RotatedRect该类表示平面上的旋转矩形,有三个属性:
- 矩形中心点(质心)
- 边长(长和宽)
- 旋转角度
1 class CV_EXPORTS RotatedRect 2 { 3 public: 4 //构造函数 5 RotatedRect(); 6 RotatedRect(const Point2f& center, const Size2f& size, float angle); 7 RotatedRect(const CvBox2D& box); 8 void points(Point2f pts[]) const;//!返回矩形的4个顶点 9 Rect boundingRect() const; //返回包含旋转矩形的最小矩形 10 operator CvBox2D() const; //!转换到旧式的cvbox2d结构 11 Point2f center; //矩形的质心 12 Size2f size; //矩形的边长 13 float angle; //旋转角度,当角度为0、90、180、270等时,矩形就成了一个直立的矩形 14 };
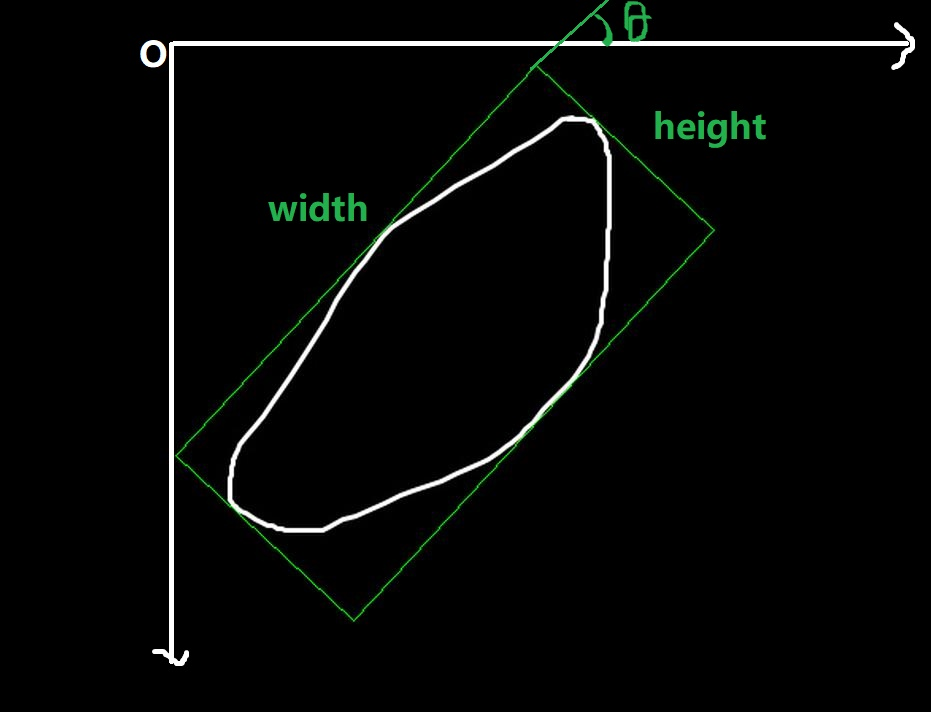
这个类中包含了外接矩形的中心center、大小size以及角度angle。为了更好的理解这几个参数的意义,请看下图:在opencv中,坐标的原点在左上角,与x轴平行的方向为角度为0,逆时针旋转角度为负,顺时针旋转角度为正。角度是水平轴(x轴)顺时针旋转,与碰到的第一个边的夹角度数。而opencv默认把这个边的边长作为height。
1 #include<opencv2/opencv.hpp> 2 #include<iostream> 3 using namespace std; 4 using namespace cv; 5 6 int main() 7 { 8 Mat img = imread("C:\\Users\\hsy\\Desktop\\1.jpg"); 9 Mat img_gray; 10 cvtColor(img, img_gray, COLOR_RGB2GRAY); 11 img_gray = img_gray > 30; 12 vector<vector<Point>>contours; 13 vector<Vec4i> hierarchy; 14 vector<RotatedRect>rect; 15 //【5】查找轮廓 16 findContours(img_gray, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE); 17 for (int i = 0; i < contours.size(); i++) 18 { 19 rect.push_back(minAreaRect(contours[i])); 20 Point2f vertices[4]; //定义矩形的4个顶点 21 rect[i].points(vertices); //计算矩形的4个顶点 22 for (int i = 0; i < 4; i++) 23 line(img, vertices[i], vertices[(i + 1) % 4], Scalar(0, 255, 0),1); 24 cout <<"width的值:"<<rect[i].size.width << endl; 25 cout << "height的值:" << rect[i].size.height << endl;//其实只有一个外接矩形 26 } 27 imshow("img", img); 28 waitKey(0);
}