执行计划跑偏,你了解背后的根因吗?
关于作者:
Nickyoung,数据库领域从业者。PostgreSQL ACE,IvorySQL 专家顾问委员会成员。
公众号“👉PostgreSQL 运维之道”。
还在以最终 cost 来判断计划是否最优?那就大错特错了!!!本篇老杨和大家一起抽丝剥茧,从源码入手分析计划跑偏的原因。
问题现象
一个简单查询运行 240s,从执行计划看耗时主要在 nestloop join,Outter 扫描了 2293 行,inner loop 扫描了 2293 次,耗时 103.1 * 2293 = 236408ms
test=> explain analyze select count(*),zone_id from instance_info where instanceid in (SELECT instanceid
FROM
instance_info
wherevisible = 1
GROUPBY
instanceid
HAVING
COUNT(DISTINCT zone_id) > 1) andvisible = 1groupby zone_id;
QUERY PLAN
-------------------------------------------------------------------------------------------------------------------------------------------------
GroupAggregate (cost=232.45..232.47 rows=1 width=12) (actual time=244941.317..244942.725 rows=4.00 loops=1)
Group Key: instance_info.zone_id
Buffers: shared hit=3
-> Sort (cost=232.45..232.45 rows=1 width=4) (actual time=244940.890..244941.590 rows=4588.00 loops=1)
Sort Key: instance_info.zone_id
Sort Method: quicksort Memory: 193kB
Buffers: shared hit=3
-> Nested Loop (cost=200.01..232.44 rows=1 width=4) (actual time=124.292..244935.769 rows=4588.00 loops=1)
Join Filter: ((instance_info.instanceid)::text = (instance_info_1.instanceid)::text)
Rows Removed by Join Filter: 20185277
-> Foreign Scan (cost=100.01..116.12 rows=1 width=146) (actual time=25.421..137.939 rows=2293.00 loops=1)
Relations: Aggregate on (instance_info instance_info_1)
-> Foreign Scan on instance_info (cost=100.00..116.30 rows=2 width=150) (actual time=1.290..103.183 rows=8805.00 loops=2293)
Planning:
Buffers: shared hit=173
Planning Time: 1.516 ms
Execution Time: 244953.762 ms
(17 rows)
test=>
一般遇到这种情况,肯定是尝试“关闭”nestloop 试试看,走了 Hashjoin 后执行耗时仅 287ms,性能提升快 1000 倍。
test=> set enable_nestloop tooff;
SET
test=> explain analyze select count(*),zone_id from instance_info where instanceid in (SELECT instanceid
FROM
instance_info
wherevisible = 1
GROUPBY
instanceid
HAVING
COUNT(DISTINCT zone_id) > 1) andvisible = 1groupby zone_id;
QUERY PLAN
----------------------------------------------------------------------------------------------------------------------------------------------
GroupAggregate (cost=232.44..232.46 rows=1 width=12) (actual time=273.475..274.907 rows=4.00 loops=1)
Group Key: instance_info.zone_id
Buffers: shared hit=3
-> Sort (cost=232.44..232.45 rows=1 width=4) (actual time=273.006..273.722 rows=4588.00 loops=1)
Sort Key: instance_info.zone_id
Sort Method: quicksort Memory: 193kB
Buffers: shared hit=3
-> Hash Join (cost=216.13..232.43 rows=1 width=4) (actual time=160.901..271.843 rows=4588.00 loops=1)
Hash Cond: ((instance_info.instanceid)::text = (instance_info_1.instanceid)::text)
-> Foreign Scan on instance_info (cost=100.00..116.30 rows=2 width=150) (actual time=4.691..109.722 rows=8805.00 loops=1)
-> Hash (cost=116.12..116.12 rows=1 width=146) (actual time=156.185..156.186 rows=2293.00 loops=1)
Buckets: 4096 (originally 1024) Batches: 1 (originally 1) Memory Usage: 144kB
-> Foreign Scan (cost=100.01..116.12 rows=1 width=146) (actual time=21.939..155.037 rows=2293.00 loops=1)
Relations: Aggregate on (instance_info instance_info_1)
Planning Time: 0.242 ms
Execution Time: 287.414 ms
(16 rows)
test=>
为什么优化器走了效率更差的 nested loop?
统计信息不准?优化器代价计算偏差?
问题分析
从 nestloop 和 Hashjoin 对应 path 的最终 cost 来看
GroupAggregate (cost=232.45..232.47)
GroupAggregate (cost=232.44..232.46)
后者对应 path 最终的 startup_cost 和 total_cost 都要小,为什么优化器没有选择 Hashjoin 这条路径?
所以这里会有一个误区:老杨也曾以为优化器选择最优执行计划,肯定是生成每种路径后,比较最终的 cost,最终 cost 最小的为最优计划。
事实上在 add_path 生成路径的过程中,每个节点都会进行 cost 比较,可能采用 new_path,或者保留 old_path,或者都保留。比如说在生成 Joinpath 时,可能只保留了一种 JoinMethod 进入下一计划节点,生成最终执行计划。
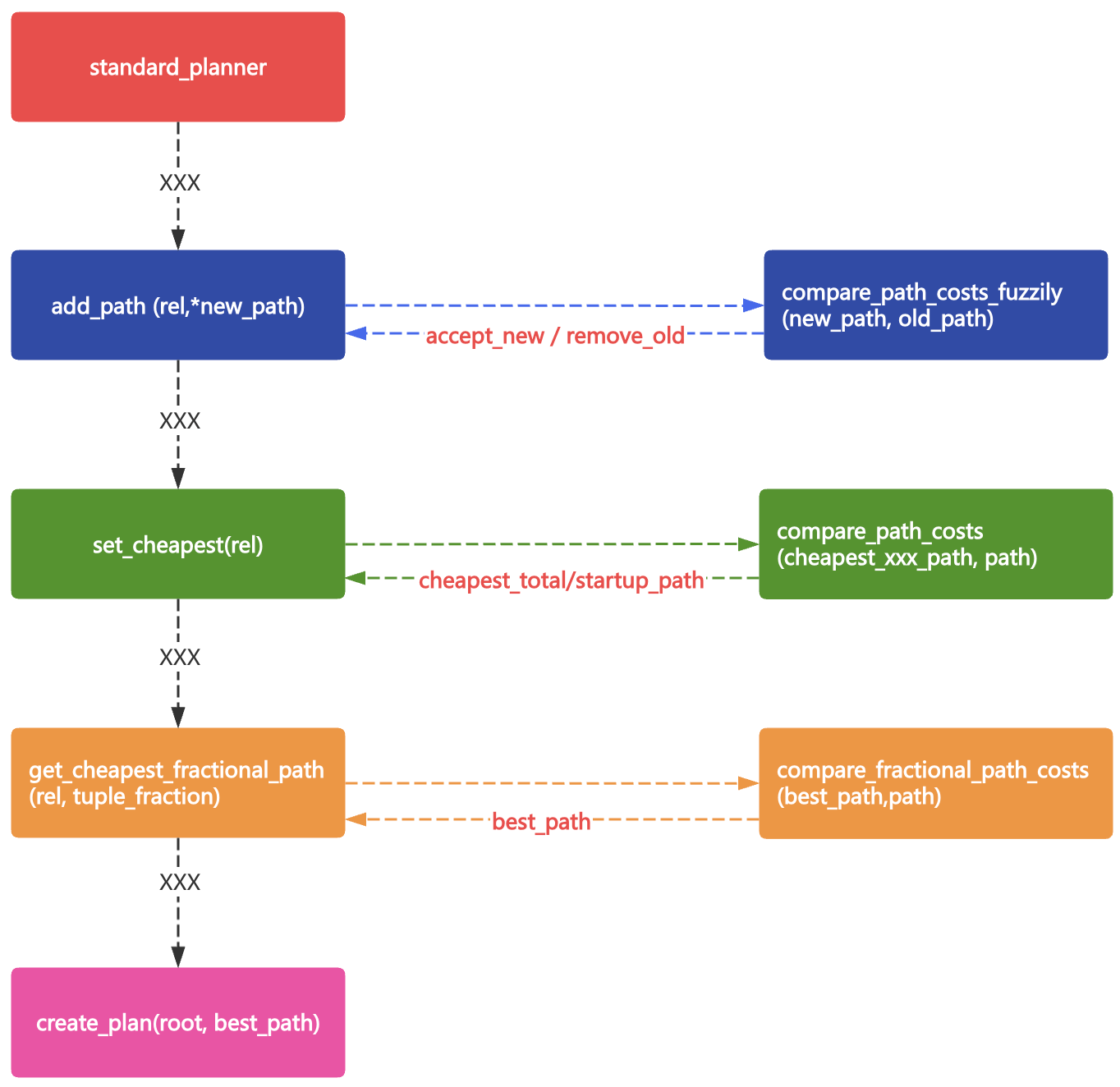
那么这个案例中有没有可能是 Hashjoin 在 Joinpath 环节被“淘汰了”?
Nested Loop (cost=200.01..232.44 rows=1 width=4)
Hash Join (cost=216.13..232.43 rows=1 width=4)
从 cost 来看,两种路径的 cost 比较接近,由于之前研究过这里,我已经大概猜到问题的原因了。
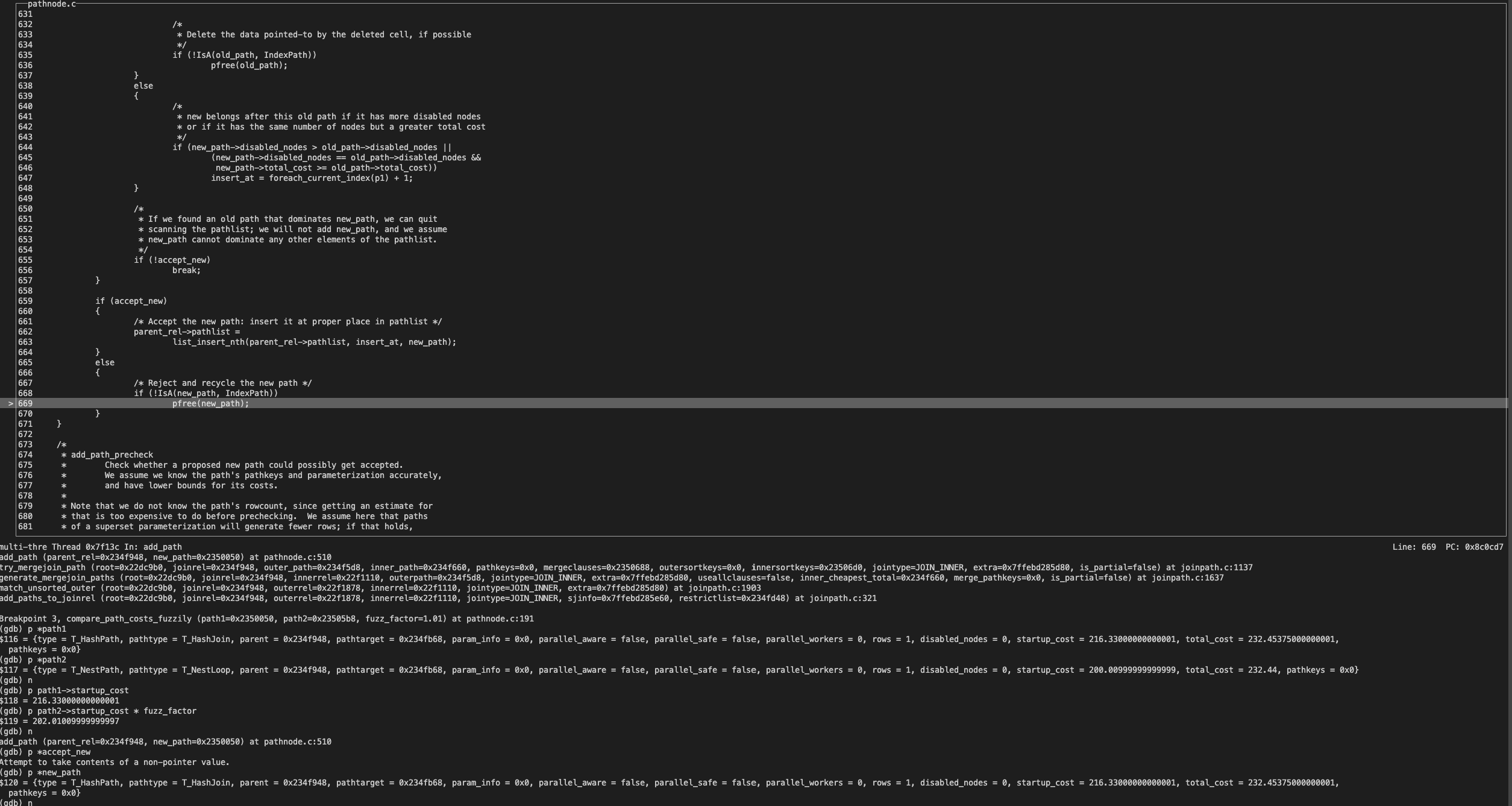
在 add_path 生成路径时,首先使用模糊 cost 比较来决定路径的去留。
cost 模糊比较函数为compare_path_costs_fuzzily
[1]
:
path1 即 new_path 为 HashPath,path2 即 old_path 为 NestPath。
- 首先比较两条路径的 disabled_nodes。
enable_nestloop 和 enable_hashjoin 均为 on,所以 disabled_nodes 均为 0。
-
若未果,再比较 total_cost,并通过模糊系数将路径 cost 提升 1%,和另外一条路径比较。
232.43 > 232.44 _ 1.01 和 232.44 > 232.43 _ 1.01 均不成立,total_cost 模糊近似。
-
若未果,再比较 startup_cost,并通过模糊系数将路径 cost 提升 1%,和另外一条路径比较。
216.13 > 200.01 * 1.01 所以返回 COSTS_BETTER2。
经过比较确定两条路径中更优路径为 NestPath。 那么 HashPath 就被淘汰了,然后进行后续 SORT 和 AGG 节点的 path 生成。
static PathCostComparison
compare_path_costs_fuzzily(Path *path1, Path *path2, double fuzz_factor)
{
#define CONSIDER_PATH_STARTUP_COST(p) \
((p)->param_info == NULL ? (p)->parent->consider_startup : (p)->parent->consider_param_startup)
/* Number of disabled nodes, if different, trumps all else. */
if (unlikely(path1->disabled_nodes != path2->disabled_nodes))
{
if (path1->disabled_nodes < path2->disabled_nodes)
return COSTS_BETTER1;
else
return COSTS_BETTER2;
}
/*
* Check total cost first since it's more likely to be different; many
* paths have zero startup cost.
*/
if (path1->total_cost > path2->total_cost * fuzz_factor)
{
/* path1 fuzzily worse on total cost */
if (CONSIDER_PATH_STARTUP_COST(path1) &&
path2->startup_cost > path1->startup_cost * fuzz_factor)
{
/* ... but path2 fuzzily worse on startup, so DIFFERENT */
return COSTS_DIFFERENT;
}
/* else path2 dominates */
return COSTS_BETTER2;
}
if (path2->total_cost > path1->total_cost * fuzz_factor)
{
/* path2 fuzzily worse on total cost */
if (CONSIDER_PATH_STARTUP_COST(path2) &&
path1->startup_cost > path2->startup_cost * fuzz_factor)
{
/* ... but path1 fuzzily worse on startup, so DIFFERENT */
return COSTS_DIFFERENT;
}
/* else path1 dominates */
return COSTS_BETTER1;
}
/* fuzzily the same on total cost ... */
if (path1->startup_cost > path2->startup_cost * fuzz_factor)
{
/* ... but path1 fuzzily worse on startup, so path2 wins */
return COSTS_BETTER2;
}
if (path2->startup_cost > path1->startup_cost * fuzz_factor)
{
/* ... but path2 fuzzily worse on startup, so path1 wins */
return COSTS_BETTER1;
}
/* fuzzily the same on both costs */
return COSTS_EQUAL;
#undef CONSIDER_PATH_STARTUP_COST
}
debug 做下验证:
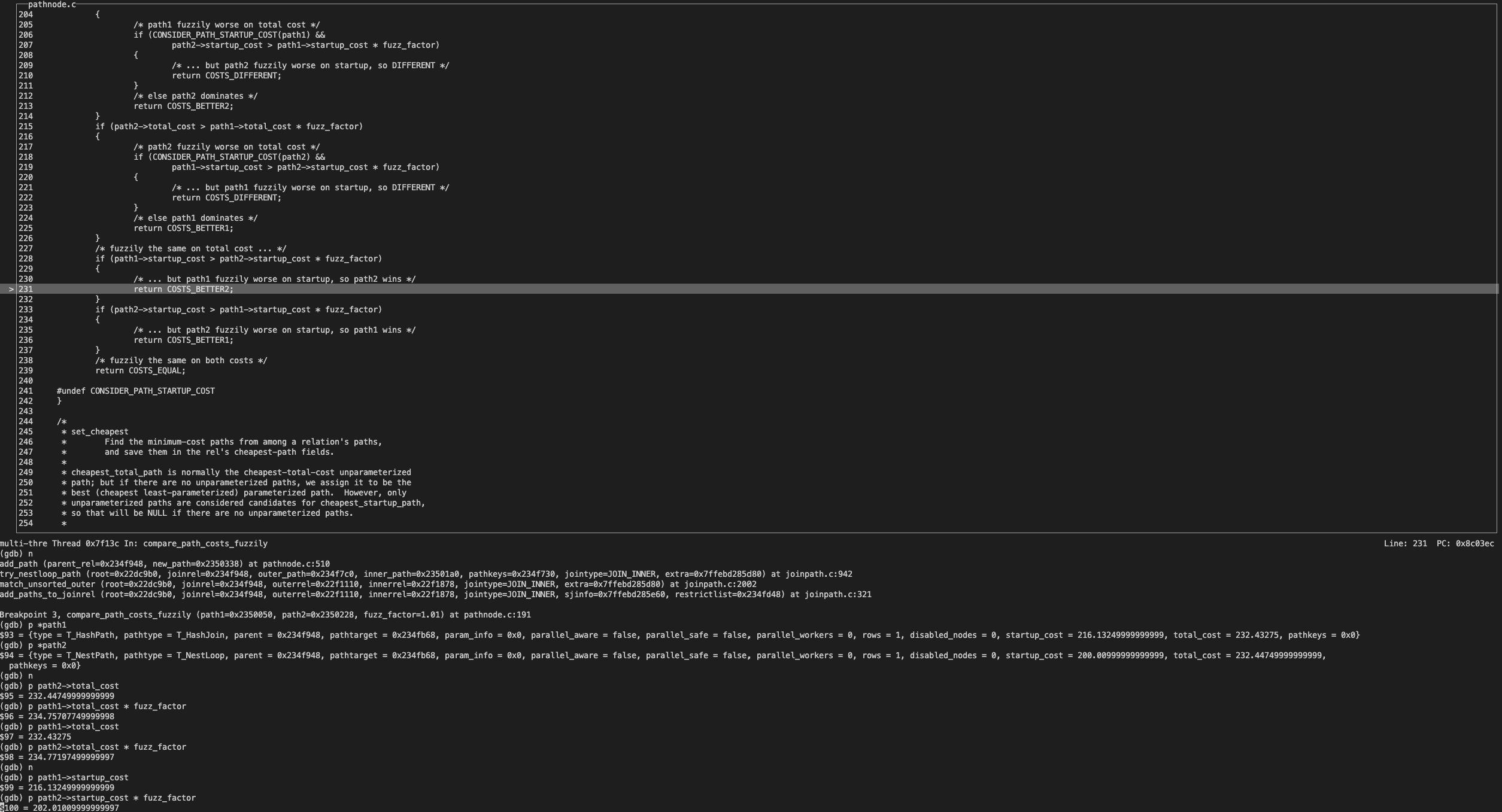
在生成 Joinpath 时,依次生成 MergePath、NestPath、HashPath 并进行 cost 模糊比较。
这里省去 MergePath 和 NestPath 的比较过程,NestPath 胜出。
当生成 HashPath 后,和 NestPath 比较 Total_cost 差异并未达到 1%。而进一步比较 startup_cost,明显差异大于 1%所以返回 COSTS_BETTER2,即 NestPath 胜出。
case COSTS_BETTER2:当前满足 outercmp == BMS_EQUAL 等条件,将 accept_new 置为 false.
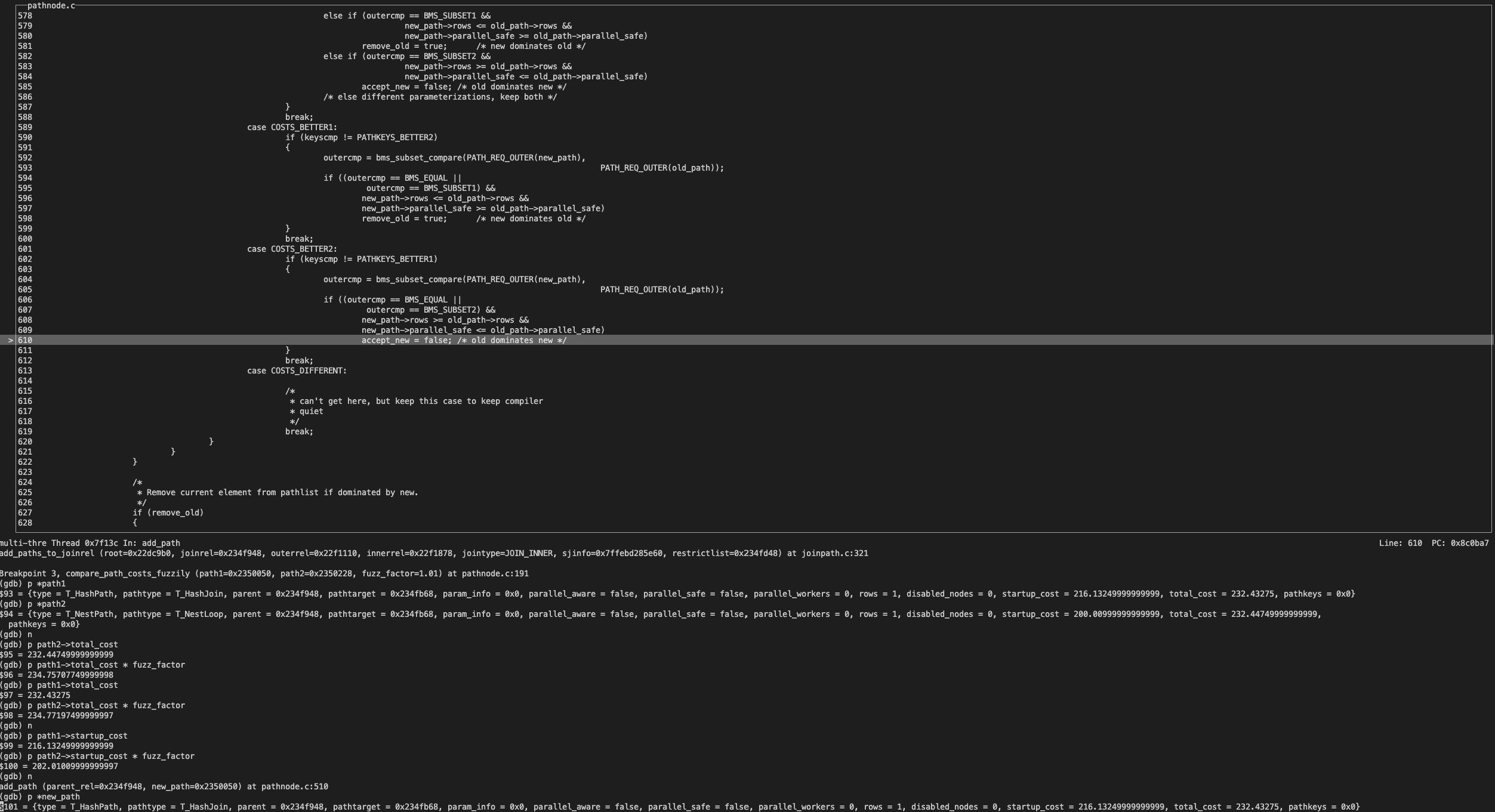
accept_new 为 false,所以拒绝并且回收了 new_path,也就是 HashPath 被淘汰了。
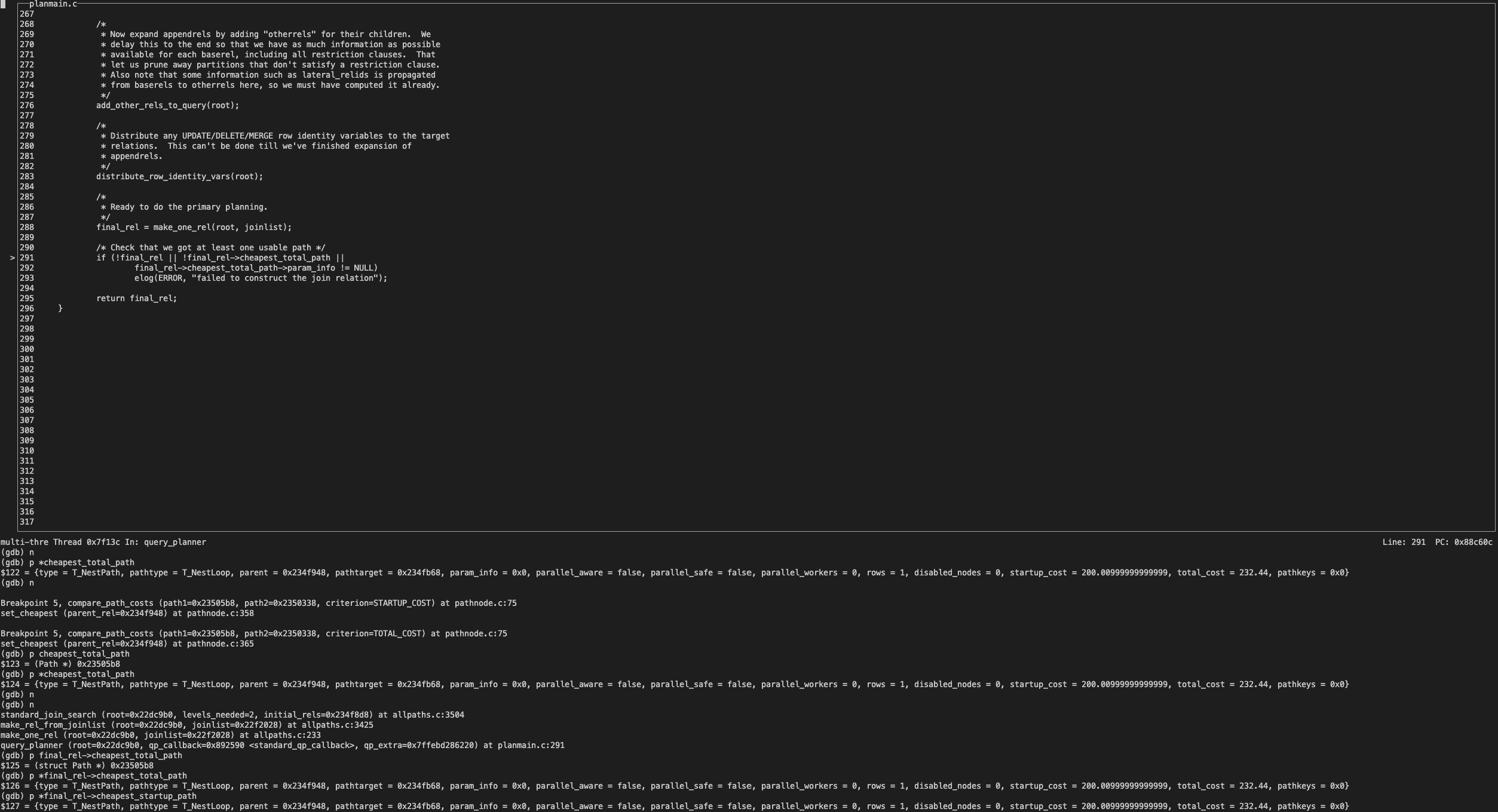
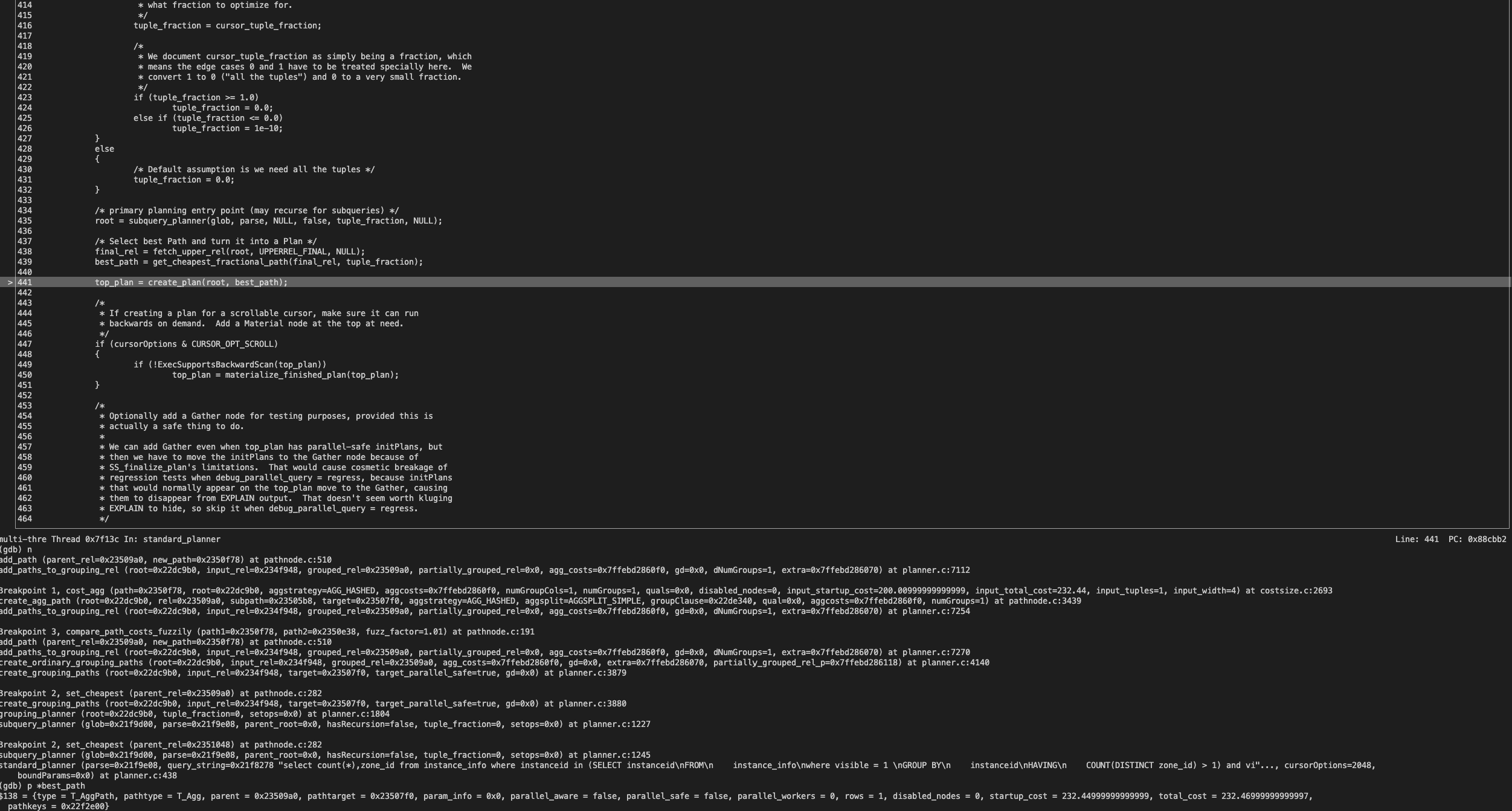
经过 cost 精确比较,角逐出 cheapest_total_cost 和 cheapest_startup_cost 都为 NestPath。
最终,使用 best_path 去生成执行计划。
到这里,大家已经感觉到这个 cost 模糊比较有坑了吧,特别当两条路径的 cost 差别比较小,total_cost 或者 startup_cost 差别小于 1%时,可能会导致选错路径,最终生成了一个次优计划。
STD_FUZZ_FACTOR 默认就是 1.01,是不是可以把它调整得更小,这样就能更精准?但得慎重,这里也是优化器最核心的部分,弄不好真是牵一发则动全身。我觉得这个模糊比较目前看起来不太优雅,甚至后续版本有可能去除这里的逻辑,当然各位有想法的话可以发到社区和 Tom Lane 一众大佬 solo 下。
当然不能指望优化器一直都是最正确的,这是违背现实的,我之前也写了很多篇文章,多次分享相关的内容。
ok,那么为什么这个 case 走了不优计划,大家应该都清楚了。可能已经有朋友看出来还有点小问题,Foreign table 预估扫描 1 行,实际扫描了 2000+行,肯定是统计信息不准啊?
大家思考下 Foreign table 有统计信息吗?
sure,篇幅问题,我简述下原理:Foreign table 只是表映射,没有物理元组,它的统计信息,是通过 fdw 访问目的端表进行采集的。 但是只能手动挡,因为 Foreign table 没法进行 vacuum/autovacuum,需要手动 analyze 触发。
示例的表我做了下 analyze,更新了下统计信息,各种 path 的 cost 差异比较大,默认走了 Hashjoin。
因此,一定要定时收集外表统计信息,不然可能会拖垮整个实例。
小结
本篇我们分析了一例执行计划跑偏的根本原因,从中看得到当路径间的 cost 接近时(1%以下),可能在 add_path 时 cost 模糊比较中会选择次优路径,生成不优计划。
当然遇到这样的场景可以尝试各种 hint 手段去干预,不过可以考虑利用强化学习来实现自动化的 hint 干预,让数据库自动管理执行计划。我在之前的文章《AI4DB 试玩-Bao/Balsa 适配 PG18》中研究过类似的模型,并在 PCC2025 大会中做了分享。
当然专业的事要专业的人来做,我们的好友崔鹏博士已有相关的 AI4DB 课题研究和落地,将会在 HOW2026 大会中与大家见面,敬请期待。
HOW 2026 议题招募中
2026 年 4 月 27-28 日,由 IvorySQL 社区联合 PGEU(欧洲 PG 社区)、PGAsia(亚洲 PG 社区)共同打造的 HOW 2026(IvorySQL & PostgreSQL 技术峰会) 将再度落地济南。届时,PostgreSQL 联合创始人 Bruce Momjian 等顶级大师将亲临现场。
自开启征集以来,HOW 2026 筹备组已感受到来自全球 PostgreSQL 爱好者的澎湃热情。为了确保大会议题的深度与广度,我们诚邀您在 2026 年 2 月 27 日截止日期前,提交您的技术见解。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号