
汽车质心绝对加速度数学推导和滑模控制实例
1. 线性二自由度汽车质心绝对加速度在车辆坐标系下的公式
在汽车线性二自由度微分方程那篇博客中,我具体推导了\(a_y\),但是用了近似和忽略。下面将用向量的方法,详细推导出\(a_x、a_y\)。
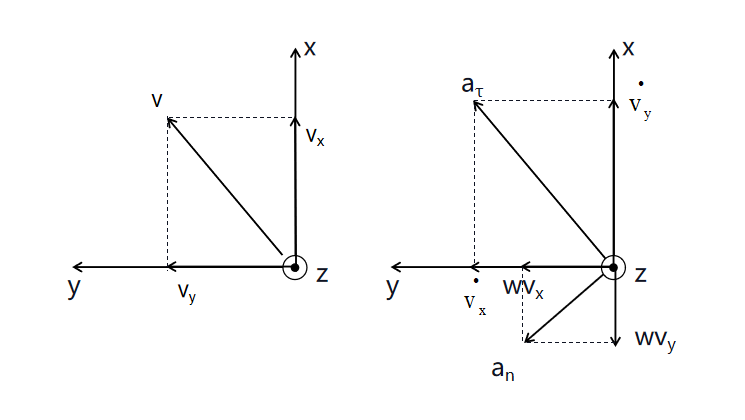
下面是推导的过程:
其中\(\tau\)向就是切向,而\(n\)向就是法向。
2. 一个汽车跟踪问题的滑模控制实例
例:汽车队列跟踪问题可以抽象出如下的模型:\(\overset{··}{x}=-\overset{·}{x}\ ^2+u\), 设计控制律\(u\),使\(x\rarr x_d\quad (t\rarr \infty)\)
解:设\(\epsilon=x-x_d\),则\(\overset{·}{\epsilon}=\overset{·}{x}-\overset{·}{x_d}\),\(\overset{··}{\epsilon}=\overset{··}{x}-\overset{··}{x_d}\)
可以设计切换函数\(S(\epsilon)=k\epsilon+\overset{·}{\epsilon}\quad (k>0)\)
接下来可以证明切换函数的滑模稳定性、存在性、可达性。
2.1 滑模稳定性
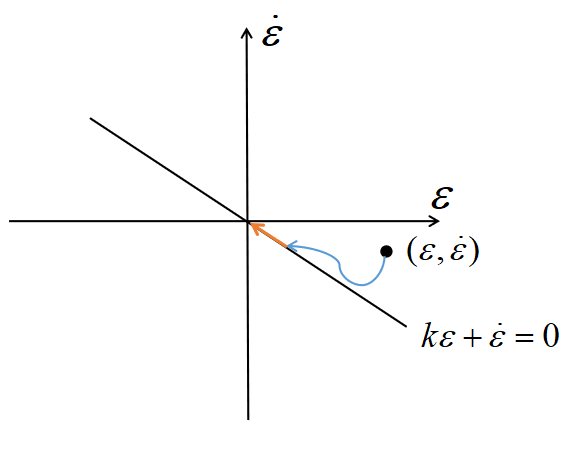
滑模稳定性是指\(S\rarr0\)时,\(\epsilon\rarr0\)且\(\overset{·}{\epsilon}\rarr0\),即点\((\epsilon,\overset{·}{\epsilon})\)会沿着滑模面\(k\epsilon+\overset{·}{\epsilon}=0\)到达原点。如下图中的黄线所示。
可以很快证明滑模稳定性,根据\(k\epsilon+\overset{·}{\epsilon}=0\),可以解得\(\epsilon=ce^{-kt}\),\(\overset{·}{\epsilon}=-cke^{-kt}\)
当\(t\rarr \infty\)时,可知\(\epsilon\rarr0\),\(\overset{·}{\epsilon}\rarr0\),滑模存在稳定性。
2.2 滑模存在性与可达性
滑模控制系统存在性的充分条件是 \(\underset{S\rarr0}{lim}S\overset{·}{S}<0\),该条件可以保证系统在滑模面附近的任意初始状态,都能到达滑模面,是局部到达的条件。
滑模控制系统可达性的充分条件是 \(S\overset{·}{S}<0\),该条件可以保证系统在状态空间的任意位置,都能到达滑模面,是全局可达条件。
上面两个要素都是指如何到达滑模面的事情,如上图的蓝线所示。
接下来证明滑模可达性(也就证明了存在性)。
可以采用等速趋近律\(\overset{·}{S}=-\lambda sgn(s)\quad(\lambda>0)\),在该趋近律下,\(S\overset{·}{S}<0\)成立。因为\(S>0\)时,\(\overset{·}{S}<0\);\(S<0\)时,\(\overset{·}{S}>0\)。
将切换函数\(S(\epsilon)=k\epsilon+\overset{·}{\epsilon}\)左右两边求导,得到
再将\(\overset{··}{\epsilon}=\overset{··}{x}-\overset{··}{x_d}\)带入上式,得到
得到的\(\overset{··}{x}\)与控制律\(u\)存在关系\(\overset{··}{x}=-\overset{·}{x}\ ^2+u\),所以将它代入上式就引入了控制律。
将上式与等速趋近律联立消去\(\overset{·}{S}\),得到
\(u\)可以看成\(u_{equ}\)和\(u_N\)两部分:
-
等效控制部分 \(u_{equ}=-k\overset{·}{\epsilon}+\overset{··}{x_d}+\overset{·}{x}\ ^2\)
-
反馈控制部分 \(u_N=-\lambda sgn(s)\)
本文来自博客园,作者:静候佳茵,转载请注明原文链接:https://www.cnblogs.com/hitwherznchjy/p/16200718.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号