二分图最大匹配——找老婆问题(确信)
定义
首先知道二分图是什么
简单的来说,就是把一个图分成两个点集,保证两个集合内部没有连边

那二分图最大匹配呢?也就是在这个图里有几条边,并且不存在多条边依附于同一个顶点(也就是一人一个老婆)
那最大的也就很显然了,就是令单身狗尽量的少

我们一般用匈牙利算法解决这一问题,说到这个就不得不提一下增广路了
增广路
定义
若P是图G中一条连通两个未匹配顶点的路径,并且属于M的边和不属于M的边(即已匹配和待匹配的边)在P上交替出现,则称P为相对于M的一条增广路径(举例来说,有A、B集合,增广路由A中一个点通向B中一个点,再由B中这个点通向A中一个点……交替进行)。
比如说我们先上一个图
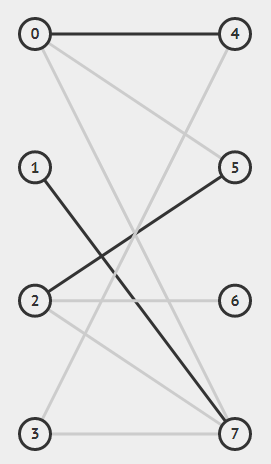
首先这里有一个M的边集{0,4 1,7 2,5}
但是我们可以找到一条增广路
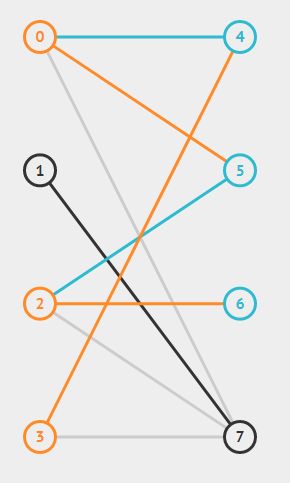
橙色即增广路,我们匈牙利算法是每次加入一个点,然后保证当前是最大二分图匹配,所以当有新的一个点(这里如3)加进来的时候,就去看它能匹配的点,(当然如果能匹配就直接匹配了)
当不能匹配的时候我们就问(能不能把你的老婆让给我?) 然后又去递归找那一个点去循环,问别人能不能让老婆,(不能让的话就等于不可以再增加最大匹配)所以我们每次都是一条尝试匹配的边(橙色的)和已经匹配的边(蓝色的)交替进行,这一条路就成为增广路——因为可以增加最大匹配的边数
性质
由增广路的定义可以推出下述五个结论:
1-P的路径长度必定为奇数,第一条边和最后一条边都不属于M。
2-不断寻找增广路可以得到一个更大的匹配M',直到找不到更多的增广路。
3-M为G的最大匹配当且仅当不存在M的增广路径。
4-最大匹配数M+最大独立数N=总的结点数
5 -- 二分图的最小路径覆盖数 = 原图点数 - 最大匹配数
增广路主要应用于匈牙利算法中,用于求二分图最大匹配
匈牙利算法
方法
①置M为空;
②找到一条增广路径P,通过操作获得更大的匹配M'代替M;
③重复②直到找不到新的增广路径。
所以我们来看看代码(代码我是从左边连边到右边,也就是左边找老婆)
1 #include<bits/stdc++.h> 2 using namespace std; 3 const int N=90010; 4 int n,m,cnt,tot,ans,tag; 5 int last[N];//链式前向星 6 bool use[N];//判断这个点是否在本次操作中有连边 7 int f[N];//右边的点和哪一个连着的(是谁的老婆 8 struct edge{ 9 int pre,to; 10 }e[N]; 11 void add(int x,int y) 12 { 13 cnt++; 14 e[cnt].pre=last[x]; 15 e[cnt].to=y; 16 last[x]=cnt; 17 } 18 bool find(int u) 19 { 20 for(int i=last[u];i;i=e[i].pre)//一条一条的找 21 { 22 int to=e[i].to; 23 if(use[to]==tag)continue;//标记这个点已经是让过得了,因为再让的话没有意义的 24 use[to]=tag;//标记 25 if(!f[to]||find(f[to]))//如果直接可以连上或者可以通过增广路得到 26 { 27 f[to]=u;//就让一让 28 return true; 29 } 30 } 31 return false; 32 } 33 int main() 34 { 35 scanf("%d%d",&n,&m); 36 for(int i=1;i<=m;i++)//连边,因为我们只需要从左边的集合走到右边的集合找老婆(你要反着来我也没意见) 37 { 38 int a,b; 39 scanf("%d%d",&a,&b); 40 add(a,b); 41 } 42 for(tag=1;tag<=n;tag++)//一个一个点加进去 43 { 44 tag++;//标记 45 if(find(tag))ans++;//能找到就多一条匹配边 46 } 47 printf("%d",ans); 48 return 0; 49 }
然后我们就有了更多的 拓 展 芝 士
最小点覆盖
即在一个图里找最少的点,并选中所连的边,使得所有的边被覆盖,这里的是二分图里的最小点覆盖
最小点覆盖=二分图最大匹配
为什么呢?
首先,光覆盖这n条匹配边,就需要n个点
然后一条最大匹配边的两端的点只能有一个点连接一个未被匹配的
如果没有,就是以下情况
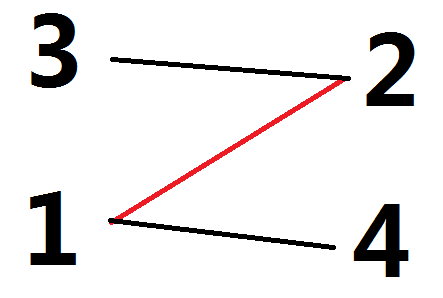
那么这就不是最大匹配了,所以不成立
所以最小点覆盖=二分图最大匹配
二分图的最大独立集
最大独立集=点数-最小点覆盖
因为选取了最小点覆盖就可以删除所有的边,所以剩下的点就是相互独立的了
最大团
就是一张图里最大的两两都有连边的
这个只在保证了取反以后可以是二分图的,因为原来是互相都相连的,所以取反后就相互独立,也就是最大独立集
最小路径覆盖
分为最小不相交路径覆盖和最小可相交路径覆盖。
小不相交路径覆盖:每一条路径经过的顶点各不相同。
最小可相交路径覆盖:每一条路径经过的顶点可以相同
DAG可相交路径
首先把每一个点拆成两个点,一个是xi,一个yi,若一个边a-b,也就是xa到by,所以就是二分图了
首先每个点都已是一个单独的路径,每次有一条边,就少了一条路径,也就是减一,所以求最大匹配即可,然后相减

 浙公网安备 33010602011771号
浙公网安备 33010602011771号