An Investigation of Model-Free Planning
发表时间:2019(ICML 2019)
文章要点:这篇文章主要是做实验探讨了一下什么形式算planning。之前的planning通常会设置一个具体的planning算法,比如Monte Carlo rollouts,MCTS等等,或者在网络里面嵌入类似planning的结构,比如VIN,ATreeC之类的。作者想说,其实不需要去设计这些具体的planning,直接就像LSTM这些带有时序关系的网络就能展现出planning的特性了。
具体的,作者首先定义什么是planning。不像经典的planning的定义方法,planning需要有一个look-ahead机制之类的,作者认为重要的不是设计这个机制,而是planning带来的预见性(foresight)。作者认为的planning,是generalize能力强(First, an effective planning algorithm should be able to generalize with relative ease to different situations),能从少量样本中有效学习(Second, a planning agent should be able to learn efficiently from relatively small amounts of data),充分利用时间限制(Third, an effective planning algorithm should be able to make good use of additional thinking time.)。说白了,只要你效果好,你就是planning,我根本不care你到底有没有具体的planning机制。
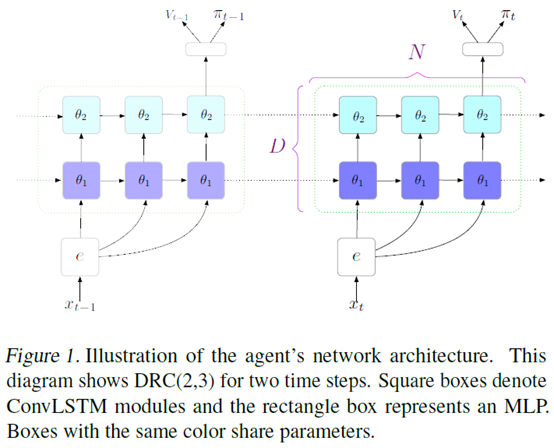
然后作者就直接搞了ConvLSTM结构(Repeated ConvLSTM (DRC) network architecture),通过堆不同的时序结构的深度和宽度来做实验。然后就说,这也是planning,而且效果不错。
总结:标题取得很大很好,内容感觉配不上标题。
疑问:这个都能ICML,不知道是哪里被reviewer认可了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号