
西安电子科技大学week01-状态空间表示及其问题解决
1,盲目搜索
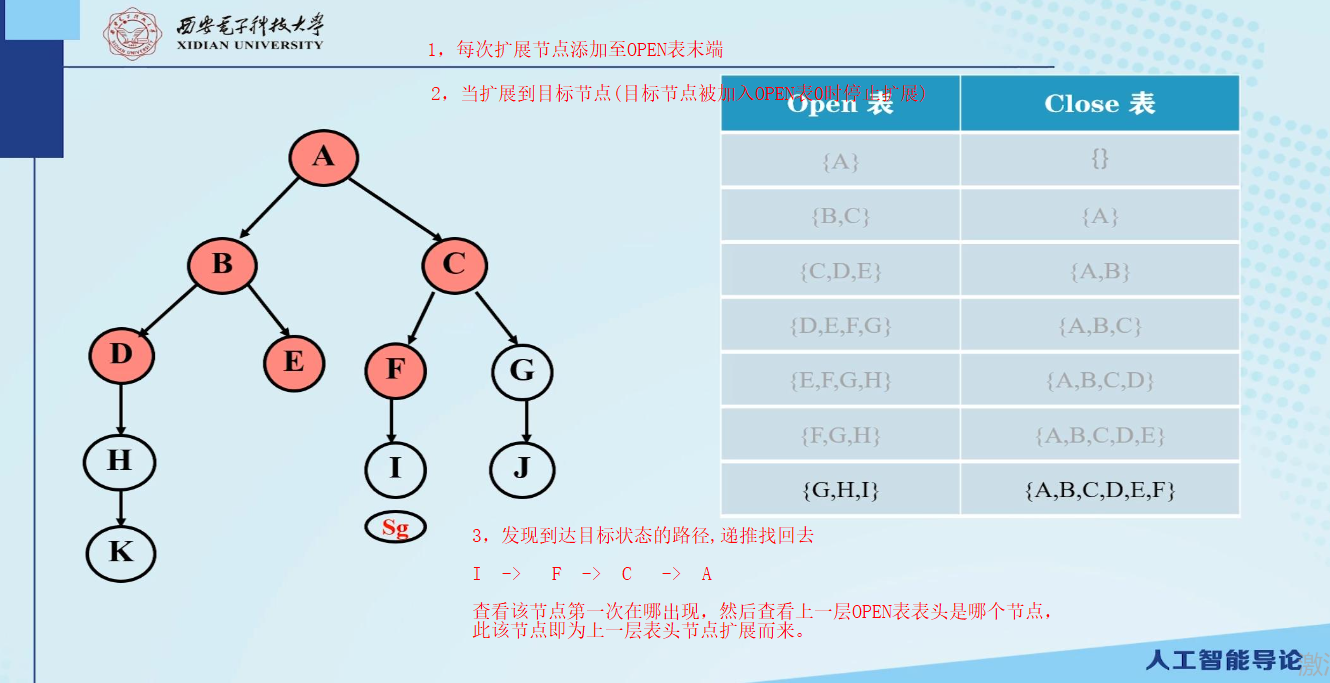
1.1 宽度优先搜索
基本思想:
-
-
- 扩展初始节点
- 扩展初始节点的所有后继节点
- 扩展后继节点的后继节点
- 第n层结束,不可能到n+1层
-
要点:
-
-
- 新扩展节点放于OPEN表末端
- 问题有解时,一定可以找到
- 方法具有通用性
- 数据规模大时,搜索效率低
-
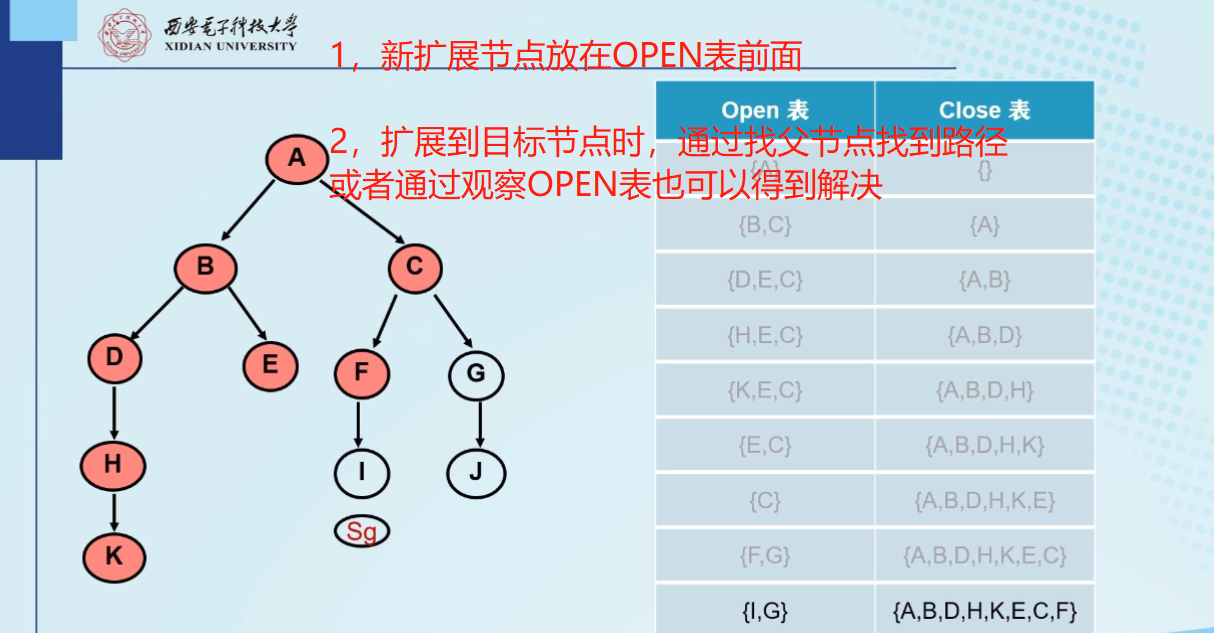
1.2 深度优先搜素
基本思想:
-
-
- 总是扩展当前节点的最深节点
- 一直扩展直到到达最深层,直至没有下一层
- 回退到上一个还有未扩展后继节点的上层继续扩展
-
深度的定义:起始节点深度为0;
任何其他节点的深度为d=d(父)+1
要点:
-
-
- 不能保证最优解
- 存在无穷分支时可能不能找到解(此时可以借助深度界限解决,一些问题上极为重要)
-
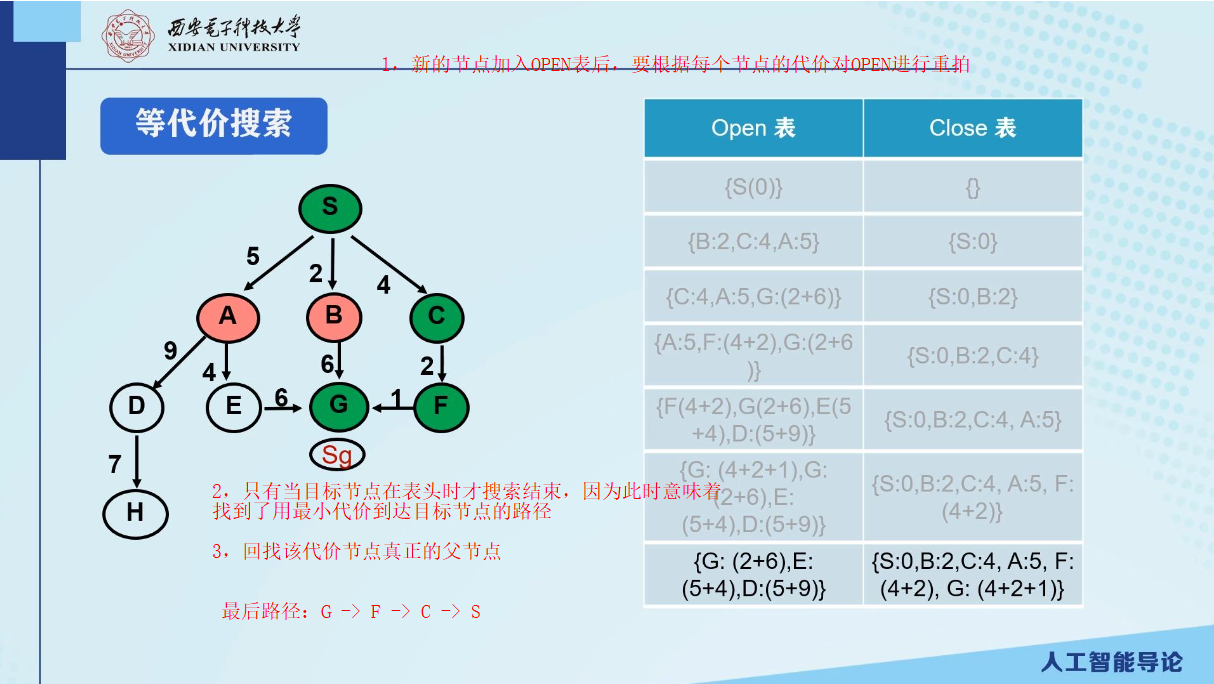
1.3 等代价搜索
基本思想:属于宽度优先的拓展,此时不沿着等长度路径断层扩展,沿着等代价路径断层扩展
等代价的定义:
- g(n)表示从初始节点到当前节点n的代价
- c(n1,n2)表示从父节点n1到其子节点n2的代价
- g(n2) = g(n1) + c(n1,n2)
要点:每次扩展代价最低的节点,依据代价对OPEN表中元素进行排序。只有当目标节点位于表中第一个节点时搜索结束。
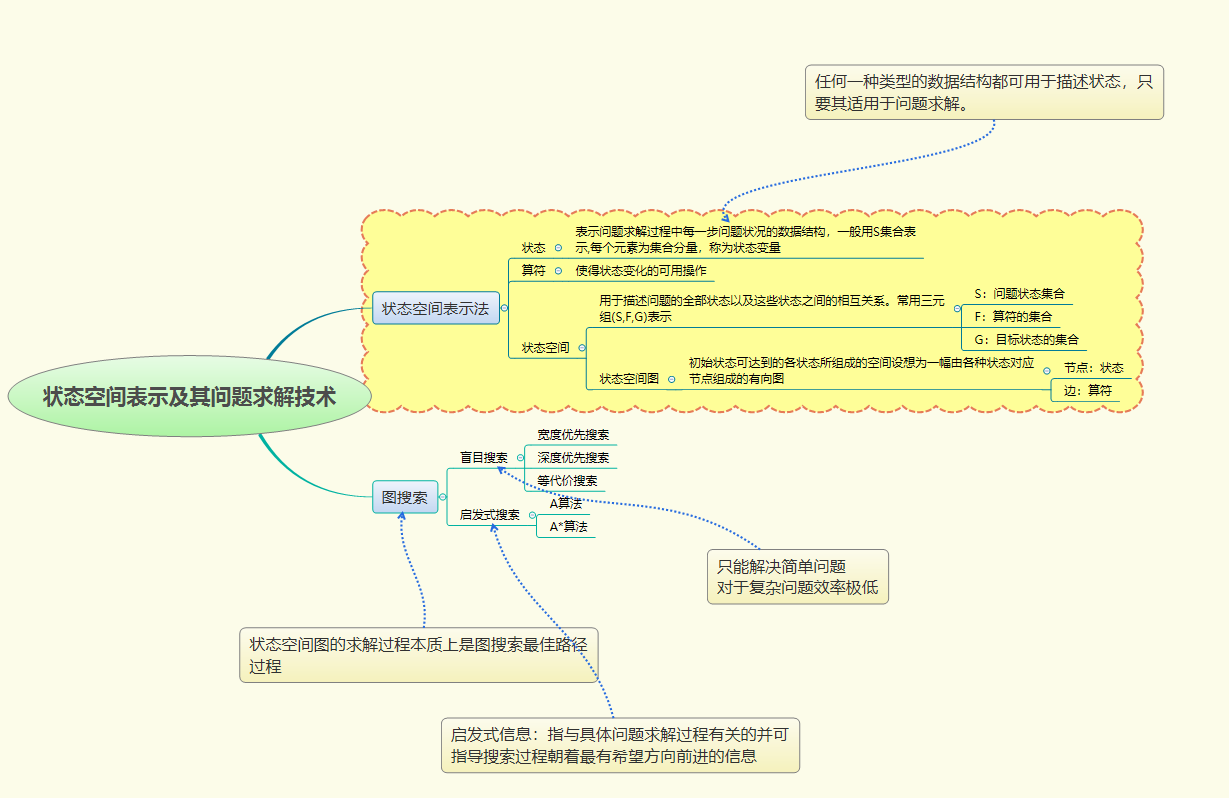
2,启发式搜索
启发信息:见上图中解释
评估函数:作为启发信息,对当前搜索状态评估,根据函数值对OPEN重排,直接扩展最有希望节点。
f(n) = g(n) + h(n)
g(n)表示从起始节点到当前节点的代价
h(n)表示从当前节点到目标节点的代价
2.1 A算法
局部择优算法(瞎子爬山算法)
- 要点:用f(n)算出每个子节点的估价,根据该估价对OPEN表进行重排,只对扩展节点这一部分重排,估价越小排在越前面。
全局择优算法(全局择优算法)
- 要点:用f(n)算出每个子节点的估价,根据该估价对OPEN表进行重排,对OPEN中所有节点进行重排,估价越小排在越前面。
2.2 A*算法
- 背景:A算法不确定能保证找到最优估价函数,A*算法在A算法的基础上添加一点小改动,使得估价函数能够使最佳,从而找到最佳路径、
- f(n) = g(n) + h(n)
在A算法的基础上,g(n)>0 , h(n) 是 h*(n) 的下界,即对于任意n , h(n) < =h*(n) , 在满足h(n) < =h*(n)的条件下,h(n) 越大越好。
h(n) = 0时,则等价为等代价算法。
3,例题理解
宽度优先
深度优先
等代价
启发式搜索可以解决结构比较复杂的问题,不大方便截图

 浙公网安备 33010602011771号
浙公网安备 33010602011771号