根轨迹相角条件入射角和出射角的计算问题
在学习根轨迹的绘制时,我发现许多教材和资料对于相角条件和入射角、出射角的计算讲解较为笼统,只是给出了相关的公式,这样对于我们的理解往往会造成比较大的困难。
一些关于复数的数学基础
考虑复数z
其中\(\theta\)被称为相角,r被称为幅值,这样将实部虚部转化为相角形式。
在实轴虚轴坐标系中,\(\theta\)可以表示为点与原点连线与实轴正半轴的交点。
考虑复数\(z_1,z_2\)
所以两个复数相乘等价于两者的相角相加,同理
两个复数相减等于相角之差
同时
对应的坐标\((a_1-a_2,b_1-b_2)\),故\(\angle (z_1-z_2)\)可以理解为\(z_1,z_2\)两个复数在坐标系中对应点的连线与实轴正半轴的交点。
相角条件
考虑系统
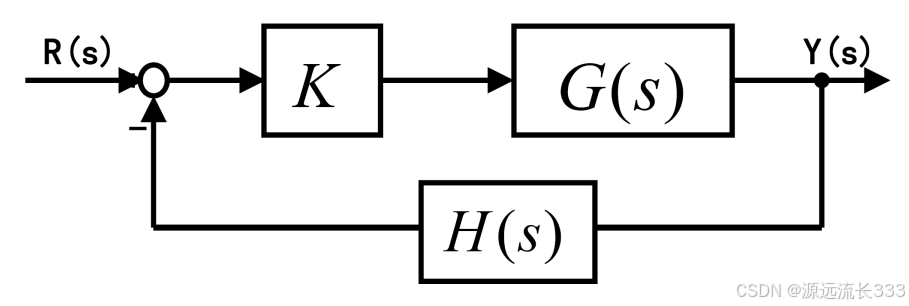
特征方程为
那么
-1在复数域对应的相角为\((2k+1)\pi\),所以我们能得到相角条件
ps.(k=0,1,2,3......n-m-1)
而且考虑到
其中z为零点,p为极点,考虑到复数相除等于相角相减,所以
即
用通俗的语言来说,就是根轨迹上的点与零点连线的相角之和减去与极点相角之和等于\(\pi+2k\pi\)
出射角与入射角
现代控制理论书中对出射角的定义是出射角等于相角差的主值,但这个定义显然很难理解。
出射角可以简单理解为极点处切线与实轴正半轴夹角的值(可以类比为实值函数的导数qwq)。
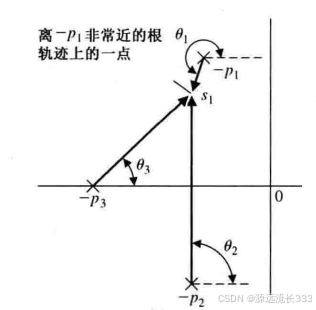
假设我们想要求\(p_1\)处对应的出射角,我们在根轨迹上取一个无限接近于\(p_1\)的点\(s_1\),这样根轨迹在\(p_1\)处切线的角度\(\theta_1\)课等效为\(p_1,s_1\)连线与实轴正半轴的夹角,即
我们考虑到\(s_1\)在根轨迹上,考虑相角条件
所以
考虑\(s_1\)无限接近于\(p_1\),将上式右边的\(s_1\)替换为\(p_1\),得
将\(p_1\)替换为更为普遍的\(p_r\),同时对\(-(2k+1)\pi\)(k=0,1,2...)进行调整,得到出射角
其中\(k=0,\pm1,\pm2...\)
同理,我们也可以得到入射角
参考资料
南京大学控制理论课程
现代控制理论,第十二版
如有错误请指正

 浙公网安备 33010602011771号
浙公网安备 33010602011771号