d2l-GRU-LSTM
1. 门控循环单元 GRU
GRU和RNN的区别:
- GRU支持对隐状态的门控。模型有专门的机制来决定何时更新隐状态,何时重置隐状态
- GRU的数值稳定性更强,能够处理更长的文本
- GRU的功能是LSTM的变种,两者功能类似
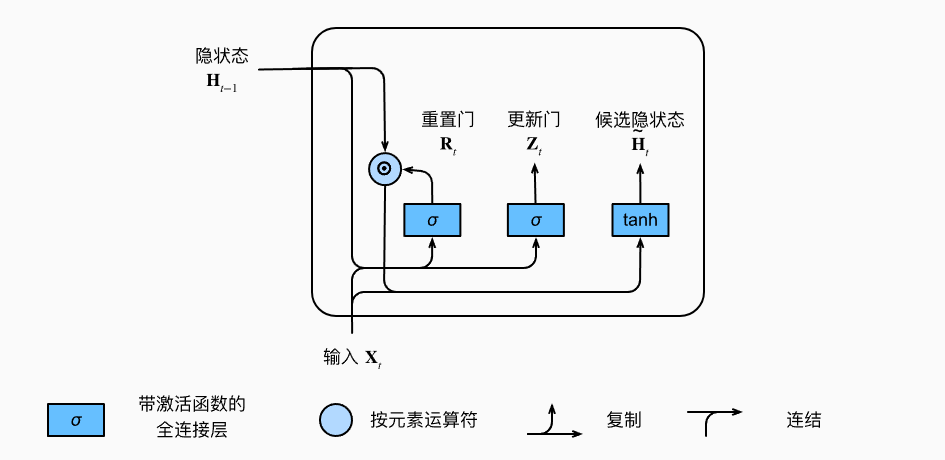
重置门 (reset gate),更新门 (update gate):这两个门和隐状态的形状相同,因此GRU的可学习参数是RNN的3倍。

\[R_t = \sigma(X_t W_{xr} + H_{t-1} W_{hr} + b_r)
\]
\[Z_t = \sigma(X_t W_{xz} + H_{t-1} W_{hz} + b_z)
\]
其中,\(\sigma\)为sigmoid激活函数
候选隐状态 (candidate hidden state):由重置门\(R_t\)与常规隐状态更新机制集成得到
\[\tilde{H}_t = tanh(X_t W_{xh} + (R_t \odot H_{t-1})W_{hh} + b_h)
\]
其中,\(\odot\)为Hadamard积(按元素乘积)。
- \(R_t\)接近1时,类似于普通的RNN
- \(R_t\)接近0时,\(\tilde{H}_t\) 是以 \(X_t\) 为输入的多层感知机的结果。先前的隐状态被重置为默认值。
隐状态\(H_t\)还取决于\(H_{t-1}\), \(\tilde{H}_t\), 更新门\(Z_t\)。
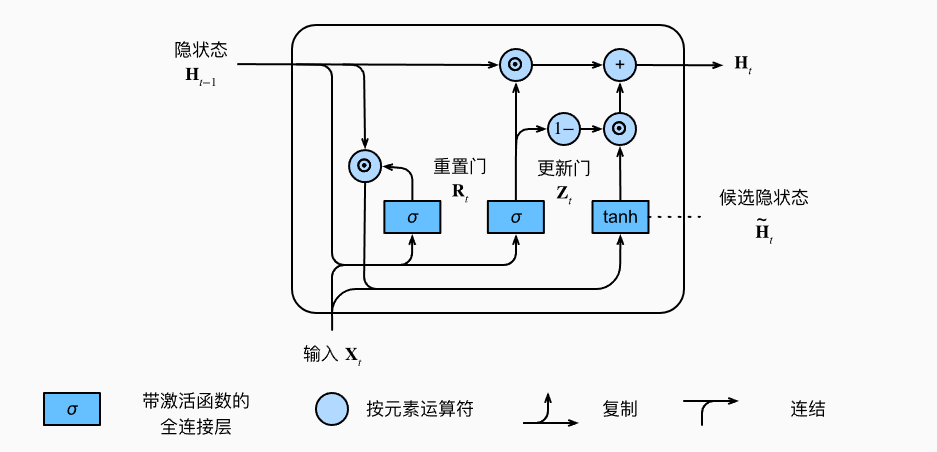
\[H_t = Z_t \odot H_{t-1} + (1 - Z_t) \odot \tilde{H}_t
\]
- \(Z_t\)接近1时,模型倾向于保留就状态,从而忽略\(X_t\)的信息
- \(Z_t\)接近0时,新的隐状态\(H_t\)接近候选状态\(\tilde{H}_t\)
# Pytorch 简洁实现
num_inputs = vocab_size
gru_layer = nn.GRU(num_inputs, num_hiddens)
model = d2l.RNNModel(gru_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
综上所述:
- 重置门有助于模型捕获序列中的短期依赖关系
- 更新门有助于模型捕获序列中的长期依赖关系
2. 长短期记忆网络 LSTM
LSTM中有3种门:遗忘门 F,输入门 I,输出门 O
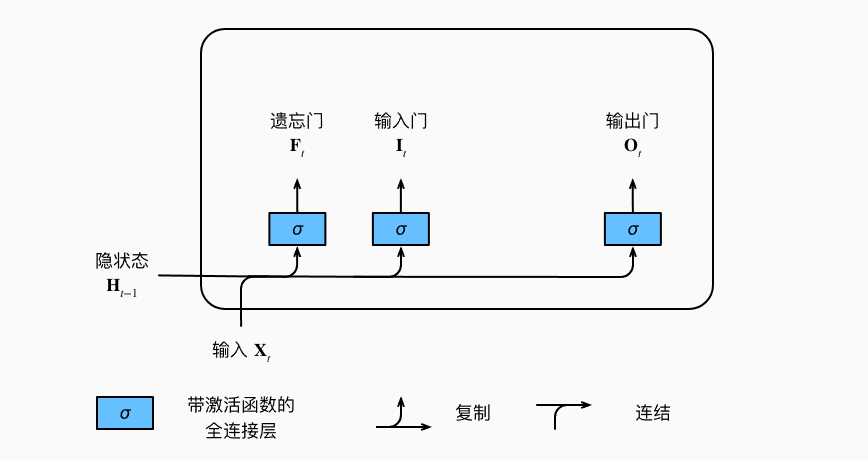
\[I_t = \sigma(X_t W_{xi} + H_{t-1} W_{hi} + b_i)
\]
\[F_t = \sigma(X_t W_{xf} + H_{t-1} W_{hf} + b_f)
\]
\[O_t = \sigma(X_t W_{xo} + H_{t-1} W_{ho} + b_o)
\]
其中,\(\sigma\)为sigmoid激活函数
候选记忆元\(\tilde{C}_t\)使用tanh作为激活函数。
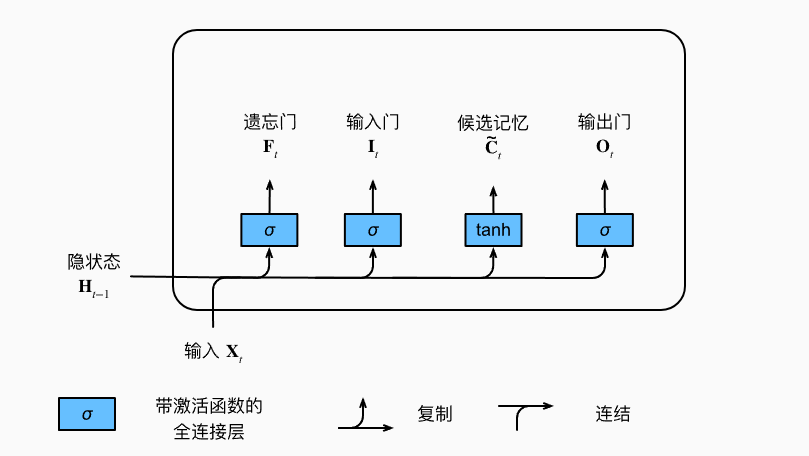
\[\tilde{C}_t = tanh(X_t W_{xc} + H_{t-1} W_{hc} + b_c)
\]
记忆元\(C_t\):
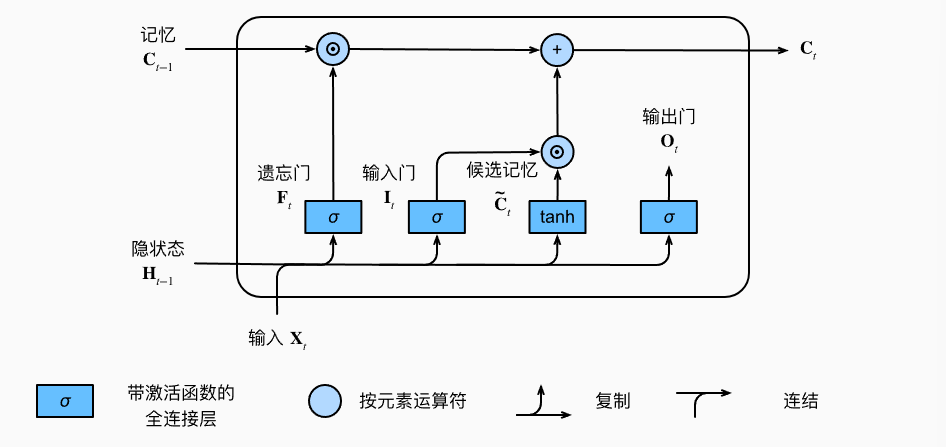
\[C_t = F_t \odot C_{t-1} + I_t \odot \tilde{C}_t
\]
- 遗忘门\(F_t\)控制保留过去多少的记忆元 \(C_{t-1}\)
- 输入门\(I_t\)控制采用多少来自\(\tilde{C}_t\)的新数据
隐状态\(H_t\):
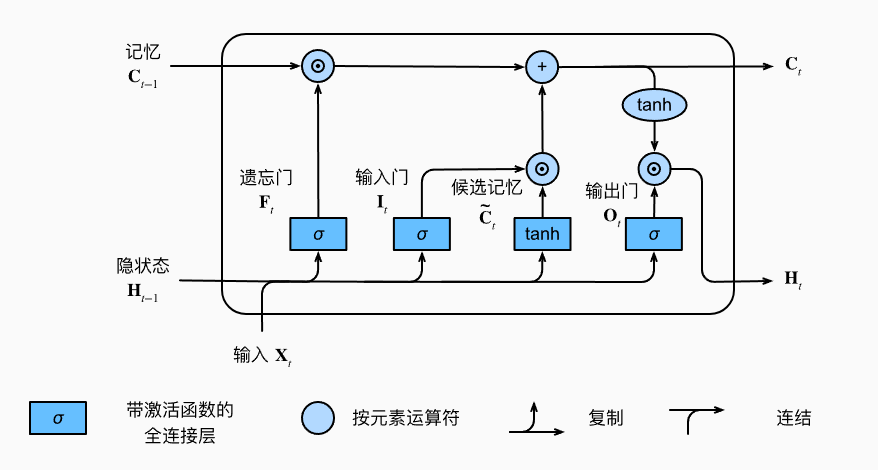
\[H_t = O_t \odot tanh(C_t)
\]
- tanh函数保证了\(H_t\)始终在(-1, 1)内,防止梯度爆炸
- 输出门\(O_t\)接近1时,能够将所有记忆传递给预测部分
- 输出门\(O_t\)接近0时,只保留记忆元内的信息,而不更新隐状态
综上所述:
- LSTM中有3种门:遗忘门、输入门、输出门
- LSTM的隐藏层输出包括:
- 隐状态H:会传递到输出层
- 记忆元C:属于内部信息

 浙公网安备 33010602011771号
浙公网安备 33010602011771号