寻路算法
寻路算法
核心区别:代价函数的定义
理解它们关系的关键在于看它们决定下一步探索哪个节点时,所使用的代价函数。
| 算法 | 代价函数 | 含义 |
|---|---|---|
| Dijkstra | f(n) = g(n) | g(n): 从起点到当前节点 n 的实际代价。只关心已经发生的历史成本。 |
| GBFS | f(n) = h(n) | h(n): 从当前节点 n 到终点的估计代价(启发函数)。只关心未来到目标的希望。 |
| A* | f(n) = g(n) + h(n) | 同时考虑历史成本(g(n))和未来希望(h(n))。 |
这个代价函数的差异,导致了它们完全不同的行为。
1. Dijkstra 算法:严谨的实干家
- 策略:
f(n) = g(n)- 它像一个不知疲倦、严谨的实干家。它只相信已经走过的路,总是优先扩展从起点过来总实际代价最小的节点。
- 优点:保证找到最短路径。
- 缺点:没有方向性。它会以起点为中心,向所有方向“均匀”地探索,直到最终碰到目标为止。这个过程可能会很慢,因为它探索了很多不相关的区域。
搜索过程图示:像一个以起点为圆心的圆形不断向外扩散。
2. GBFS 算法:贪婪的冒险家
- 策略:
f(n) = h(n)- 它像一个被目标吸引的贪婪冒险家。它不关心已经走了多远(
g(n)),只关心“目标离我还有多远?”。它总是优先扩展离终点估计代价最近的节点。
- 它像一个被目标吸引的贪婪冒险家。它不关心已经走了多远(
- 优点:通常非常快。它非常有方向性地直奔目标而去,不会在无关区域浪费时间。
- 缺点:不保证找到最短路径。因为它忽略了已经走过的路径成本,可能会被误导进一条看似离目标很近、但实际上非常绕远的路径。
搜索过程图示:像一个被磁铁吸引的箭头,直奔目标,但可能会撞墙和绕路。
直观比喻
假设你要从北京开车去上海,寻找最短时间的路径。
- Dijkstra:它会仔细计算从北京出发,到每一个路口、每一个城市的总耗时。它不关心这个城市是不是在去上海的方向上,它只关心“从北京到这里我花了多少时间”。它会先探索所有耗时短的可能路径,最终确保找到全局最快的那条。可靠,但可能研究了去石家庄、郑州等所有方向的路。
- GBFS:它只盯着地图看“哪个城市离上海直线距离最近?”。它看到天津离上海好像近一点,就先去天津;然后从天津看,济南好像更近,就去济南……它永远选择“看起来”离目标最近的下一个点。很快,但可能不小心被引上了一条山路或者拥堵的小路,最终总时间并不是最短的。
- A*:它既会考虑“从北京开到这里已经花了多少时间”(
g(n)),也会考虑“从这里到上海估计还要花多少时间”(h(n))。它平衡了历史和未来,既高效又可靠。
总结与关系
| 特性 | Dijkstra | GBFS | A* (作为对比) |
|---|---|---|---|
| 代价函数 | f(n) = g(n) |
f(n) = h(n) |
f(n) = g(n) + h(n) |
| 保证最短路径? | 是 | 否 | 是 (如果启发函数满足条件) |
| 速度 | 慢 | 非常快 | 快 (在Dijkstra和GBFS之间) |
| 行为 | 向四周均匀扩展,无方向性 | 贪婪地直奔目标,方向性极强 | 有方向性地向目标搜索 |
关系结论:
GBFS 和 Dijkstra 是A*算法的两个极端特例:
- 当 A* 的启发函数
h(n) = 0时,A* 就退化成了 Dijkstra。 - 当 A* 的实际代价函数
g(n) = 0时,A* 就退化成了 GBFS。
因此,它们不是直接的改进关系,而是设计哲学上的取舍:
- Dijkstra 用速度换取了最优性的保证。
- GBFS 用最优性的保证换取了速度。
在实际应用中,A* 因其在速度和最优性之间的平衡而成为最常用的寻路算法。而当你需要极速找到一个“足够好”的路径,而非“最佳”路径时,GBFS 会是一个不错的选择。
寻路算法核心特性对比总表
| 算法 | 代价函数 f(n) |
数据结构 | 是否保证最短路径? | 优点 | 缺点 | 搜索行为比喻 |
|---|---|---|---|---|---|---|
| BFS | (隐含 f(n) = g(n), 且权值=1) |
队列 | 是 (等权图) | 简单,保证最短路径(步数最少) | 效率低,无方向性,内存消耗大 | 圆形涟漪:均匀地向所有方向扩散 |
| DFS | 无(按深度优先) | 栈 | 否 | 内存消耗相对少(仅存储一条路径) | 极易找到非常绕的路径,可能陷入死循环 | 钻探者:一条路走到黑,碰壁再回头 |
| Dijkstra | f(n) = g(n) | 优先队列 | 是 (带权图) | 能处理不同权重,保证最短路径(代价最小) | 比BFS/DFS慢,无方向性,探索区域大 | 严谨的实干家:不计方向,只扩展已花费代价最小的点 |
| GBFS | f(n) = h(n) | 优先队列 | 否 | 通常非常快,方向性极强 | 贪心,易被误导,结果可能非最优 | 贪婪的冒险家:只看终点方向,直奔而去 |
| A* | f(n) = g(n) + h(n) | 优先队列 | 是 (启发函数可采纳时) | 效率与最优性的完美平衡,方向性好 | 启发函数设计影响性能 | 聪明的规划师:平衡已花费代价和未来预期 |
详细分解
1. 广度优先搜索(BFS)
- 核心思想:系统性地、逐层地探索所有可能的路径。
- 数据结构:队列(FIFO)。先进先出的规则保证了先被访问的节点(即离起点更近的节点)会先被扩展。
- 与Dijkstra的关系:在所有边权值都为1的图中,BFS就是Dijkstra算法。因为此时“步数最少”就等于“代价最小”。BFS是Dijkstra在等权图下的一个高效特例实现。
- 适用场景:查找社交网络中的最短关系链、解决迷宫问题(保证最短步数)、网络爬虫等。
2. 深度优先搜索(DFS)
- 核心思想:尽可能深地探索一条路径,直到无法继续再回溯。
- 数据结构:栈(LIFO)。后进先出的规则保证了总是扩展最新发现的节点。
- 与其他算法的关系:DFS与上述寻路算法哲学完全不同。它不追求最优,而是一种暴力穷举策略。在寻路中表现很差,但适用于许多其他问题(如拓扑排序、检测环路、求解数独等)。
- 适用场景:不适合用于典型的最短路径寻路。适用于需要遍历所有可能性的场景,如排列组合、图的连通性检测。
3. Dijkstra 算法
- 核心思想:追求全局最优。它总是确信地选择当前已知的、从起点出发总实际代价最小的节点进行扩展,直到到达终点。
- 代价函数:
f(n) = g(n)。g(n)是确切的、累积的历史成本。它完全忽略目标点的位置信息。 - 适用场景:网络路由协议(如OSPF)、地图导航(当不考虑启发式信息时)、任何需要在带权图中找单源最短路径的场景。
4. 贪心最佳优先搜索(GBFS)
- 核心思想:追求局部最优(贪婪)。它总是选择“看起来”离目标最近的点,希望这样能最快到达终点。
- 代价函数:
f(n) = h(n)。h(n)是一个启发式函数,是对未来成本的估计(如直线距离)。它完全忽略已经走了多远。 - 适用场景:对路径质量要求不高、但对速度要求极高的场景,或者在大规模地图中快速找到一个“还不错”的初始解。
5. A*(A-Star)算法
- 核心思想:平衡历史成本与未来估计。它不像Dijkstra那样盲目,也不像GBFS那样冲动。它的代价函数是两部分之和。
- 代价函数:
f(n) = g(n) + h(n)。g(n):确保路径的正确性(朝着最短路径的方向努力)。h(n):引导搜索的方向性(朝着目标点的方向努力)。
- 关键:如果启发函数
h(n)是可采纳的(即永远不会高估到达目标的实际代价),则A*保证能找到最短路径。常见的h(n)有曼哈顿距离、对角线距离、欧几里得距离。 - 适用场景:绝大多数游戏AI的寻路、机器人路径规划。它是实践中最常用、最有效的寻路算法。
直观图示与总结
想象一下在迷宫中寻找出口:
- BFS:你会派出一大群人,手拉手并排向前走,确保不漏掉任何一条近路。稳妥但人力消耗大。
- DFS:你会随机选一条路一直走,走到死胡同就原路返回,再试下一个岔路口。运气好很快,运气差极慢。
- Dijkstra:你有一个精密的计步器。你每到一个路口,就计算从起点到这里的确切步数,然后总是从步数最少的路口继续探索。绝对能找到最短路径,但可能探索了太多死胡同。
- GBFS:你有一个指向终点的指南针。你永远选择指南针指向最准的方向前进。很快就能找到路,但找到的路可能不是最短的,因为你可能被一堵墙挡住,要绕很远。
- A:你既有一个计步器,又有一个指南针。你选择的标准是 “已走步数 + 指南针预估的剩余步数”最小的方向。既能高效地朝向目标,又不会偏离最短路径太远*。
最终建议:在需要寻找最短路径的场合,A* 算法通常是默认的最佳选择。理解其他算法有助于你更深刻地理解A的原理,并在特定约束下(如内存极度受限时考虑IDA,或网格地图中考虑JPS)做出更优的选择。
简单画图示意
只能上下左右走,不能斜着走。
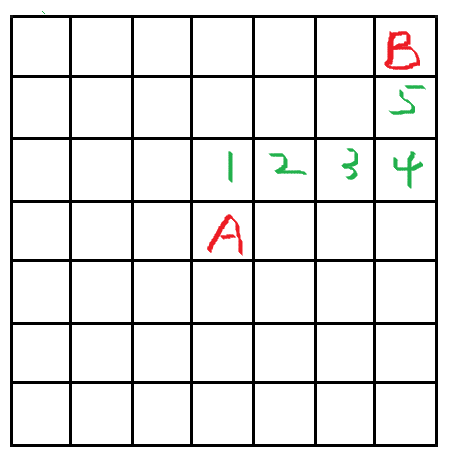
BFS
隐含 f(n) = g(n), 且权值=1,从起点到当前节点 n 的实际代价都是1,所以只有到遍历到终点才知道路径(步数最少)。
图中画的都是最少步数,其实权值都是1。
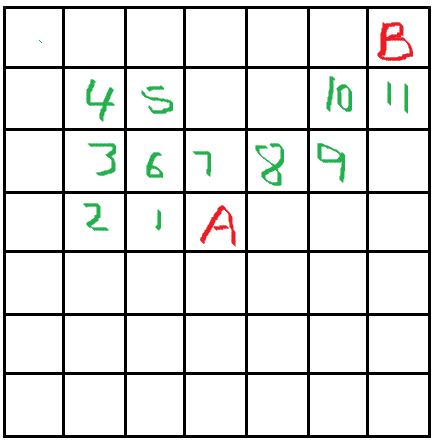
DFS
一条路走到黑,碰壁再回头。运气好直接找到一条通往终点的路径,运气不好最后一条才找到,而且路径长度不一定,可能很绕。
图中画的都是最少步数,其实权值都是1。
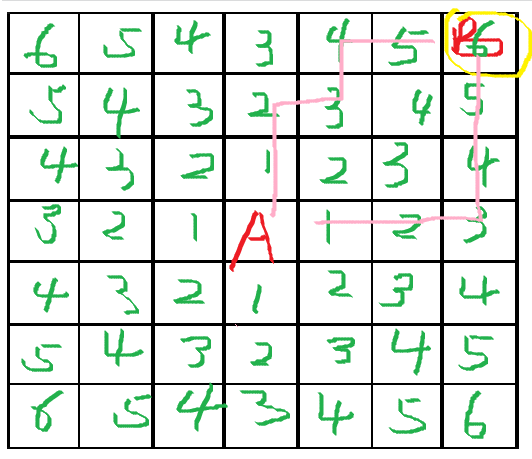
Dijkstra
f(n) = g(n),从起点到当前节点 n 的实际代价。用什么函数计算 g(n),完全取决于你的具体应用场景和想要优化的目标。可以是步数、距离、时间、能量、综合成本等等...
这里用步数计算。
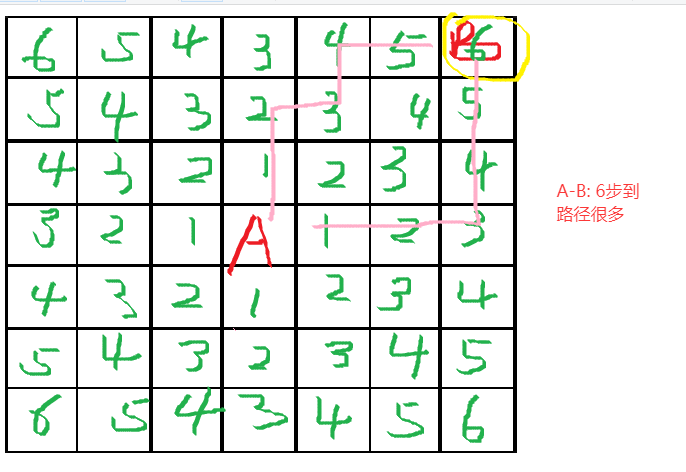
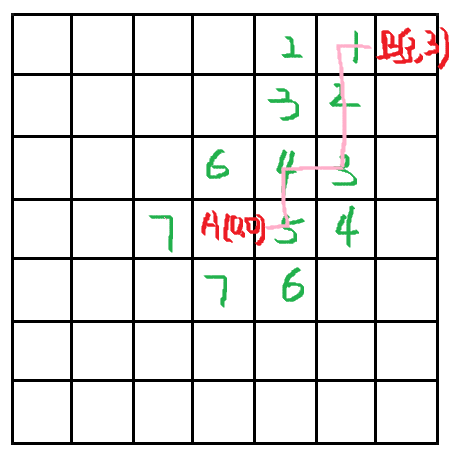
GBFS
f(n) = h(n)。h(n)是一个启发式函数,是对未来成本的估计(如直线距离)。它完全忽略已经走了多远。常见的h(n)有曼哈顿距离、对角线距离、欧几里得距离。
这里用曼哈顿距离:d(P1,P2)=∣x1−x2∣+∣y1−y2∣,例如点 A(1,2)和 B(4,6) 的距离为 ∣1−4∣+∣2−6∣=7。
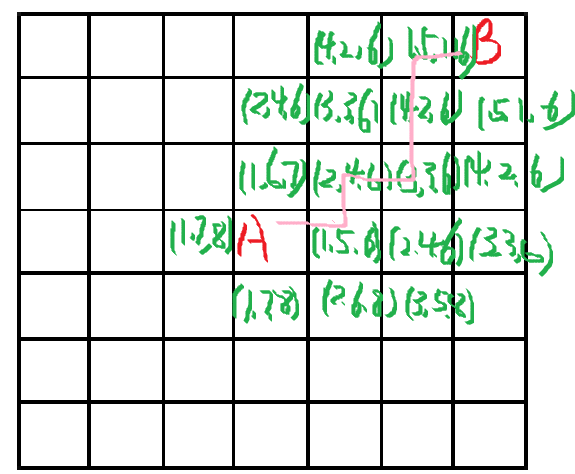
A*
f(n) = g(n) + h(n),同时考虑历史成本(g(n))和未来希望(h(n))。
h(n)是一个启发式函数,这里用曼哈顿距离:d(P1,P2)=∣x1−x2∣+∣y1−y2∣,例如点 A(1,2)和 B(4,6) 的距离为 ∣1−4∣+∣2−6∣=7。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号