
[学习]ICC通话系统
内容来源于论文《Signal Processing for in-car communication systems》
【场景描述】车舱中前后排通话,前排mic采前排说话,后排spk播给后排;后排spk采后排,前排spk播放给前排。
【核心问题】因为ICC是一个闭环电声效果循环系统,为了保证稳定,主要是解决声学反馈,如啸叫(howling)。
【系统算法】波束形成, 回声消除,降噪等。
【前端系统区别】免提电话或语音识别前处理系统对比,激励信号和失真部分是高度相关的,导致自适应算法收敛相关的问题。并且,ICC系统有非常严格的处理延迟需求。
1.问题描述
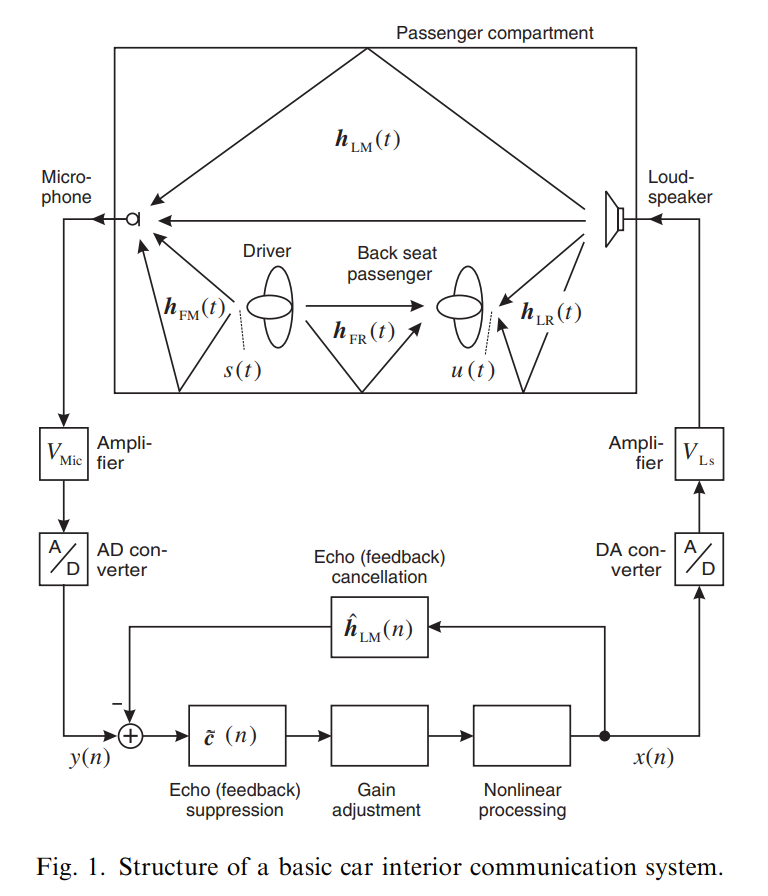
如图1,前排mic至少拾取后排spk一部分声音,如果该部分声不足够小则持续振荡发生——即啸叫。啸叫边界依赖ICC的输出增益。故ICC系统的所有增益要小心调节,否则易啸叫。 为了提高边界的稳定,引入如波束形成、反馈/回声消除、自适应陷波、自适应增益控制、均衡器、非线性处理等方法。
分析:这是一个Front--->Rear的收发系统。上述的系统 前排麦克风拾取到扬声器发出的声音,若这部分声音不足够小会造成持续振荡出现,产生啸叫
2. 基础
(2.1) 没有ICC的通话
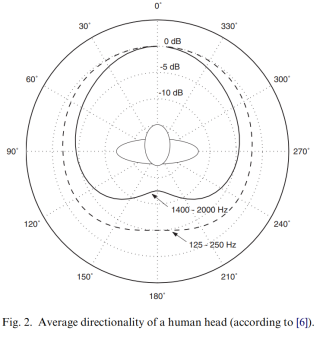
从图2可知,分析了人头和声源指向的性能。考虑了1400Hz~2000Hz和125~250Hz两个频段。可以发现1400Hz~2000Hz受人头和声源位置的角度影响。若是说话人/听音人面对面交流vs.前后交流,声压级相差10多个dB。
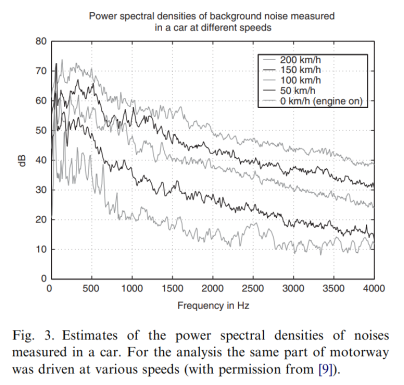
从图3可知,车内的噪声频段相对关系和噪声随速度的变化大小。车内的噪声低频远大于高频,噪声随速度增加,增加到150km/h,噪声增大了30dB。但由于隆巴德效应,增益不需要增大到30dB。
隆巴德效应:指的是生物在噪声环境中通过提高发声强度、调整基频等方法补偿噪声干扰的干扰。
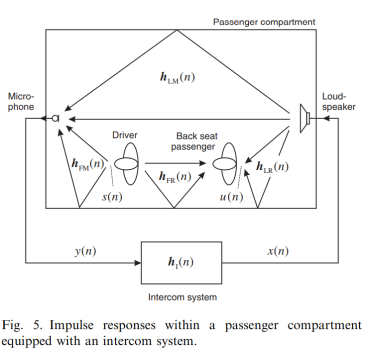
(2.2) 有ICC的通话
假设ICC系统输入y(n)和输出x(n),传递函数为:
![]()
(2.2.1)闭环系统的频率响应
该系统的麦克风采集到扬声器播出的传递函数为:
![]()
为了获得一个稳定的系统,开环增益应该小于1。则这个系统的上边界为:
![]()
故为了减少mic拾取到扬声器发出的声,则引入一个反馈消除支路,如下图6所示。
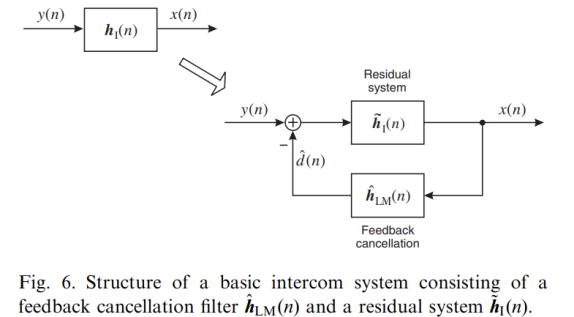
这个系统的频率响应为:
![]()
结合公式(5),则麦克风到扬声器的传递函数为:
![]()
由此可见,ICC系统的最大增益受限于:扬声器到麦克风真实路径和估计路径的差异。最有的情况,真实和估计路径完全相同。由于人头的移动等原因,多数自适应算法将收敛到维纳解。
**消除啸叫,核心是两个要点:
1.增益(衰减):每次spk-mic的循环能量是衰减的,即开环增益的绝对值小于1;
2.相位(相反):相位是180°的奇数倍,形成负反馈。
总的来说,若|开环增益|>1且满足相位是360°的整数倍,则系统振荡。
根据巴克豪森准则:A是前向开环增益,β是反馈系数
1.幅度条件:|Aβ| = 1
2.相位条件∠Aβ=±180°
总的来说,若系统在某个频率上持续振荡,要破坏啸叫则需要破坏幅度和相位条件。若|Aβ| < 1,则振荡会不断衰减.
(2.2.2) 说话人到听声人的传输路径
要点:视觉和听觉匹配,即说话人在前,后排扬声器布置在最后面,声从后面进入听声人耳朵,要点是控制延迟,基于哈斯效应,时延要控制在10~20ms之内(经验值)。
(2.2.3)从说话人到说话人
要点是:后排扬声器播放前排麦克风拾取的前排说话声,但播放出来的声若被前排感知,导致听觉系统的自掩蔽效应,则堆前排体验很差(不可接受)。因此,整体延迟不要超过10ms。
布置总结:
1.扬声器要靠近听音人,远离说话人
2.引入扬声器阵列,使得声音指向听音人而避免指向说话人
(3)ICC系统的信号处理

(3.1)基本架构
总的来说,
1.波束形成:由于前排说话人位置相对固定,使用固定的波束形成
2.回声消除:消除立体声系统影响,若不消除,如音乐会引入混响感,如消除后排麦克风拾取的后排到前排的声信号。
3.反馈抑制:消除反馈,避免啸叫
4.反馈抑制:自适应陷波,快速压住啸叫频率。
5.自适应增益:控制增益
(3.2)预处理
由之前内容分析可知,背景噪声主要集中在低频部分,且低频的指向特性不如中高频。因此,使用低阶的巴特沃斯高通滤波器(@3dB 截止频率300Hz); 另外,可检查A/D是否发生截断。
(3.3)波束形成(固定波束形成)
一个阵列中的每个mic进行时延补偿进行对齐,使得,每个mic来自目标方向的声波对齐后,加强相干信号,而其他干扰和噪声相对减弱。
(3.4)回声消除
主要是两部分
1.立体声部分
2.后排乘客的增强信号经过前排扬声器播放后被前mic拾取(即消除前排扬声器的影响)
(3.4.1)立体声部分的回声消除
假设左/右通道信号xL/xR,他们到麦克风的传递响应为hL/hR,则自适应滤波器要计算估计传递路径。若左右相关程度高,则导致回声估计不准,即回声估计不正交,不独立,难获得准确估计结果,因此需要对立体声信号做细微的处理:
1.非线性处理,破坏相关性
2.微调处理,一个通道对另一个通道引入一个周期变化的delay
3.加入随机噪声
(3.4.1)ICC输出部分的回声消除
一种方法,引入Loss Control即开关控制,双工控制
引入自适应陷波滤波器,如NLM算法等
Biquad实现峰值滤波器
(3.9)噪声消除(NN算法)
消除背景等各种噪声。
如上,为ICC系统的基本架构。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号