的形式发送,在此就沿用上一篇中的UART异步IO,于是printf就可以打印在串口上了。
为了方便日后使用,我把USART相关的代码抽离出来放在一个新的源文件里,IDE生成的代码去掉MX_USART1_UART_Init和USART1_IRQHandler两个函数,再加上这一对文件就可以使用了。
usart1.h:
#include <stdio.h>
void MX_USART1_UART_Init();
void usart1_transmit(char c);
char usart1_receive();
usart1.c:
#include "usart1.h"
#include <stdbool.h>
#include <stdint.h>
#include <stdlib.h>
#include "cmsis_gcc.h"
#include "stm32f4xx_hal.h"
typedef char queue_element_t;
typedef struct
{
uint16_t mask;
uint16_t head;
uint16_t tail;
queue_element_t data[0];
} queue_t;
static inline queue_t* queue_create(uint16_t _size)
{
if (_size & (_size - 1))
_size = 256;
queue_t* q = malloc(sizeof(queue_t) + _size * sizeof(queue_element_t));
if (q)
{
q->mask = _size - 1;
q->head = q->tail = 0;
}
return q;
}
static inline bool queue_empty(const queue_t* _queue)
{
return _queue->head == _queue->tail;
}
static inline uint16_t queue_size(const queue_t* _queue)
{
return (_queue->tail - _queue->head) & _queue->mask;
}
static inline uint16_t queue_capacity(const queue_t* _queue)
{
return _queue->mask;
}
static inline queue_element_t queue_peek(const queue_t* _queue)
{
return _queue->data[_queue->head];
}
static inline void queue_push(queue_t* _queue, const queue_element_t _ele)
{
_queue->data[_queue->tail] = _ele;
_queue->tail = (_queue->tail + 1) & _queue->mask;
}
static inline void queue_pop(queue_t* _queue)
{
_queue->head = (_queue->head + 1) & _queue->mask;
}
extern UART_HandleTypeDef huart1;
extern void Error_Handler();
queue_t* tx_buffer;
queue_t* rx_buffer;
void USART1_IRQHandler()
{
uint32_t isrflags = USART1->SR;
uint32_t cr1its = USART1->CR1;
uint32_t errorflags = 0x00U;
errorflags = (isrflags & (uint32_t)(USART_SR_PE | USART_SR_FE | USART_SR_ORE | USART_SR_NE));
if (errorflags == RESET)
{
if (((isrflags & USART_SR_RXNE) != RESET) && ((cr1its & USART_CR1_RXNEIE) != RESET))
{
queue_push(rx_buffer, USART1->DR);
return;
}
if (((isrflags & USART_SR_TXE) != RESET) && ((cr1its & USART_CR1_TXEIE) != RESET))
{
USART1->DR = queue_peek(tx_buffer);
queue_pop(tx_buffer);
if (queue_empty(tx_buffer))
USART1->CR1 &= ~USART_CR1_TXEIE & UART_IT_MASK;
return;
}
}
HAL_UART_IRQHandler(&huart1);
}
void MX_USART1_UART_Init()
{
tx_buffer = queue_create(1024);
rx_buffer = queue_create(1024);
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
USART1->CR1 |= USART_CR1_RXNEIE & UART_IT_MASK;
}
void usart1_transmit(char c)
{
uint16_t capacity = queue_capacity(tx_buffer);
bool ok = false;
while (1)
{
__disable_irq();
ok = capacity - queue_size(tx_buffer) >= 1;
if (ok)
break;
__enable_irq();
__NOP();
}
queue_push(tx_buffer, c);
USART1->CR1 |= USART_CR1_TXEIE & UART_IT_MASK;
__enable_irq();
}
char usart1_receive()
{
bool ok = false;
while (1)
{
__disable_irq();
ok = !queue_empty(rx_buffer);
if (ok)
break;
__enable_irq();
__NOP();
}
char c = queue_peek(rx_buffer);
queue_pop(rx_buffer);
__enable_irq();
return c;
}
int _write(int file, char* ptr, int len)
{
for (int i = 0; i != len; ++i)
usart1_transmit(*ptr++);
return len;
}
main.c(部分):
#include "main.h"
#include "usart1.h"
UART_HandleTypeDef huart1;
uint8_t count = 0;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
while (1)
{
printf("Hello world: %d\n", count);
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
++count;
HAL_Delay(500);
}
}
ITM实现
明明已经用调试器连接了开发板和电脑,还要加个USB转串口工具就显得很累赘;IDE和串口监视器两个窗口的频繁切换也让Alt和Tab键损坏的几率增加了几成。有没有办法让开发板通过调试器和IDE就能输出呢?
可以用ARM的ITM(Instrumentation Trace Macroblock),通过TRACESWO发送。SWO与JTAG的JTDIO是同一个引脚,用标准ST-LINK的20-pin排线可以连接,但是10-pin的简版ST-LINK没有引出SWO,因此要使用ITM调试不能用简版的4线接法。
ITM无需初始化,直接调用ITM_SendChar函数即可发送,该函数定义在\Drivers\CMSIS\Include\core_cmx.h中。ITM版的_write函数,不过是把usart1_transmit换成ITM_SendChar而已。
#include "main.h"
#include <stdio.h>
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
int _write(int file, char* ptr, int len)
{
for (int i = 0; i != len; ++i)
ITM_SendChar(*ptr++);
return len;
}
uint8_t count = 0;
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
while (1)
{
printf("Hello world: %d\n", count);
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
++count;
HAL_Delay(500);
}
}
为了在IDE中看到printf输出的内容,需要做几步配置。首先进入Debug模式,在调试选项的Debugger页启用SWV:

找到SWV ITM Data Console窗口:
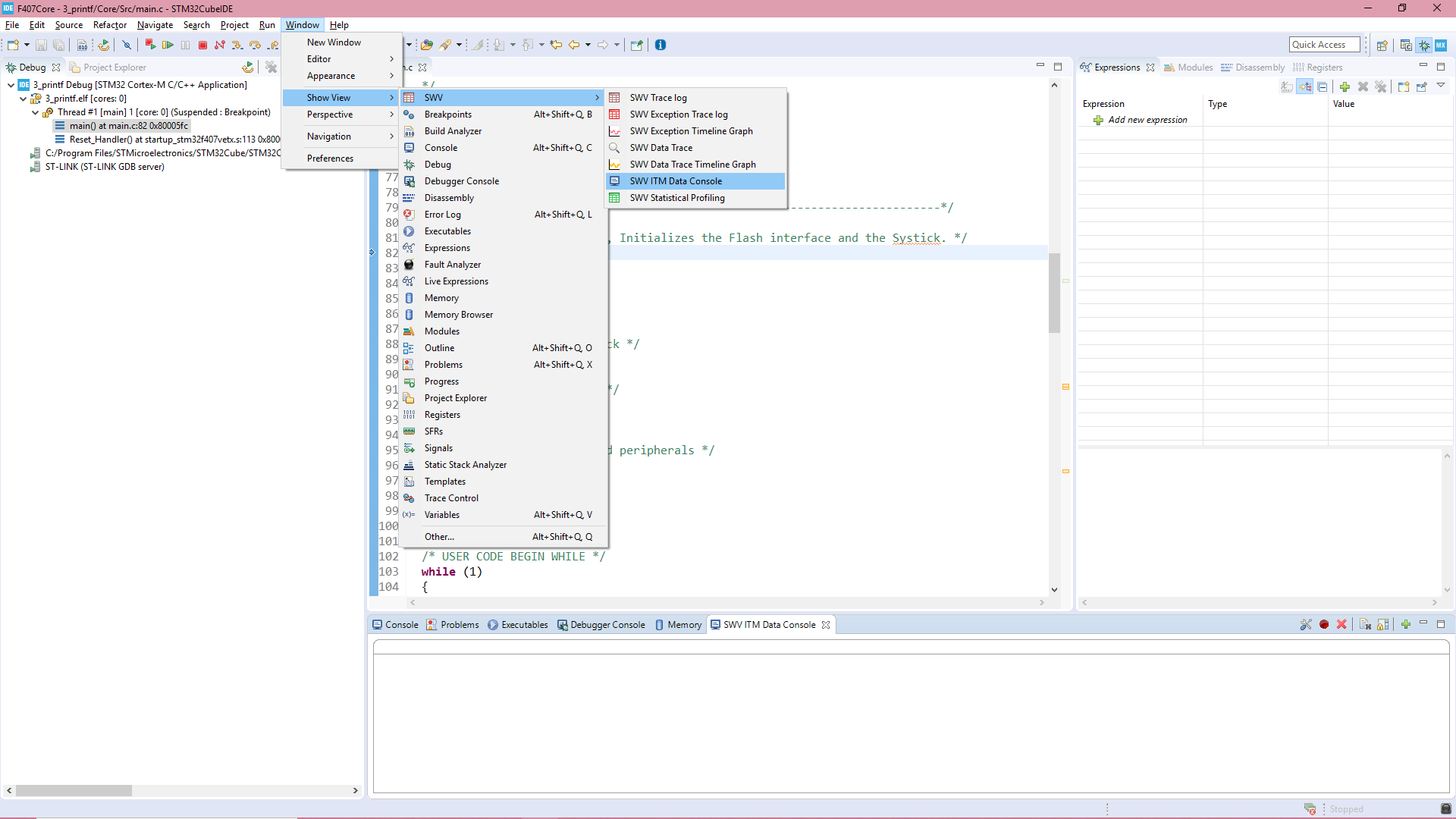
窗口右上角Configure trace,勾选Port 0:
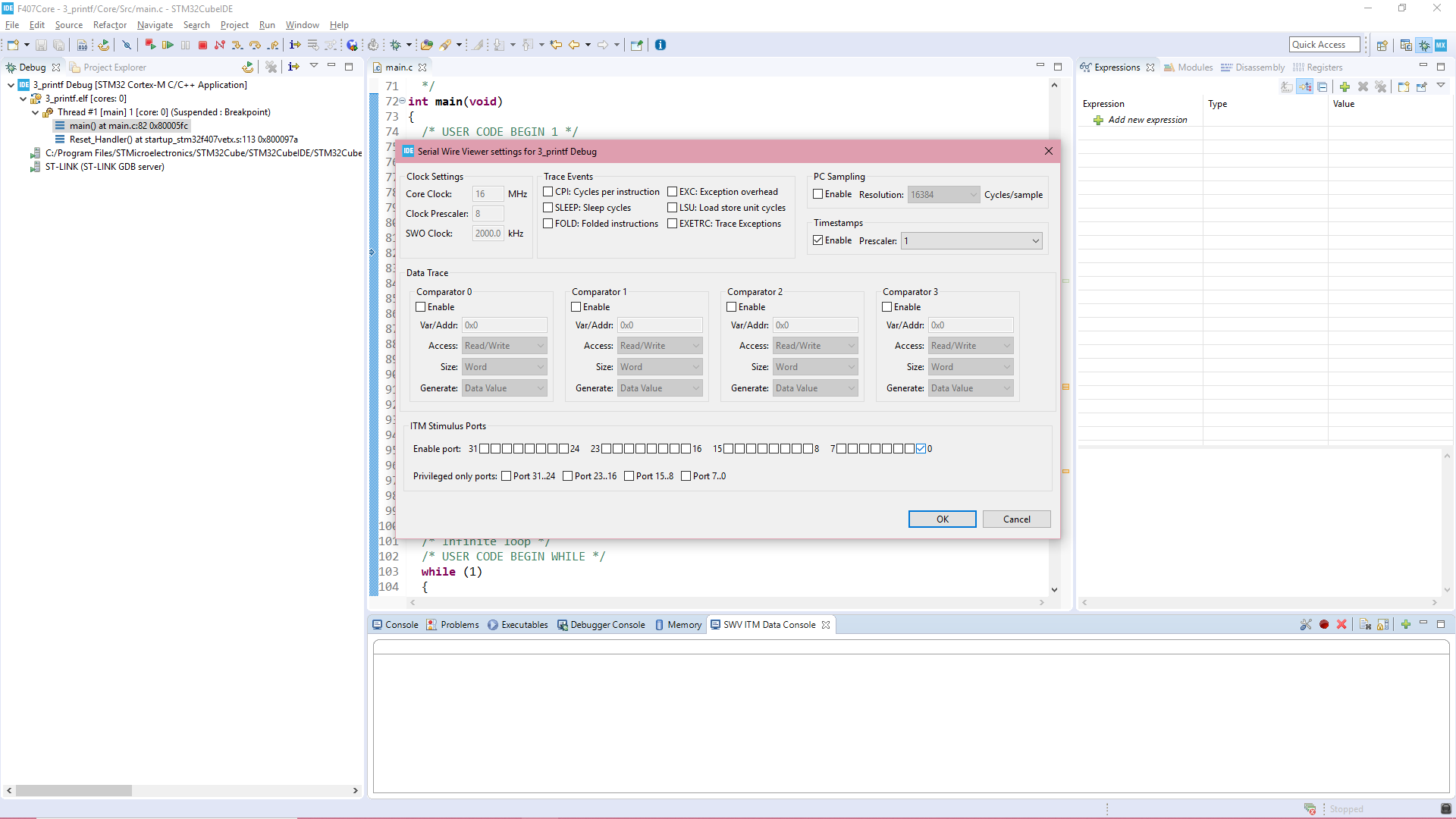
点击Start Trace。这样就可以看见printf的输出了:

杂记
好久没更博客了。这两周一直在做摇摇棒,硬件软件交替着改,总算是做出一个比较稳定的显示效果了。计划本月再更两篇。
有一次下载器与摇摇棒的连接有松动,数据传输错误,导致熔丝位被修改,时钟源选择了不存在的,程序无法启动,也无法下载新的程序。还好我带着这块STM32开发板,在一个引脚上产生一个较高频率的方波,连接到单片机的晶振引脚,改回熔丝位,算是把单片机救活了。本来STM32开发板带着是要写这篇printf的,博客没写,倒是有救场的用途。
与printf相对的scanf,我也尝试过实现,但是有两个问题,一是我没有找到在STM32CubeIDE中如何通过ITM向单片机发送,二是_read函数的len参数总是1024,这是想让我一次性读1024个字节再返回吗?
posted on 2020-06-09 01:36 Jerry_SJTU 阅读(1982) 评论(0) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号