
机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法。无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻域。如果是工业上常用的6自由度机器人,那么就有2^6邻域。。。。。。显然,对于轨迹规划这种串行算法而言,这么高维度的搜索空间是不合适的.......于是就有了牺牲精度,鲁棒性,但是效率较高的基于采样的轨迹规划算法。PRM(probabilistic road map)。使用PRM生成稀疏的路径图,再利用A*算法在路径图中进行轨迹规划,则可以显著提高效率。
1、生成永久map的PRM算法
PRM算法的伪代码如下:

其中Dist function 是计算Configuration Space中,点与点之间距离的函数。Local Planner 是检查点与点连线是否在Configuration Space 中经过非自由区域的函数。
此算法的本质是蒙特卡洛算法。所以原本很容易在GPU上实现并行化。最大的困难还是处于非自由区域检查部分...
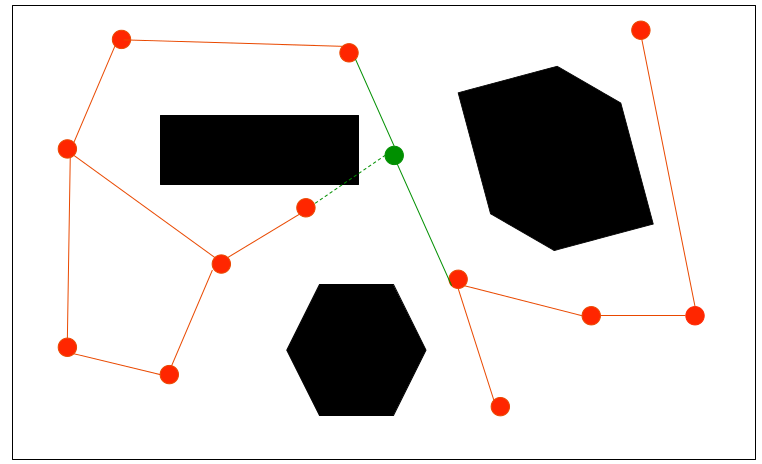
绿色的点为随机采样点。
2、在空间中生成一次性路径的 RRT 算法
很多时候,我们并不需要生成一整个可以反复使用的map ,我们更需要在空间中寻找到一条可以移动的路径。比如,无人汽车从A到B ,我们只需要生成一次路径即可,回头时障碍物可能已经发生变化。这时候我们使用RRT算法。


其root 为起点与终点,只要最后两棵树可以合并,那么则找到了起点到终点的路径

 浙公网安备 33010602011771号
浙公网安备 33010602011771号