痞子衡嵌入式:记录i.MXRT1060驱动LCD屏显示横向渐变色有亮点问题解决全过程(解答篇)
大家好,我是痞子衡,是正经搞技术的痞子。今天痞子衡给大家分享的是i.MXRT1060上LCD横向渐变色显示出亮点问题的分析解决经验。
接上篇《一个关于LCD屏显示出异常亮点的故事(上)》咱们继续聊,上一篇发出之后,大家在我的微信公号文章下面留言很热烈,大部分朋友都把怀疑点放在了HyperRAM时序配置上,觉得很大概率是HyperRAM的数据访问出了问题导致了LCD显示异常,这个怀疑是非常合情合理的,那么从高效定位问题的角度,我们接下来应该怎么做?
一、问题分析

让我们回到上一篇的最后,痞子衡列出了所有可能出问题的地方,我们现在需要将这些疑点逐一排除:
- 客户LCD显示测试代码逻辑是否有问题?
- 客户LCD屏与i.MXRT1060连接(线序)是否有问题?
- 客户LCD屏的ST7701S驱动移植(从STM32到i.MXRT1060)是否有问题?
- 客户选用的HyperRAM本身质量是否有问题?
- i.MXRT1060配置的客户HyperRAM时序参数是否有问题?
- i.MXRT1060的LCD显示模块eLCDIF驱动是否有问题?
- i.MXRT1060系统的总线处理(如Cache、总线竞争)是否有问题?
这些怀疑点总结下来就是两类,一类是硬件问题(如2、4),另一类是软件问题(如1、3、5、6、7)。痞子衡觉得应该从软件疑点先下手。因为从现象上看,硬件上基本没啥大问题,LCD是能够按代码设计那样去显示的,而且硬件问题检查起来(可能涉及改板子或者焊接,万一整坏了板子...)不如验证软件问题来得快,等软件疑点初步排除了,再找硬件问题也不迟。
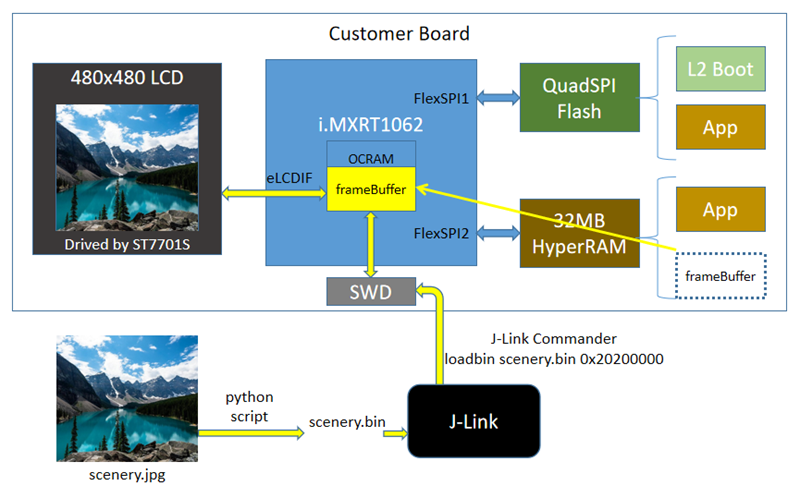
确定了从软件疑点下手,那么从哪一个开始呢?当然是大家都认为最可疑的点 - HyperRAM时序配置问题这点先入手,不过直接去检查HyperRAM时序配置较为繁琐,我们有更好的选择,uint32_t s_frameBuffer[480][480]总大小为900KB,这小于i.MXRT1060内部RAM总空间(1MB),所以我们完全可以将这个frameBuffer链接到内部RAM里来规避HyperRAM时序配置问题(疑点5)以及系统总线处理问题(疑点7),另外我们还可以直接用J-Link修改内部RAM里的frameBuffer数据来规避客户测试代码逻辑问题(疑点1)。为了方便地生成frameBuffer数据,我们还需要写个简单的Python脚本,那么我们先尝试用这一套方法在LCD上显示一个真实风景照吧。
Note: 这套验证方法的最大好处是高效且省时,不需要在App代码工程里改frameBuffer相关代码以及一次次地重新编译下载。
二、开始测试
2.1 将frameBuffer链接到内部RAM里
2.1.1 重配FlexRAM
首先是需要在App工程的startup_MIMXRT1062.s文件里修改Reset_Handler代码,增加FlexRAM重配代码,因为默认RAM配置是128KB ITCM, 128KB DTCM, 768KB OCRAM,我们要将其调整为1MB OCRAM。
__iomux_gpr16_adr EQU 0x400AC040
__iomux_gpr17_adr EQU 0x400AC044
__flexram_bank_cfg EQU 0x55555555
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;
;; Default interrupt handlers.
;;
THUMB
PUBWEAK Reset_Handler
SECTION .text:CODE:REORDER:NOROOT(2)
Reset_Handler
CPSID I ; Mask interrupts
;新增代码(开始)
LDR R0,=__iomux_gpr17_adr
MOV32 R1,__flexram_bank_cfg
STR R1,[R0]
LDR R0,=__iomux_gpr16_adr
LDR R1,[R0]
ORR R1,R1,#4
STR R1,[R0]
;新增代码(结束)
LDR R0, =0xE000ED08
LDR R1, =__vector_table
; ...
2.1.2 调整MPU设置
然后我们要在App工程的board.c文件里修改BOARD_ConfigMPU()函数,增加如下代码,确保全部1MB OCRAM地址空间(0x20200000开始)都是non-cacheable属性。
/* Region 6 setting: Memory with Normal type, not shareable, non-cacheable */
MPU->RBAR = ARM_MPU_RBAR(6, 0x20200000U);
MPU->RASR = ARM_MPU_RASR(0, ARM_MPU_AP_FULL, 1, 0, 0, 0, 0, ARM_MPU_REGION_SIZE_1MB);
2.1.3 修改链接文件
最后我们要在App工程的main函数源文件里将s_frameBuffer放在一个自定义的.frameBuffer段里,以便在App链接文件里将其放到OCRAM地址空间里(0x20200000 - 0x202FFFFF)。
main函数源文件中的修改:
__no_init uint32_t s_frameBuffer[APP_IMG_HEIGHT][APP_IMG_WIDTH] @ ".frameBuffer";
App工程链接文件中的修改:
define symbol m_data2_start = 0x20200000;
define symbol m_data2_end = 0x202FFFFF;
define region DATA2_region = mem:[from m_data2_start to m_data2_end];
place in DATA2_region { section .frameBuffer };
2.2 编写Python脚本生成frameBuffer数据
2.2.1 风景图片数据
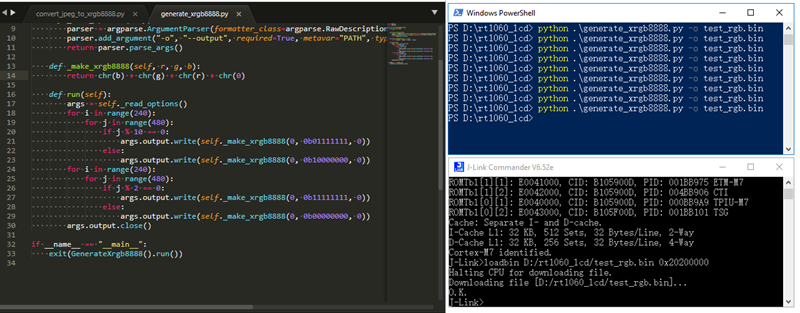
我们可以从网上找一张.jpg格式图片,将其尺寸裁剪到480x480,然后借助Pillow里的Image库将其转成XRGB8888格式的binary文件,对应Python脚本(脚本名为convert_jpeg_to_xrgb8888.py)用法和源代码如下:

import sys, os
import argparse
from PIL import Image
class ConvertJpegToXrgb8888(object):
def __init__(self):
pass
def _read_options(self):
parser = argparse.ArgumentParser(formatter_class=argparse.RawDescriptionHelpFormatter)
parser.add_argument("-o", "--output", required=True, metavar="PATH", type=argparse.FileType('wb'), help="Specify the output file.")
parser.add_argument("input", help="JPEG Image file."),
return parser.parse_args()
def run(self):
args = self._read_options()
imgObj = Image.open(args.input)
pixelBuf = imgObj.getdata()
for i in range(len(pixelBuf)):
for j in range(len(pixelBuf[i])):
args.output.write(chr(pixelBuf[i][len(pixelBuf[i]) - j - 1]))
args.output.write(chr(0))
args.output.close()
if __name__ == "__main__":
exit(ConvertJpegToXrgb8888().run())
2.2.2 RGB测试数据
此外我们还需要一个脚本,能够很容易地修改生成指定的RGB测试数据,用于定位亮点问题,对应Python脚本(脚本名为generate_xrgb8888.py)用法和源代码如下:

import sys, os
import argparse
class GenerateXrgb8888(object):
def __init__(self):
pass
def _read_options(self):
parser = argparse.ArgumentParser(formatter_class=argparse.RawDescriptionHelpFormatter)
parser.add_argument("-o", "--output", required=True, metavar="PATH", type=argparse.FileType('wb'), help="Specify the output file.")
return parser.parse_args()
def _make_xrgb8888(self, r, g, b):
return chr(b) + chr(g) + chr(r) + chr(0)
def run(self):
args = self._read_options()
for i in range(160):
for j in range(480):
args.output.write(self._make_xrgb8888(j%256, 0, 0))
for i in range(160):
for j in range(480):
args.output.write(self._make_xrgb8888(0, j%256, 0))
for i in range(160):
for j in range(480):
args.output.write(self._make_xrgb8888(0, 0, j%256))
args.output.close()
if __name__ == "__main__":
exit(GenerateXrgb8888().run())
2.3 使用J-Link将frameBuffer数据更新进OCRAM
2.3.1 显示风景图片
我们从网上随便找一张风景图片scenery.jpg,使用convert_jpeg_to_xrgb8888.py脚本将其转换为scenery.bin,然后将J-Link仿真器挂上芯片,成功连接之后,使用loadbin scenery.bin 0x20200000命令将图片数据下载进内部RAM。

这时候你可以看到LCD的显示变成了图片:

2.3.2 显示RGB测试数据
从上一节测试的真实图片显示效果上看,似乎看不出明显的亮点问题,这说明亮点在特定RGB数据内容显示的时候才会显现出来,那么我们现在的任务就是要找到这个显现条件,这时候需要修改generate_xrgb8888.py脚本来反复做实验。
所以痞子衡就不断地修改脚本、生成数据、下载数据,功夫不负有心人,痞子衡找到了亮点复现规律。
三、原因分析
痞子衡发现的亮点规律是当横向某两个连续渐变像素点RGB任一分量出现多bit由1向0跳变时(比如前一个像素点B分量是8'b01111111,后一个像素点B分量是8'b10000000),则后一个像素点必是亮点,这个亮点像素点最终显示的B分量极可能变成了8'b11111111。

所以分析下来应该是DCLK信号的极性设置在屏的驱动IC和i.MXRT1060的eLCDIF模块里不匹配,RGB数据线采样时机错了,导致实际显示的RGB数据发生了错误。
在SDK的elcdif_rgb example里关于eLCDIF模块信号输出的极性设置如下,这里需要注意的是kELCDIF_DriveDataOnRisingClkEdge是置1(即上沿数据输出,下沿数据保持的意思)。
#define APP_POL_FLAGS (kELCDIF_DataEnableActiveHigh | kELCDIF_VsyncActiveLow | kELCDIF_HsyncActiveLow | kELCDIF_DriveDataOnRisingClkEdge)
这是i.MXRT1060 eLCDIF极性配置相关:

这是OTA5180A芯片的默认极性配置时序图:
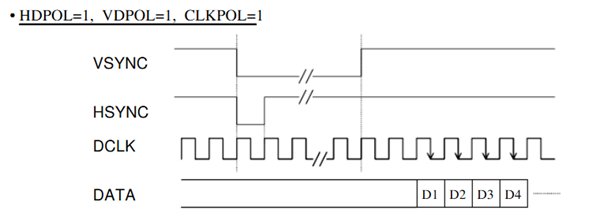
SDK里的极性设置与i.MXRT1060-EVK标配的LCD屏(RK043FN02H-CT)里的驱动芯片OTA5180A默认配置是相吻合的。
我们现在再来看看SDK里的极性设置与客户LCD屏的驱动芯片ST7701S的极性配置是否匹配,客户设置了ST7701S的IM[3:0]状态为4'b1010,即RGB模式输出,且PCLK是下沿数据输入,上沿数据保持(Latch),因此跟SDK里的极性设置是反相的。

所以最终的解决方法就是要么将ST7701S的IM[3:0]状态设为4'b0010,要么在App代码里将APP_POL_FLAGS定义改用kELCDIF_DriveDataOnFallingClkEdge。
欢迎订阅
文章会同时发布到我的 博客园主页、CSDN主页、知乎主页、微信公众号 平台上。
微信搜索"痞子衡嵌入式"或者扫描下面二维码,就可以在手机上第一时间看了哦。

最后欢迎关注痞子衡个人微信公众号【痞子衡嵌入式】,一个专注嵌入式技术的公众号,跟着痞子衡一起玩转嵌入式。



衡杰(痞子衡),目前就职于恩智浦(NXP)半导体MCU系统应用部门,担任高级嵌入式系统应用工程师。
专栏内所有文章的转载请注明出处:http://www.cnblogs.com/henjay724/
与痞子衡进一步交流或咨询业务合作请发邮件至 hengjie1989@foxmail.com
可以关注痞子衡的Github主页 https://github.com/JayHeng,有很多好玩的嵌入式项目。
关于专栏文章有任何疑问请直接在博客下面留言,痞子衡会及时回复免费(划重点)答疑。
痞子衡邮箱已被私信挤爆,技术问题不推荐私信,坚持私信请先扫码付款(5元起步)再发。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号