矩阵复数和向量
前言
FFT 的前置知识。
1. 矩阵
本质上是一个数表,类似于二维数组。
1.1 \(\LaTeX\)
圆括号矩阵
$$
\begin{pmatrix}
a & \dots & b\\
\vdots & \ddots & \vdots\\
c & \dots & d\\
\end{pmatrix}
$$
方括号矩阵
$$
\begin{bmatrix}
a & \dots & b\\
\vdots & \ddots & \vdots\\
c & \dots & d\\
\end{bmatrix}
$$
大括号矩阵
$$
\begin{Bmatrix}
a & \dots & b\\
\vdots & \ddots & \vdots\\
c & \dots & d\\
\end{Bmatrix}
$$
竖线矩阵(行列式)
$$
\begin{vmatrix}
a & \dots & b\\
\vdots & \ddots & \vdots\\
c & \dots & d\\
\end{vmatrix}
$$
1.2 矩阵的表示与比较
一般用一个大写字母加上角标来表示一个矩阵,如:
表示一个 \(m\) 行 \(n\) 列的矩阵 \(A\)。
同型矩阵
如果两个矩阵的行数,列数均相等,我们称这两个矩阵为同型矩阵。
相等矩阵
两个矩阵是同型矩阵,且对应位置的元素均相等。
1.3 矩阵的运算
加法
前提:两个矩阵是同型矩阵。
将两个矩阵的对应位置相加,得到的新矩阵就是这两个矩阵的和。
例:计算:
结果为:
矩阵的加法满足交换律、结合律,即:
减法
前提:两个矩阵是同型矩阵。
将两个矩阵的对应位置相减,得到的新矩阵就是这两个矩阵的差。
例:计算:
结果为:
乘法
当一个数与矩阵相乘时,就是把矩阵每一个位置的值都乘以这个数。
这种运算具有交换律,结合律,分配律:
当矩阵与矩阵相乘时,有前提条件:
对于矩阵 \(A_{a\times b}\) 和矩阵 \(B_{m\times n}\),当 \(b=m\) 时,两者才能相乘。
两个矩阵相乘,用左侧矩阵中一行的某些数分别对应乘以右边矩阵一列中的数,将乘积相加作为新的矩阵中一个位置的值。
形式化的,对于两个矩阵 \(A_{i\times j}\) 和 \(B_{j\times k}\) 相乘,设新的矩阵为 \(C\):
似乎很复杂,但定义是这样定的。
如果两个矩阵 \(A_{i\times j}\) 和 \(B_{j\times k}\) 相乘,则新的矩阵 \(C\) 是一个 \(i\) 行 \(k\) 列的矩阵。
特殊的,矩阵乘法 不 具有交换律,即对于矩阵乘法 \(AB\) 和 \(BA\),可能有这样的三种情况:
- 交换前后不满足前提条件,无法进行乘法。
- 交换前后的乘积不是同型矩阵。
- 交换前后的乘积不一定相等。
矩阵乘法也具有如下的特殊性质:
- 如果 \(AB=0\)(即结果全是 \(0\) 的矩阵),无法得出 \(A=0\) 或 \(B=0\)。
- 如果 \(AB=AC,A\ne 0\),无法得出 \(B=C\)。
矩阵乘法相对于普通乘法还有这样的性质:
- 结合律,即 \((AB)C=A(BC)\)
- 左右分配律,即 \(C(A+B)=CA+CB\),\((A+B)C=AC+BC\)
不能将 \(C\) 与另一个矩阵的顺序调换,因为矩阵不具有交换律。
矩阵的转置
所谓转置,就是将矩阵的行和列互换。
用 \(A^T\) 来表示矩阵 \(A\) 的转置。
转置后,原来在 \(i,j\) 位置上的元素会到 \(j,i\) 去。
例如对于矩阵:
其转置为:
1.4 特殊的矩阵
- 方阵:行数等于列数的方阵。
- 零矩阵:矩阵内的所有值都是 \(0\),一般记作 \(O\)(大写的字母)。
- 单位矩阵:这个矩阵乘以任何一个矩阵都等于其本身。
单位矩阵是方阵,它的主对角线(左上到右下的对角线)上的值都是 \(1\),其它值为 \(0\)。
一般将单位矩阵记作 \(E\)。一个 \(3\times 3\) 单位矩阵示例:\[E=\begin{pmatrix} 1&0&0\\ 0&1&0\\ 0&0&1 \end{pmatrix}\] - 对角矩阵:主对角线之外的元素全为 \(0\) 的方阵。
- 三角矩阵:主对角线一侧的元素全为 \(0\)(不含主对角线)的方阵。
- 对称矩阵:转置等于自己的矩阵(显然一定是方阵)。这样的矩阵中的元素以主对角线为对称轴对称。
- 行向量:只有一行元素的矩阵。
- 列向量:只有一列元素的矩阵。
1.5 计算机内表示矩阵
一般使用结构体或类来封装矩阵,在封装内重载运算符来让矩阵可以像普通的数一样加减乘除。
以下是在 C++ 中使用结构体封装的矩阵:
#define rd read()
#include<bits/stdc++.h>
using namespace std;
typedef long long ll;
ll read(){
ll x=0,f=1;
char c=getchar();
while(c>'9'||c<'0'){if(c=='-') f=-1;c=getchar();}
while(c>='0'&&c<='9'){x=(x<<3)+(x<<1)+(c^48);c=getchar();}
return x*f;
}
struct matrix{
ll data[105][105];
//矩阵的值
ll n,m;
//矩阵的行列数,n 行 m 列。
matrix(){
memset(data,0,sizeof data);
//默认初始化为 0 矩阵
}
matrix(ll line,ll row,ll k){
n=line;m=row;
//调用构造函数自动构造为对角矩阵
if(m!=n){//如果不是方阵则无法构造,输出错误信息
cout<<"invaild initializing"<<'\n';
return;
}
for(int i=1;i<=n;i++){
data[i][i]=k;
}
}
matrix operator+(const matrix &x)const{//重载 + 操作
if(x.m!=m||x.n!=n){
cout<<"invaild addition operator"<<'\n';
matrix res(1,1,1);
return res;
}
matrix c;
c.m=m;
c.n=n;
for(int i=1;i<=n;i++){
for(int j=1;j<=m;j++){
c.data[i][j]=x.data[i][j]+data[i][j];
}
}
return c;
}
matrix operator-(const matrix &x)const{//重载 - 操作
if(x.m!=m||x.n!=n){
cout<<"invaild subtraction operator"<<'\n';
matrix res(1,1,1);
return res;
}
matrix c;
c.m=m;
c.n=n;
for(int i=1;i<=n;i++){
for(int j=1;j<=m;j++){
c.data[i][j]=data[i][j]-x.data[i][j];
}
}
return c;
}
matrix operator*(const matrix &x)const{//重载 * 操作
if(m!=x.n){
cout<<"invaild multi operator"<<'\n';
matrix res(1,1,1);
return res;
}
matrix c;
c.n=n;
c.m=x.m;
for(int i=1;i<=n;i++){
for(int j=1;j<=m;j++){
for(int k=1;k<=x.m;k++){
c.data[i][k]+=data[i][j]*x.data[j][k];
}
}
}
return c;
}
matrix trans(){//转置函数
matrix c;
c.n=m;
c.m=n;
for(int i=1;i<=n;i++){
for(int j=1;j<=m;j++){
c.data[j][i]=data[i][j];
}
}
return c;
}
};
int main(){
//testing
matrix a,b;
a.n=3;a.m=2;
b.n=3;b.m=3;
a.data[1][1]=1;a.data[1][2]=1;
a.data[2][1]=5;a.data[2][2]=1;
a.data[3][1]=1;a.data[3][2]=9;
b.data[1][1]=9;b.data[1][2]=9;b.data[1][3]=9;
b.data[2][1]=9;b.data[2][2]=9;b.data[2][3]=9;
b.data[3][1]=9;b.data[3][2]=9;b.data[3][3]=9;
matrix ans;
ans=a.trans();
for(int i=1;i<=2;i++){
for(int j=1;j<=3;j++){
cout<<ans.data[i][j]<<' ';
}
cout<<'\n';
}
//testing
return 0;
}
1.6 矩阵快速幂
2. 复数
2.1 一些定义
任何复数(complex number)都可以表示为 \(a+bi\) 的形式,其中 \(a,b \in \mathbb{R},b\ne 0\)。\(i\ (imaginary)\) 是人为定义的,\(i=\sqrt{-1}\)。
由定义可知 \(i^2=-1\)
一般用字母 \(z\) 来表示复数。
复数集 \(\mathbb{C}\) 是人类已经发现的最大的数集,其内分为实数集和虚数集。
虚数集又可细分为 纯虚数集,有如下关系:
- 所有数都可以表示为 \(a+bi\) 的形式。
- 当 \(b=0\) 时,这个数是实数。
- 当 \(a \ne 0,b \ne 0\) 时,这个数是虚数。
- 当 \(a=0,b\ne 0\) 时,这个数是纯虚数,纯虚数也是虚数。
对于一个复数 \(z=a+bi\),\(a\) 叫做这个复数的 实部,\(b\) 叫做这个复数的 虚部。
对于两个复数,如果这两个复数的实部相等,虚部互为相反数,我们称这两个复数互为共轭复数。
2.2 复平面
类比于使用数轴来表示实数,由于一个复数的表示需要两个变量 \(a,b\),我们将这两个变量组成点 \((a,b)\) 映射到一个坐标系中,这种表示复数的坐标系叫做 复平面。
在复平面中,人为规定 \(x\) 轴表示实部,\(y\) 轴表示虚部,如下图:
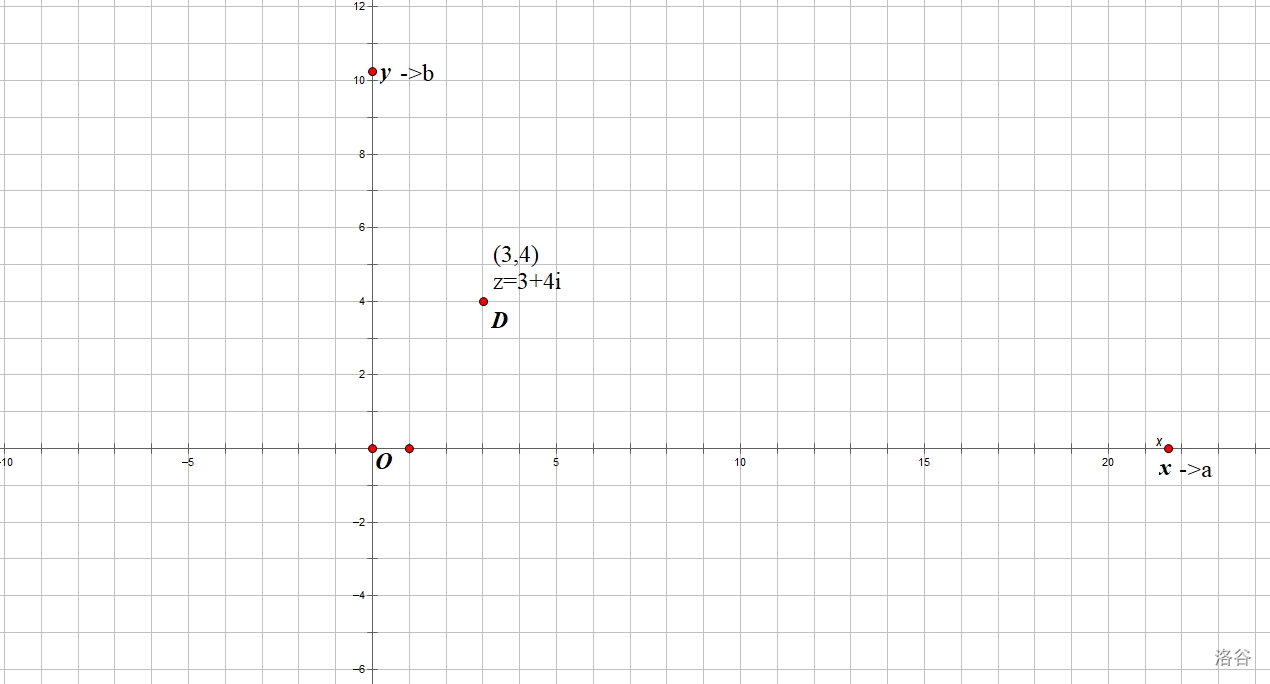
正如所有实数都可以在数轴上找到,所有虚数都可以在复平面上找到。
观察复平面可以发现:在 \(x\) 轴上的点表示实数,在 \(y\) 轴上的点表示纯虚数。
同样类比于在数轴上的点到原点的距离,我们把复数在复平面上对应的点到原点的距离叫做这个复数的 模(模长),使用 \(|z|\) 表示。
复数的模可以简单地用勾股定理求出,即 \(|z|=\sqrt{a^2+b^2}\)
由于复平面上的点与复数是一一对应的,因此:
- 当两个点相同时,其所表示的复数相等。
- 当两个复数相等时,其在复平面内所对应的点也相同。
注意:复数之间一般不能比较大小。
2.3 四则运算
加法
两复数相加,分别把实部相加,虚部相加。
例:
复数与实数相加,只把实数与复数的实部相加。
复数的加法满足交换律和结合律。
减法
两复数相减,分别把实部相减,虚部相减。
例:
复数与实数相减,只需按照顺序把实数与复数的实部相减。
乘法
两复数相乘,类似于多项式乘法。
例:
实数与复数相乘,把实数分别与复数的实部与虚部相乘。
复数的乘法满足交换律,结合律,分配律。
有类似于实数的完全平方公式:
平方差公式:
在平方差公式中,我们发现参与计算的两个复数变成了实数,类比于根式的分母有理化,我们将这样的操作称为实数化。
实数化技巧常用于分母是复数的分数的化简中,下文除法运算中就有一例。
除法
一个复数除以另一个复数,相当于乘这个复数的倒数。
例:
实数除以复数和复数除以实数也是同理列出分数计算即可。
3. 平面向量
既有大小又有方向的量叫做 向量。
向量可以使用一个带箭头的线段在几何上表示,如:
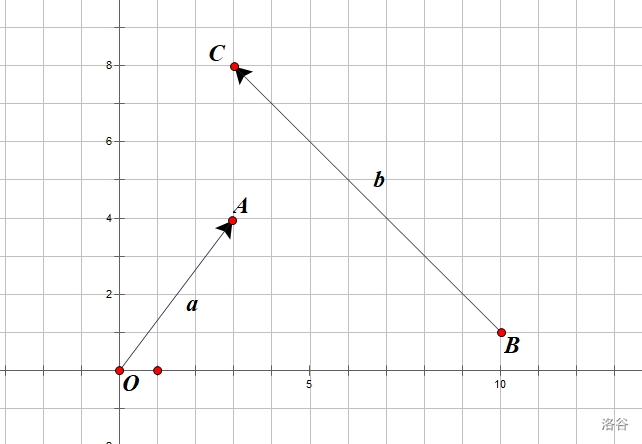
在图中,从 \(O\) 到 \(A\) 的带箭头的线段表示一个向量。
代数层面,我们用一个向量的起始点与结束点所代表的字母按顺序组合在一起,在上面加个从起始点到结束点的箭头来表示一个向量。
例如在上图中的两个向量可以表示为:
$$\overrightarrow{OA},\overrightarrow{BC}$$
注意:箭头指向左边的记法一般不常用。
像线段一样,我们也可以用一个小写字母表示一个向量。
例如在上图中的两个向量还可以表示为:
$$\vec{a},\vec{b}$$
某一写书籍上常常用加粗的小写字母表示一个向量,常常不写箭头,但是手写体必须加箭头。
两个向量相等,代表两个向量的大小,方向相同。
反过来,只有两个向量的大小,方向同时相同时,两个向量才相等。
这里我们可以发现,两个向量是否相等,和他们的起始点没有关系,因此 向量可以任意平移。
3.1 细说向量的大小和方向
向量的大小叫做向量的 模长,书写时在向量的两边加上类似于绝对值的符号,例如:
$$ | \overrightarrow{OA} | $$
表示向量 \(\overrightarrow{OA}\) 的模长。
向量的模长在坐标系中可以简单的用勾股定理求出。
有几个特殊的模长:
- 当一个向量的模长等于 \(1\) 时,我们把这样的向量称作 单位向量。
使用 \(\overrightarrow{e}\) 来表示单位向量。
注意:单位向量不只有一个。 - 当一个向量的模长等于 \(0\) 时,我们叫做 零向量 。
使用 \(\overrightarrow{0}\) 来表示零向量。
注意:零向量的方向是任意的。
正如平面几何中线的关系一样,平面向量也有一些位置关系:
-
两个向量垂直,记作 \(\overrightarrow{a}\perp \overrightarrow{b}\)。
-
两个向量平行,记作 \(\overrightarrow{a}\parallel \overrightarrow{b}\)。
由于向量可以随意平移,因此对于两个互相平行的向量,也可以说他们是共线的。
同理对于两个共线的向量,也可以说他们是平行的。
因此,两个向量平行和两个向量共线这两种称呼是等价的。由于零向量可以表示任意方向,因此我们说零向量与任意向量都是平行的。
因此,向量之间的平行没有传递性,反例如下:
\(\overrightarrow{a}\parallel \overrightarrow{b}\) 且 \(\overrightarrow{b}\parallel \overrightarrow{c}\) ,但如果 \(\overrightarrow{b}\) 是零向量,那么 \(\overrightarrow{a}\) 和 \(\overrightarrow{c}\) 的方向就有可能不相等了,因此 \(\overrightarrow{a}\) 和 \(\overrightarrow{c}\) 不一定平行。
3.2 向量的运算
为了方便演示,运算配图在直角坐标系内进行,使用几何画板制图。
加法
因为向量可以随意平移,我们一般将两个向量平移到首位相接或起点相同来进行计算。
类似于力的合成,当两个向量共起点时,两者加法的答案为两向量做出的平行四边形,从起点开始的对角线上的另一点。
直观的用图描述:
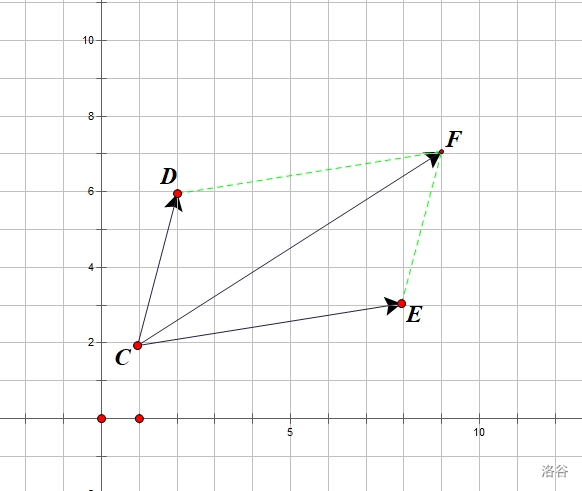
在上图中,\(\overrightarrow{CD}+\overrightarrow{CE}=\overrightarrow{CF}\),可以看出,\(D,C,E,F\) 共同构成了一个平行四边形。
这样求解两向量和的方法我们称之为平行四边形法则。
但是当我们要求解多个向量的和时,每两个向量单独计算后在合并似乎有些麻烦,我们有第二种方法。
还是将向量平移,但
迁移自洛谷

 浙公网安备 33010602011771号
浙公网安备 33010602011771号