
Kalman滤波在重力匹配中的应用
1. Kalma滤波学习笔记
卡尔曼滤波包括预测和量测更新两个部分。
以汽车运动为例分析,其运动模型为:
Xk=Fk-1Xk-1+Gk-1Uk-1+wk-1
U表示输入的控制量,w表示噪声。
量测模型为:
yk=HkXk+vk
噪声特性为wk~N(0,Qk), vk~N(0,Rk)。
预测部分:
量测更新部分:
2. 惯性导航系统
在惯性导航系统中,加速度计和陀螺仪分别测量载体的加速度和角速度,通过积分的方法解算得到载体的位置、速度和姿态信息。
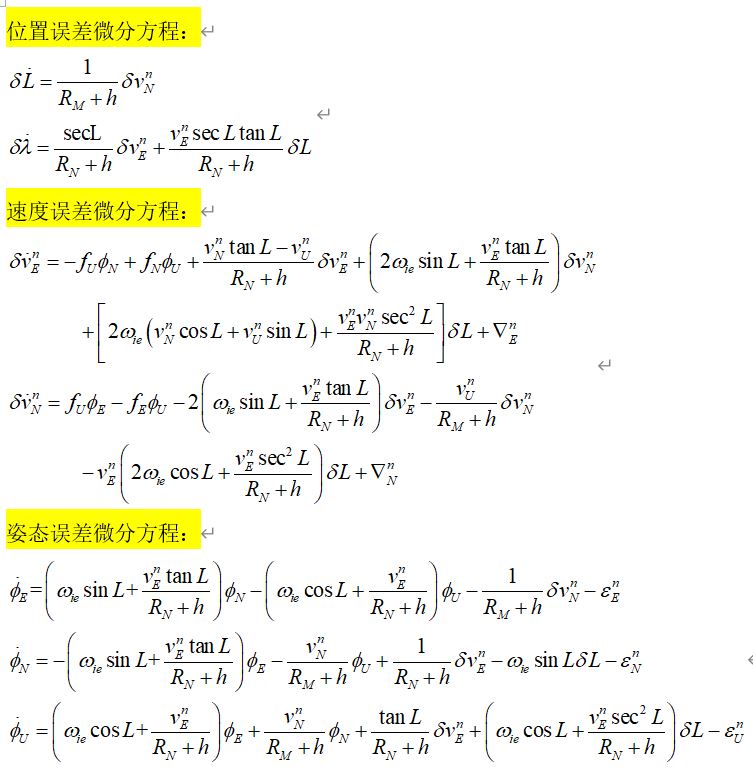
考虑姿态误差角小、高度不变的情形,惯性导航系统的位置误差、速度误差和姿态误差微分方程分别为:
3. 扩展卡尔曼滤波
选择状态变量为:

系统滤波方程为:

其中连续时间的状态转移矩阵F由INS误差微分方程决定,W为系统过程噪声方差阵,考虑由加速度计和陀螺仪的随机误差组成。
选择系统的量测量为INS测量位置对应重力图上的重力异常值与实测重力异常值之差,

其中INS下标表示惯性导航系统测量的位置在重力图中对应的重力异常值,G下标表示实际重力仪测得的重力异常值,gg和m下标和分别表示重力图的误差和重力仪的测量误差,V代表系统观测噪声,由重力仪测量随机误差构成。
上式化简得到,

式中求偏导分别代表重力异常值在纬度和经度方向上的梯度,H代表系统量测矩阵。其中梯度可通过局部线性化方式求取,对重力图局部区域拟合为经度和纬度的二阶多项式曲面,并求梯度,得到量测矩阵。
将状态方程与量测方程的非线性部分进行离散化:

其中T为卡尔曼滤波周期,Fk和Qk表示第k时刻的状态转移矩阵与系统过程噪声方差矩阵的取值。
(具体推导过程见:https://blog.csdn.net/l2014010671/article/details/91126676?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-2.nonecase&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-2.nonecase)
得到卡尔曼滤波递推方程如第一节中所述。由于INS测量频率高于重力仪测量频率,因此当有重力仪的量测值时,卡尔曼滤波器进行量测更新;否则,仅进行时间更新。量测更新之后,对INS的位置、速度和姿态进行修正。
部分主程序MATLAB代码如下所示:
%% 惯性导航初始化 % 位置 delta_pos=gv.delta_pos/glv.nm/gv.weight; % 初始位置误差(单位:弧度) pos = location0 +delta_pos;%载体的初始位置【纬度;经度;高度】 H_ini = pos(3); %初始高度 pos_1 = pos; %前一时刻位置 pos_2 = pos; %前两个时刻位置 % 速度 vn = velocity0+gv.delta_velocity*ones(3,1); vn_1 = vn; %前一时刻速度 vn_2 = vn; %前两个时刻速度 dRnm_1 = zeros(3,1); %前一时刻位置增量 dRnm_2 = zeros(3,1); %前两个时刻位置增量 % 姿态 att0=(angle0/glv.deg)'; % 初始姿态(单位:度) delta_att=gv.delta_att; % 初始姿态误差 att0=att0+delta_att'; qnb = AttToQuat(att0*pi/180); %姿态矩阵 %% 滤波器初值 % 状态变量为: 位置2个,速度2个,姿态3个,加速度计2个,陀螺3个,共12个 dpos0=delta_pos(1:2)'; % 位置初始误差 dvn0=gv.delta_velocity*[1;1]; % 速度误差初值,单位为m/s datt0=gv.delta_att'*glv.deg; % 姿态误差初值,单位为弧度 %IMU误差 db=gv.Fe_chang*ones(2,1)*glv.ug; % 加速度计误差初值,单位为ug eb=gv.We_chang*ones(3,1)*glv.dph; % 陀螺误差初值 wdb=gv.Fe_randn*ones(2,1)*glv.ug; % 加速度计随机误差,单位为ug web=gv.We_randn*ones(3,1)*glv.dph; % 陀螺随机误差 %滤波器初值 Pk=diag([dpos0';dvn0;datt0';db;eb])^2; % 初始误差阵 Qt =diag([zeros(2,1);wdb;web;zeros(5,1)])^2; % 系统状态误差方差阵 Xk =[dpos0,dvn0',datt0,db',eb']'; %状态变量初值,列 Rk=gv.g_noise^2; % 系统观测误差方差阵(由重力仪测量随机误差构成) Xkf=zeros(L/4,nn); Hk=zeros(1,12); %% -----------导航计算-------------------- hwait = waitbar(0,'Please wait...'); %进度条 kk=1; % 解算标号 kkk=1; km=1; for k=1:n:L-n+1 k1=k+n-1; fmm=fm(k:k1,:)'; %四子样数据,比力 wmm=wm(k:k1,:)'; %角速度 [qnb, vn, pos, dRnm] = sinsQuat(qnb, vn_1, vn_2, pos_1, pos_2, dRnm_1, dRnm_2, wmm, fmm, Ts); %导航程序 Ft=get_F12(vn, pos, mean(fmm,2)); %获得INS状态转移矩阵 [Phikk_1, Qk] =kfdis(Ft, Qt, T_Kalman, 12); % 离散化得到一步转移矩阵和系统噪声矩阵 if mod(kk,interval)==0 % 得到观测值 % 观测模型 [Hk(1:2),m,s]=get_H(3,pos(1),pos(2)); % 拟合范围,纬度,经度,得到量测矩阵H Hk(3:12)=zeros(1,10); H_s(kkk)=s; H_m(kkk)=m; kkk=kkk+1; % 观测值 pnum=find_num2(pos(1:2)*gv.weight); g_ins=z2(pnum(2),pnum(1)); point=[Storedata.avp(k1,7) Storedata.avp(k1,8)]*gv.weight; pnum=find_num2(point); g_true=z2(pnum(2),pnum(1))+gv.g_noise*rand(1,1); Zk=g_ins-g_true; % 背景图重力异常值减去测量值 % Kalman [Xk, Pk] = kalman(Phikk_1, Qk, Xk, Pk, Hk, Rk, Zk); %有测量,更新 % -----------------------------闭环修正---------------------------- if nn>1 pos(1:2)=pos(1:2)-Xk(1:2); % 位置反馈 end if nn>3 vn(1:2)=vn(1:2)-Xk(3:4); % 速度反馈 end if nn>4 Cnb=(eye(3)+askew(Xk(5:7)))*QuatToAttMat(qnb); % 修正姿态矩阵 Cnb=Cnb*(Cnb'*Cnb)^(-1/2); qnb = AttmatToQuat(Cnb); end Xk(1:nn)=zeros(nn,1); else [Xk, Pk] = kalman(Phikk_1, Qk, Xk, Pk); %状态更新 end %----------------------- 记录数据 ---------------------- Xkf(kk,:)=Xk(1:nn); INS_data_k(kk,1)=pos(1); INS_data_k(kk,2)=pos(2); INS_data_k(kk,3)=vn(1); INS_data_k(kk,4)=vn(2); Att = QuatToAtt(qnb); % 姿态输出 INS_data_k(kk,5:7)= Att'; kk=kk+1; vn(3) = 0; % 天向抑制 pos(3) = H_ini; % 抑制高度通道 vn_2 = vn_1; vn_1 = vn; pos_2 = pos_1; pos_1 = pos; dRnm_2 = dRnm_1; dRnm_1 = dRnm; %----------------------- 记录数据 --------------------------------- waitbar(k/L); end close(hwait)
离散化卡尔曼滤波:
function [Fikk_1, Qk] = kfdis(Ft, Qt, Tkf, n) Tkfi = Tkf; facti = 1; Fti = Ft; Mi = Qt; In = eye(size(Ft,1)); Fikk_1 = In + Tkf*Ft; Qk = Qt*Tkf; for i=2:1:n Tkfi = Tkfi*Tkf; facti = facti*i; Fti = Fti*Ft; Fikk_1 = Fikk_1 + Tkfi/facti*Fti; FtMi = Ft*Mi; Mi = FtMi + FtMi'; Qk = Qk + Tkfi/facti*Mi; end
卡尔曼滤波:
function [Xk, Pk] = kalman(Phikk_1, Qk, Xk_1, Pk_1, Hk, Rk, Zk) if nargin<7 % 仅进行状态递推 Xk = Phikk_1*Xk_1; Pk = Phikk_1*Pk_1*Phikk_1'+Qk; else % 有测量时滤波 Xkk_1=Phikk_1*Xk_1; Pkk_1 = Phikk_1*Pk_1*Phikk_1' + Qk; Pxz = Pkk_1*Hk'; Pzz = Hk*Pxz + Rk; Kk = Pxz*Pzz^-1; Xk = Xkk_1 + Kk*(Zk-Hk*Xkk_1); Pk = Pkk_1-Kk*Hk*Pkk_1; end end
获得量测矩阵(重力在经纬度方向上的梯度):
function [h,m,s]=get_H(n,fai,lamda)
h=zeros(1,2);
[h(1),h(2),m,s]=get_h1_h4(n,fai,lamda);
end
function [h1,h4,m,s]=get_h1_h4(n,fai,lamda) load x2; load y2; load z2; gvs; map_gvs; kk=1; % 一维 k=1; % 二维 x=zeros(2*n+1,2*n+1); y=zeros(2*n+1,2*n+1); xxxx=zeros(n*n,1); yyyy=zeros(n*n,1); zzzz=zeros(n*n,1); point=[fai*gv.weight lamda*gv.weight]; num=find_num2(point); for i=-n:n for j=-n:n if num(1)+i<1 || num(2)+j<1 || num(1)+i>length(x2) || num(2)+j>length(x2) else xxxx(kk)=x2(1,num(1)+i)/gv.weight; yyyy(kk)=y2(num(2)+j,1)/gv.weight; zzzz(kk)=z2(num(2)+j,num(1)+i); kk=kk+1; end end end xxx=xxxx(1:kk-1); %拟合区域所有点的位置和重力值 yyy=yyyy(1:kk-1); zzz=zzzz(1:kk-1); f=fit([xxx,yyy],zzz,'poly22'); %曲面线性拟合 x=x2(num(1)-n:num(1)+n,num(1)-n:num(1)+n)/gv.weight; y=y2(num(2)-n:num(2)+n,num(2)-n:num(2)+n)/gv.weight; z=z2(num(2)-n:num(2)+n,num(1)-n:num(1)+n); [h1,h4]=differentiate(f,fai,lamda); %求梯度 D=z-(h1*x+h4*y); D=D(:); m=mean(D); %拟合区域的误差 s=std(D); end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号