

下载对应的livox_viewer,下载代码如下:
wegt -c https://terra-1-g.djicdn.com/65c028cd298f4669a7f0e40e50ba1131/Download/update/Livox_Viewer_For_Linux_Ubuntu16.04_x64_0.10.0.tar.gz
连接雷达,使用电源适配器,通过网线进行连接,具体配置如下图
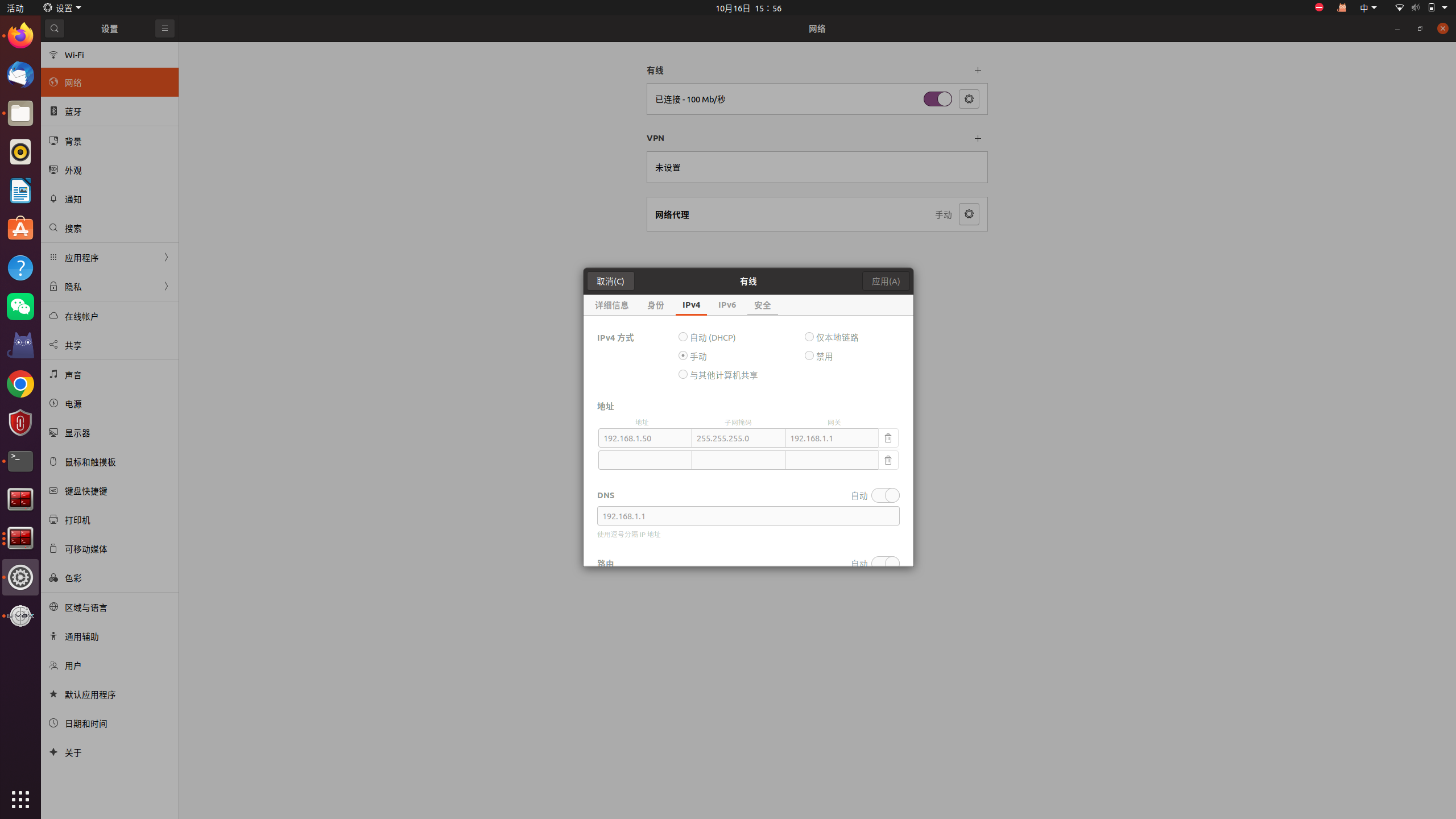
需要注意的是,ip的优先级需要额外设置,否则livox_viewer软件可能无法识别到有线连接(仅为可能出现)
设置优先级
1.查看所有网络连接名称:
nmcli connection show
2.调整优先级:
sudo nmcli connection modify "有线连接 1" connection.autoconnect-priority 100
(上述例子中我的有线连接 1(注意空格)是对应连接雷达的端口)
同时为了防止冲突,也需要修改无线连接的优先级:
sudo nmcli connection modify "wireless" connection.autoconnect-priority 50
3.重启网络服务:
sudo systemctl restart NetworkManager
4.验证:
#查看有线连接的优先级
nmcli connection show "有线连接 1" | grep autoconnect-priority
#查看无线连接的优先级
nmcli connection show "wireless" | grep autoconnect-priority
启动软件
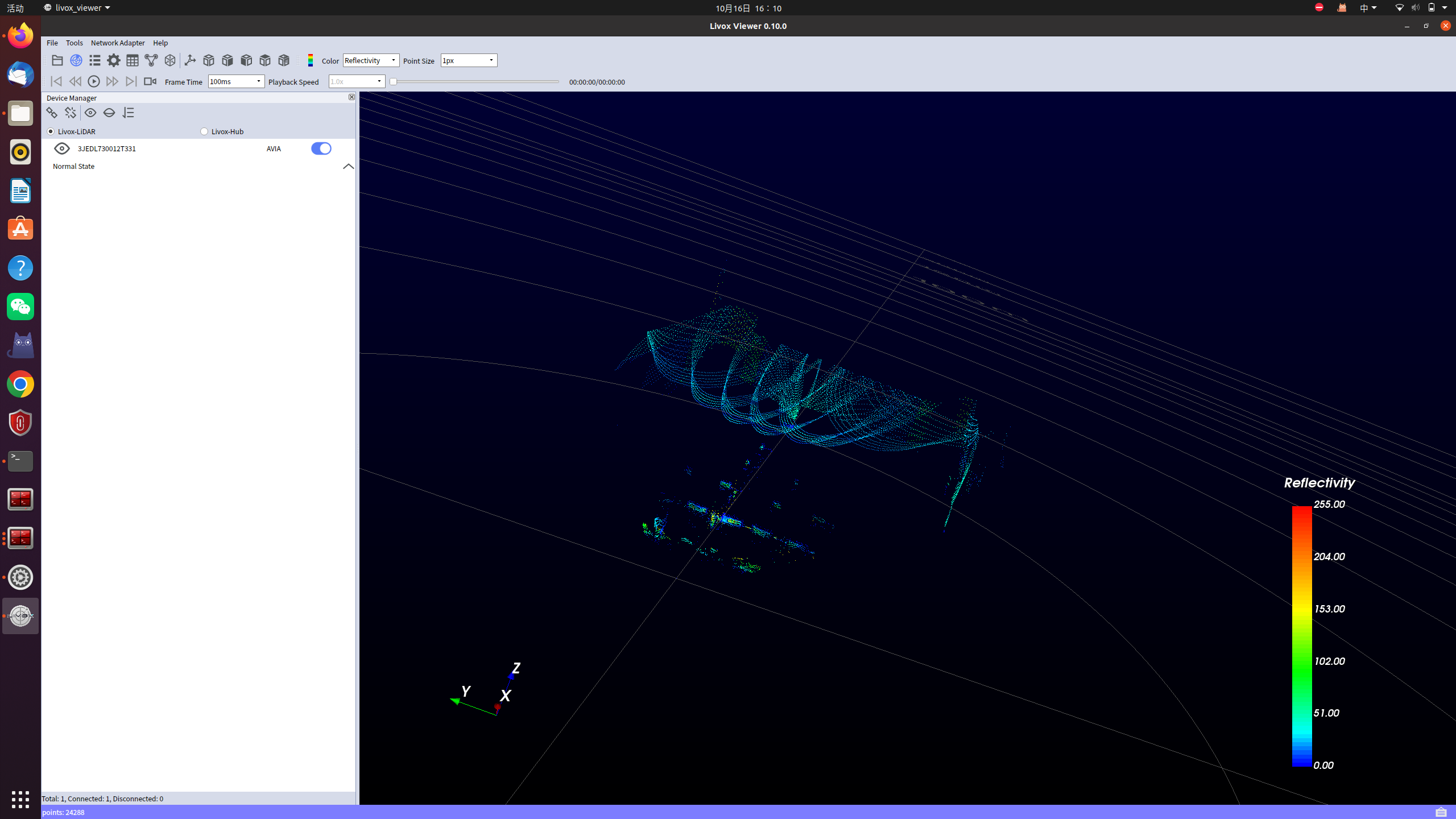
可以发现已经成功连接

 浙公网安备 33010602011771号
浙公网安备 33010602011771号