
小熊派开发实践丨漫谈LiteOS之传感器移植
摘要:本文基于小熊派开发板简单介绍了如何在LiteOS中移植传感器,从而实现对于传感器的相关控制。
1 hello world
相信大家无论在学习编程语言开始的第一个函数应该是HelloWorld,本文将从hello_world_demo为大家介绍如何实现传感器的移植工作。
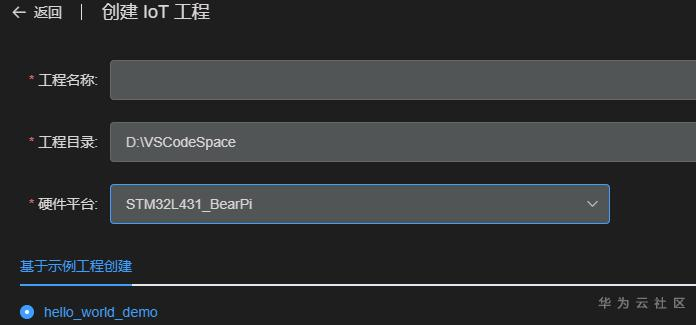
首先我们创建HelloWorld工程,选择STM32_BearPi → hello_world_demo,工程名称可以自定义。
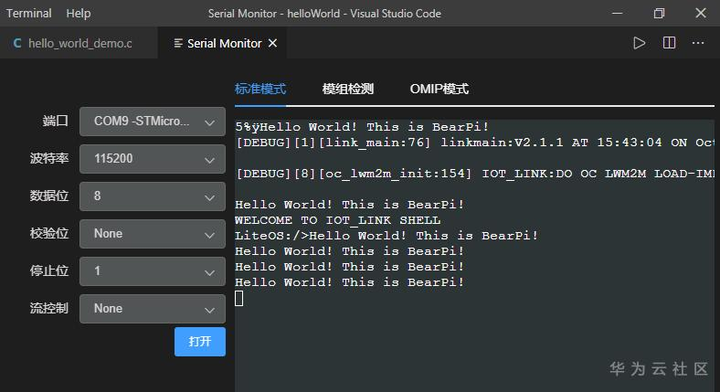
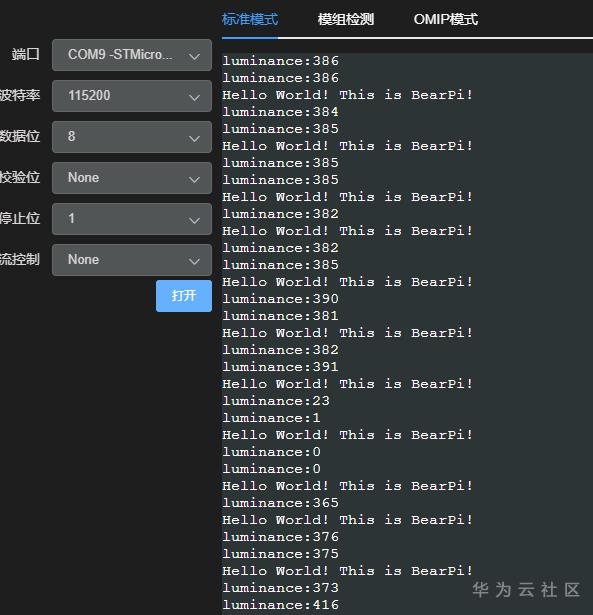
创建之后我们点击编译,然后烧录到开发板,打开VSCode-IoTLink的串口,并按照图中进行设置串口连接参数,之后按键Reset,可以看到串口打印如下图所示。
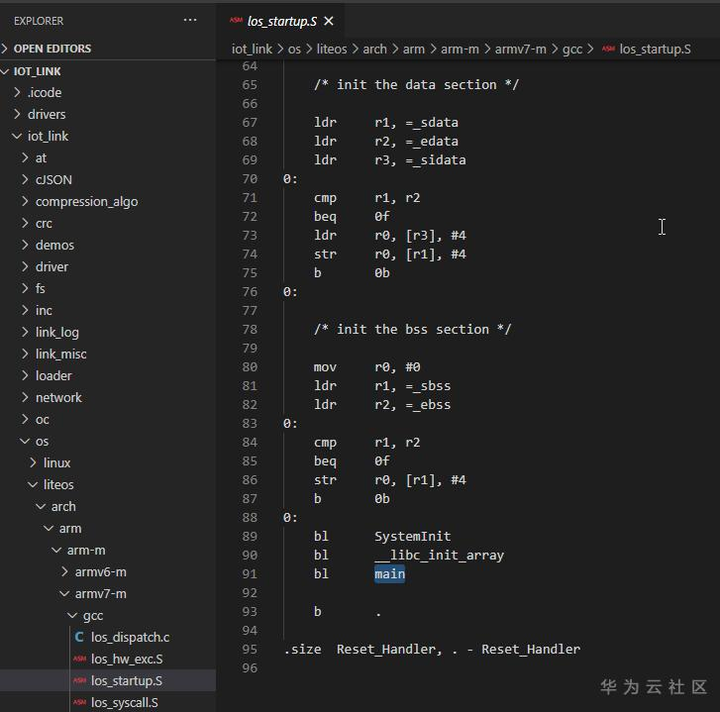
首先来介绍一下代码运行的简单流程,之前在漫谈LiteOS系列中介绍过LiteOS 的启动流程,我们知道在程序下载到开发板之后,首先会按一下Reset按键进行开发板的启动,因此在开发板上电之后执行的第一个函数就是ReSet_Handler函数。
首先找到对应的启动文件los_startup.S 文件(根据使用的操作系统以及板子MCU系列查找文件目录),可以看到其由汇编语言编写,具体启动流程在漫谈LiteOS系列中已经介绍过,这里只看低91行,运行到main函数,接下来程序将从main函数开始执行。
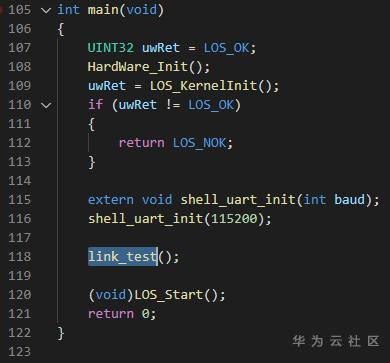
接下来看main函数,在main函数中,从硬件初始化到内核初始化,之后初始化串口,再到link_test()函数,在该函数中创建了一个任务,其入口函数为Link_main函数。
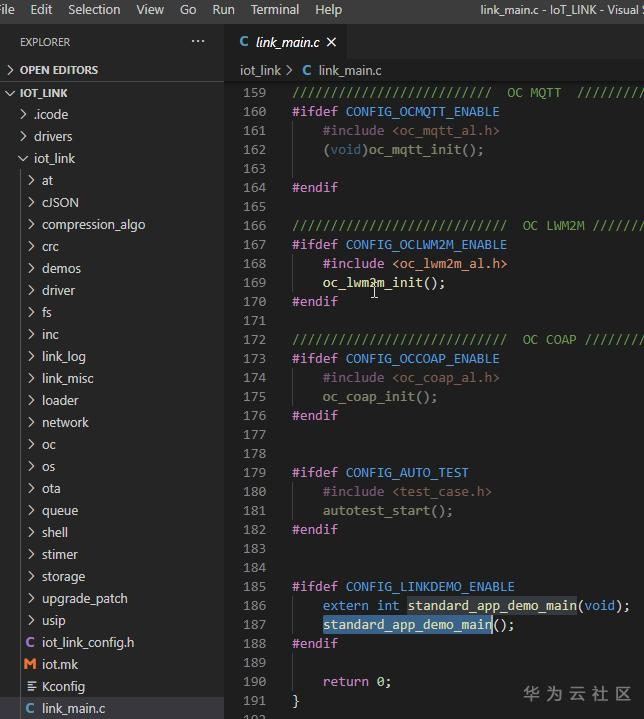
在Link_main函数的最后调用了一个函数为standard_app_demo_main(),根据IDE查找我们可以看到,在项目中存在大量的该同名函数,那么编译器如何知道具体执行的是哪一个呢,可以看到.config文件中的user_demo宏定义使能的是hello_world_demo,因此执行的是hello_world_demo中的standard_app_demo_main()函数,从而根据其内部创建的任务以及入口函数实现了打印Hello World! This is BearPi!。接下来我们进行传感器的移植。
2 传感器移植
首先我们可以看到在该LiteOS代码中已经包含了大量的传感器代码,这里以E53_SC1为例,当然这些传感器已经和BearPi开发板已经适配好,如果您想使用自己特定的传感器,可以首先将传感器与开发板进行一定的移植,包括引脚以及GPIO的绑定等等。
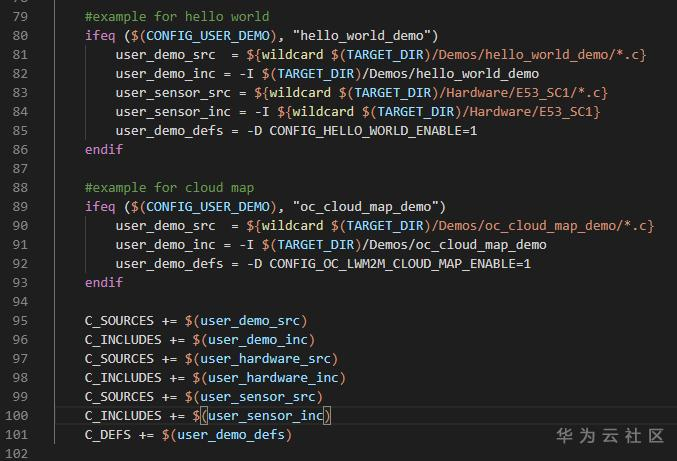
首先需要将传感器文件路径添加到编译路径中,以使得编译器可以找到该代码,在userdemo.mk中配置传感器文件的相关路径,在该文件中找到hello_world_demo部分添加文件路径。具体如下图83-84行,接着在源文件和头文件变量中添加自定义的变量,user_sensor_src和user_hardware_inc,当然这里如果您直接定义名称为编译路径中已经存在的user_hardware_src和user_hardware_inc,则无需添加相关代码。
首先我们需要添加传感器头文件到helloworld_demo.c中,以实现后面的相关函数调用。
#include "E53_SC1.h"之后调用结构体,以便后续打印数据。
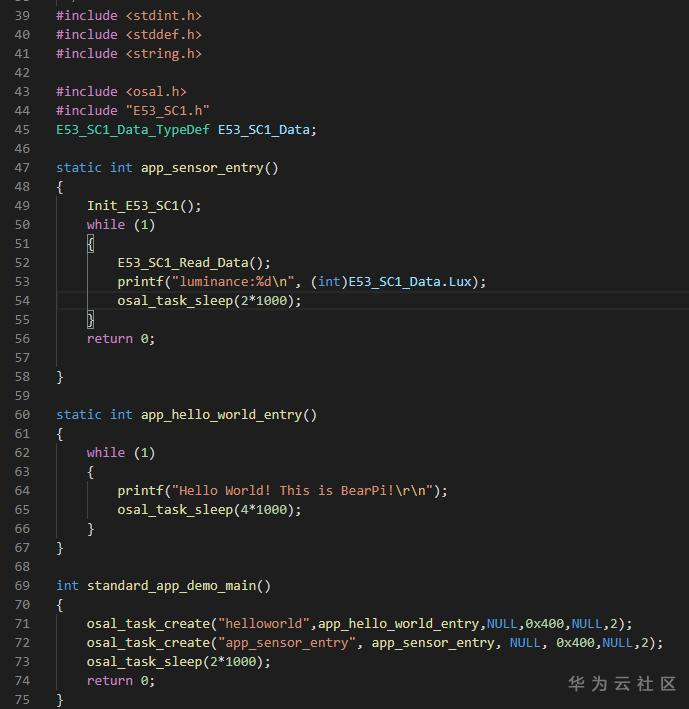
E53_SC1_Data_TypeDef E53_SC1_Data;然后在hello_world_demo.c文件中,添加传感器数据的任务函数。
static int app_sensor_entry()
{
Init_E53_SC1();
while (1)
{
E53_SC1_Read_Data();
printf("luminance:%d\n", (int)E53_SC1_Data.Lux);
osal_task_sleep(2*1000);
}
return 0;
}在主函数中创建传感器任务函数。
osal_task_create("app_sensor_entry", app_sensor_entry, NULL, 0x400,NULL,2);
osal_task_sleep(2*1000);具体如下图
之后我们编译烧录,通过串口验证一下传感器的移植是否正确。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号