【论文阅读】DGCNN:Dynamic Graph CNN for Learning on Point Clouds
毕设进了图网络的坑,感觉有点难,一点点慢慢学吧,本文方法是《Rethinking Table Recognition using Graph Neural Networks》中关系建模环节中的主要方法。
## 概述
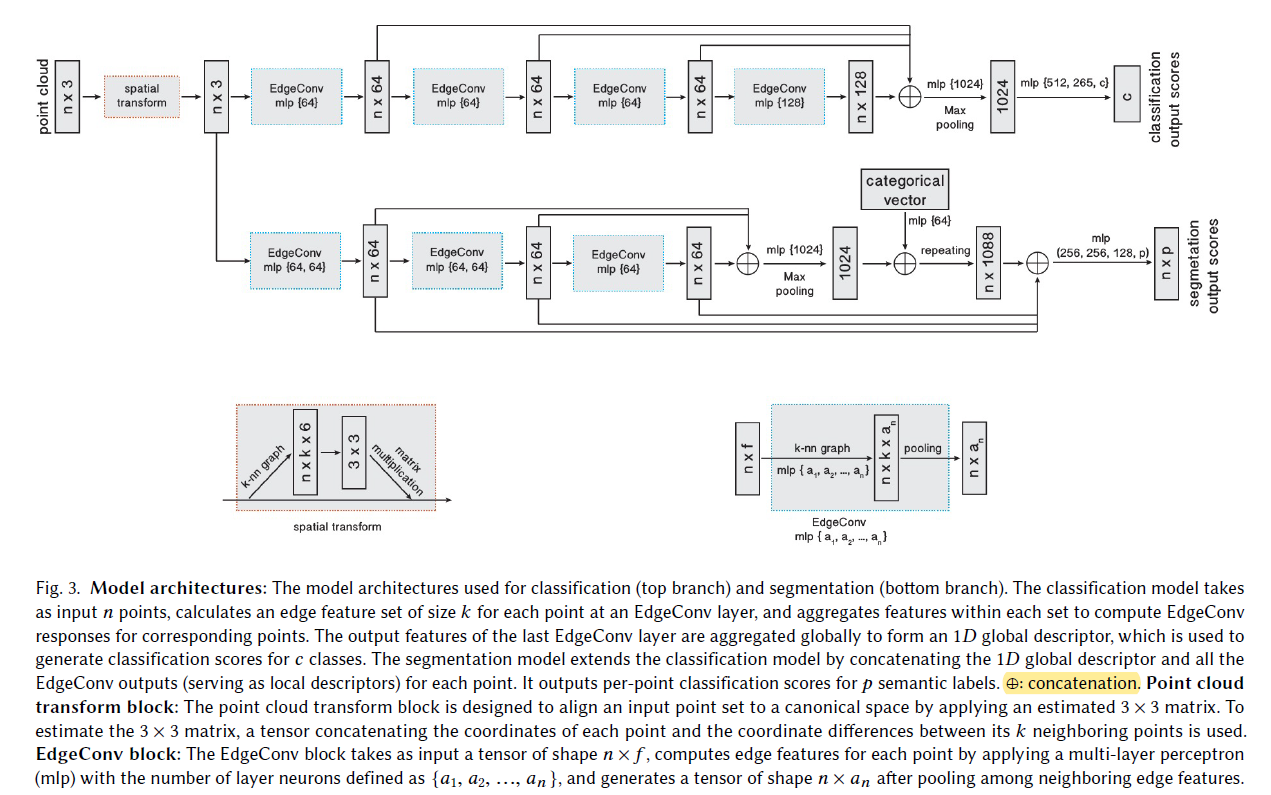
本文是对经典的PointNet进行改进,主要目标是设计一个可以直接使用点云作为输入的CNN架构,可适用于分类、分割等任务。主要的创新点是提出了一个新的可微网络模块EdgeConv(边卷积操作)来提取局部邻域信息。
其整体的网络结构如下所示,值得注意的有:
- 整体的网络结构与PointNet的结构类似,最重要的区别就是使用EdgeConv代替MLP;
- 对于每个EdgeConv模块,我们即考虑全局特征,又考虑局部特征,
 (图2左)聚合函数
(图2左)聚合函数  (图2右);
(图2右); - EdgeConv模块中KNN图的K值是一个超参,分类网络中K=20,而在分割网络中K=30;在做表格识别任务时,k=10;
- 在分割网络中,将global descripter和每层的local descripter进行连接后对每个点输出一个预测分数;
- 每层后的mlp全连接 都是为了计算边特征(edge features),实现动态的图卷积。
## Edge Convolution

- 假设一个F维点$\mathbf{X}=\left\{\mathbf{x}_{1}, \ldots, \mathbf{x}_{n}\right\} \subseteq \mathbb{R}^{F}$, 最简单的$\mathrm{F}=3$(即x y z位置信息),另外还可能引入每个点颜色、法线等信息。
- 给定一个有向图 $\mathcal{G}=(\mathcal{V}, \mathcal{E})$ ,用来表示点云结构信息,其中顶点为$\mathcal{V}=\{1, \ldots, n\}$,边为 $\mathcal{E} \subseteq \mathcal{V} \times \mathcal{V}$,边特征函数$e_{i j}=h_{\Theta}\left(x_{i}, x_{j}\right)$,其中 $h$是 $\mathbb{R}^{F} \times \mathbb{R}^{F} \rightarrow \mathbb{R}^{F^{\prime}}$的映射(从结点信息获取边特征信息)
- 图2左 就描述了一个点$x_{i}$和其邻近点$x_{j}$ 的边特征$e_{i j}$求解过程,$h$使用三层全连接,用tf.layers.dense实现。(注:Dense and fully connected are two names for the same thing.)
- 图2右 描述的是结点参数更新的过程(结点聚合函数),定义为$\square$,其定义是:$\mathbf{x}_{i}^{\prime}=\square_{j:(i, j) \in \mathcal{E}} h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)$,根据不同的需求,h和□有四种不同的选择
- 认为$x_{i}$的特征是周围所有点的加权求和,这一点类似于图像的卷积操作,其中每个卷积核为${\theta}_{m}$,他的维度与x的维度相同,$\Theta=\left(\theta_{1}, \ldots, \theta_{M}\right)$表示所有卷积核的集合。其公式如下:$x_{i m}^{\prime}=\sum_{i=(j, j) \in \mathcal{E}} \boldsymbol{\theta}_{m} \cdot \mathbf{x}_{j}$
- 若只考虑全局特征,即PointNet的使用方法,公式如下:$h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=h_{\Theta}\left(\mathbf{x}_{i}\right)$
- 若只考虑局部特征,即输入的仅为点和周围点的差,则公式如下:$h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=h_{\Theta}\left(\mathbf{x}_{j}-\mathbf{x}_{i}\right)$
- 同时关注全局特征和局部特征,这也是本文中的主要形式:$h_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}\right)=\bar{h}_{\Theta}\left(\mathbf{x}_{i}, \mathbf{x}_{j}-\mathbf{x}_{i}\right)$
- 在本文中,h函数使用$e_{i j m}^{\prime}=\operatorname{ReLU}\left(\boldsymbol{\theta}_{m} \cdot\left(\mathbf{x}_{j}-\mathbf{x}_{i}\right)+\boldsymbol{\phi}_{m} \cdot \mathbf{x}_{i}\right)$,关系聚合函数选用 max
## 在表格识别任务中实现的代码
在我的毕设,即表格识别任务中,主要借用edge conv的思想,和分割部分的网络结构。
其流程目的是将结点的特征进行提取,即输入为(25,900,133)(batch_size, node_num, feature_num),输出为经DGCNN处理后的结点信息,size为(25,900,128),整体流程如下:
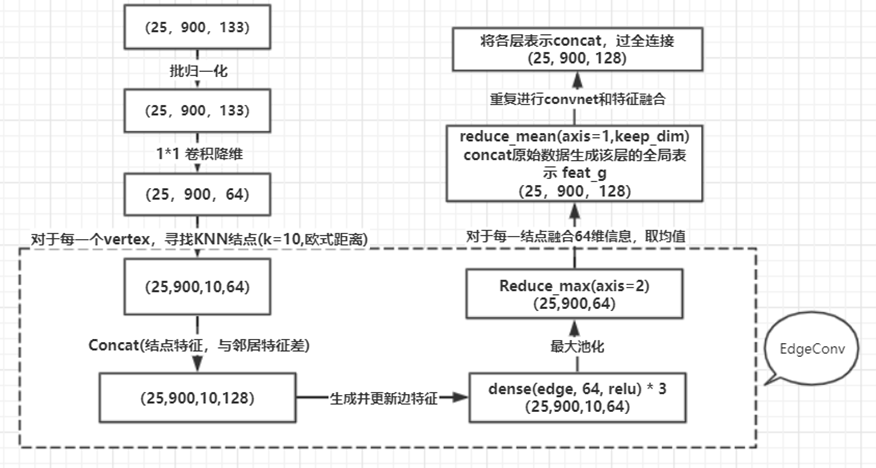
1 def edge_conv_layer(vertices_in, num_neighbors=30, 2 mpl_layers=[64, 64, 64], 3 aggregation_function=tf.reduce_max, 4 share_keyword=None, # TBI, 5 edge_activation=None 6 ): 7 trans_space = vertices_in # (25,900,64) 8 indexing, _ = indexing_tensor(trans_space, num_neighbors) # (25,900,10,2) 9 # change indexing to be not self-referential 10 neighbour_space = tf.gather_nd(vertices_in, indexing) # (25, 900, 10, 64) 11 12 expanded_trans_space = tf.expand_dims(trans_space, axis=2) 13 expanded_trans_space = tf.tile(expanded_trans_space, [1, 1, num_neighbors, 1]) # (25, 900 , 10(null), 64) 14 15 diff = expanded_trans_space - neighbour_space # (25, 900, 10, 64) 16 edge = tf.concat([expanded_trans_space, diff], axis=-1) # (25, 900, 10, 128) 17 18 for f in mpl_layers: 19 edge = tf.layers.dense(edge, f, activation=tf.nn.relu) # 三层全连接 (25,900,10,64) 20 if edge_activation is not None: 21 edge = edge_activation(edge) 22 23 vertex_out = aggregation_function(edge, axis=2) # (25,900,64) 24 # print("vertex_out:", vertex_out.shape) 25 return vertex_out
E-mail:hithongming@163.com

 浙公网安备 33010602011771号
浙公网安备 33010602011771号