五、DQN算法
1 简介
当状态或动作的数量非常庞大甚至连续时,可以认为状态动作对(state-action pair)是无限的,此时,我们无法用表格的形式(Q_table)来表示各个状态动作对的 action value。那么就需要用函数拟合的方法来估计 \(q(s,a)\),即将这个复杂的 \(q\) 值表格视作数据,使用一个参数化的函数来拟合这些数据。显然,这种函数拟合的方法存在一定的精度损失,因此被称为近似方法。本章中的 DQN 算法就是用来解决连续状态下的离散动作问题的。
2 CartPole 环境
如图所示,就是一个状态值连续,动作值离散的车杆(CartPole)环境。
在车杆环境中,有一辆小车,智能体的任务是通过左右移动保持车上的杆竖直,若杆的倾斜度数过大,或者车子离初始位置左右的偏离程度过大,或者坚持时间到达 200 帧,则游戏结束。智能体的状态是一个维数为 4 的向量,每一维都是连续的,其动作是离散的,动作空间大小为 2,详情参见下表。在游戏中每坚持一帧,智能体能获得分数为 1 的奖励,坚持时间越长,则最后的分数越高,坚持 200 帧即可获得最高的分数。
状态空间
| 维度 | 意义 | 最小值 | 最大值 |
|---|---|---|---|
| 0 | 车的位置 | -2.4 | 2.4 |
| 1 | 车的速度 | -INF | INF |
| 2 | 杆的角度 | ~-41.8° | ~41.8° |
| 3 | 杆尖端的速度 | -INF | INF |
动作空间
| 标号 | 动作 |
|---|---|
| 0 | 向左移动小车 |
| 1 | 向右移动小车 |
3 DQN 算法
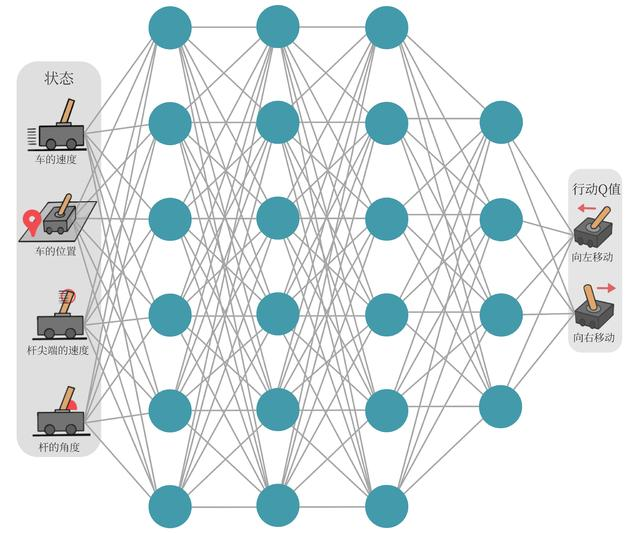
现在我们想在类似CartPole的环境中得到每个状态动作对的 \(q(s,a)\),由于车的状态是连续的,无法用表格进行记录,因此借助函数拟合(function approximation)的思想,用一条函数来表示之。考虑到神经网络强大的表达能力,我们借助神经网络拟合函数 \(Q(s,a)\),输入状态 \(s\) 和动作 \(a\),输出 action value,即 \(q(s,a)\)。
通常 DQN(以及Q-learning)只能处理动作离散的情况,因为在函数的更新过程中有 \(\underset{a}{\max}\) 这一操作,因此我们可以仅输入状态 s,使其同时输出每个动作的 \(q\) 值。
假设神经网络用来拟合函数的参数为 ω,则可以将 q 值表示为 \(Q_ω(s,a)\)。我们将用于拟合 Q 函数的神经网络称为 Q 网络,如下图所示。
对于 Q 函数的损失函数,已知 Q-learning 的更新规则:

很自然地,将损失函数构造成均方误差的形式:
至此,我们就可以将 Q-learning 扩展到神经网络形式——深度 Q 网络(deep Q network,DQN)算法。由于 DQN 是离线策略算法,因此我们在收集数据的时候可以使用一个 \(ε\)-greedy 策略来平衡探索与利用,将收集到的数据存储起来,在后续的训练中使用。DQN 中还有两个非常重要的模块——经验回放和目标网络,它们能够帮助 DQN 取得稳定、出色的性能。
3.1 经验回放
在原来的 Q-learning 算法中,每一个数据只会用来更新一次 \(Q\) 值。为了更好地将 Q-learning 和深度神经网络结合,DQN 算法采用了经验回放(experience replay)方法,具体做法为维护一个回放缓冲区,将每次从环境中采样得到的四元组数据(状态、动作、奖励、下一状态)存储到回放缓冲区中,训练 \(Q\) 网络的时候再从回放缓冲区中随机采样若干数据来进行训练。这么做可以起到以下两个作用:(1)满足独立假设,打破样本之间的相关性;(2)提高样本效率。
3.2 目标网络
已知我们的目标是最小化下面的目标函数:
因此想到使用梯度下降的方法进行优化。
考虑到函数本身就包含神经网络的输出,因此在更新网络参数的同时目标也在不断地改变,这非常容易造成神经网络训练的不稳定性。举个例子,对于某一状态-动作对 \((s,a)\),计算一次 \(q_ω(s,a)\) 后立马更新参数 \(ω\),造成的结果就是等下一次还遇到 \((s,a)\) 时,更新的目标就不再是之前的了,而由新参数下的 \(q_{ω'}(s,a)\) 来决定,这种“移动目标”不利于训练的稳定性。为了解决这一问题,DQN 便使用了目标网络(target network)的思想:既然训练过程中 Q 网络的不断更新会导致目标不断发生改变,不如暂时先将 TD 目标中的 Q 网络固定住。为了实现这一思想,我们需要利用两套 Q 网络:
(1)训练网络 \(q_ω(s,a)\):使用正常的梯度下降方法进行更新。
(2)目标网络 \(r+γmaxq_{ω_T}(s,a)\):\(ω_T\) 表示网络参数。目标网络使用训练网络中一套较旧的参数,训练网络在训练的每一步都会更新,而目标网络的参数每隔 C 步才会与训练网络同步一次,即 \(ω \leftarrow ω_T\)。这样使得目标网络相对于训练网络更加稳定。
3.3 代码
我们采用的测试环境是 CartPole-v1,其状态空间相对简单,只有 4 个变量,因此网络结构的设计也相对简单:采用一层 128 个神经元的全连接并以 ReLU 作为激活函数。当遇到更复杂的诸如以图像作为输入的环境时,我们可以考虑采用深度卷积神经网络。
我们将会用到 rl_utils 库,它包含一些专门准备的函数,如绘制移动平均曲线、计算优势函数等,不同的算法可以一起使用这些函数。rl_utils 库请参考 rl_utils.py 文件。
rl_utils.py
from tqdm import tqdm
import numpy as np
import torch
import collections
import random
class ReplayBuffer:
def __init__(self, capacity):
self.buffer = collections.deque(maxlen=capacity)
def add(self, state, action, reward, next_state, done):
self.buffer.append((state, action, reward, next_state, done))
def sample(self, batch_size):
transitions = random.sample(self.buffer, batch_size)
state, action, reward, next_state, done = zip(*transitions)
return np.array(state), action, reward, np.array(next_state), done
def size(self):
return len(self.buffer)
def moving_average(a, window_size):
cumulative_sum = np.cumsum(np.insert(a, 0, 0))
middle = (cumulative_sum[window_size:] - cumulative_sum[:-window_size]) / window_size
r = np.arange(1, window_size-1, 2)
begin = np.cumsum(a[:window_size-1])[::2] / r
end = (np.cumsum(a[:-window_size:-1])[::2] / r)[::-1]
return np.concatenate((begin, middle, end))
def train_on_policy_agent(env, agent, num_episodes):
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes/10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes/10)):
episode_return = 0
transition_dict = {'states': [], 'actions': [], 'next_states': [], 'rewards': [], 'dones': []}
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['dones'].append(done)
state = next_state
episode_return += reward
return_list.append(episode_return)
agent.update(transition_dict)
if (i_episode+1) % 10 == 0:
pbar.set_postfix({'episode': '%d' % (num_episodes/10 * i + i_episode+1), 'return': '%.3f' % np.mean(return_list[-10:])})
pbar.update(1)
return return_list
def train_off_policy_agent(env, agent, num_episodes, replay_buffer, minimal_size, batch_size):
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes/10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes/10)):
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
replay_buffer.add(state, action, reward, next_state, done)
state = next_state
episode_return += reward
if replay_buffer.size() > minimal_size:
b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)
transition_dict = {'states': b_s, 'actions': b_a, 'next_states': b_ns, 'rewards': b_r, 'dones': b_d}
agent.update(transition_dict)
return_list.append(episode_return)
if (i_episode+1) % 10 == 0:
pbar.set_postfix({'episode': '%d' % (num_episodes/10 * i + i_episode+1), 'return': '%.3f' % np.mean(return_list[-10:])})
pbar.update(1)
return return_list
def compute_advantage(gamma, lmbda, td_delta):
td_delta = td_delta.detach().numpy()
advantage_list = []
advantage = 0.0
for delta in td_delta[::-1]:
advantage = gamma * lmbda * advantage + delta
advantage_list.append(advantage)
advantage_list.reverse()
return torch.tensor(advantage_list, dtype=torch.float)
主体代码
一个很重要的点是,代码中的 Q_net 类,或者说"self.q_net(states)"、"self.target_q_net(next_states)"的返回值是一个形状为(batch_size,action_space) 的二维张量(可视为一个矩阵),其值为 action_value,即 q 值。其中,batch_size 为批次大小,也就是一次迭代所使用的样本数量,通常是从经验回放缓存(ReplayBuffer类)中随机选择的一组转移,这与我们代码中的"batch_size"是一致的,是个超参数;action_space 为动作空间大小,定义了 agent 所执行的所有可能的动作,取决于环境本身,在本章中是由 gym 库的 CartPole-v1 环境定义的。例如本章中,考虑到 batch_size=64,action_space=2,返回值就应该长这样:
import random
import gym
import numpy as np
import collections
from tqdm import tqdm
import torch
import torch.nn.functional as F
import matplotlib.pyplot as plt
import rl_utils
class ReplayBuffer:
''' 经验回放池 '''
def __init__(self, capacity):
self.buffer = collections.deque(maxlen=capacity) # 队列,先进先出
def add(self, state, action, reward, next_state, done): # 将数据加入buffer
self.buffer.append((state, action, reward, next_state, done))
def sample(self, batch_size): # 从buffer中采样数据,数量为batch_size
transitions = random.sample(self.buffer, batch_size)
# 将transitions解包,然后将同一位置的元素聚合为一个tuple,
# 因此会得到一个包含所有第一个元素的元组(state),包含所有第二元素的元组(action)...
state, action, reward, next_state, done = zip(*transitions)
return np.array(state), action, reward, np.array(next_state), done
def size(self): # 目前buffer中数据的数量
return len(self.buffer)
class Qnet(torch.nn.Module):
''' 只有一层隐藏层的Q网络 '''
def __init__(self, state_dim, hidden_dim, action_dim):
super(Qnet, self).__init__()
# 定义两个全连接层fc1和fc2
self.fc1 = torch.nn.Linear(state_dim, hidden_dim) # 接受state_dim个输入,有hidden_dim个输出
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
# 前向传播
def forward(self, x):
x = F.relu(self.fc1(x)) # 隐藏层使用ReLU激活函数
return self.fc2(x) # 输出动作的估计值
class DQN:
''' DQN算法 '''
def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma,
epsilon, target_update, device):
self.action_dim = action_dim
# Q网络(训练网络)
self.q_net = Qnet(state_dim, hidden_dim, self.action_dim).to(device)
# 目标网络
self.target_q_net = Qnet(state_dim, hidden_dim, self.action_dim).to(device)
# 使用Adam优化器
self.optimizer = torch.optim.Adam(self.q_net.parameters(), lr=learning_rate)
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # epsilon-贪婪策略
self.target_update = target_update # 目标网络更新频率
self.count = 0 # 计数器,记录更新次数
self.device = device
def take_action(self, state): # epsilon-贪婪策略采取动作
if np.random.random() < self.epsilon:
action = np.random.randint(self.action_dim)
else:
# 将state转换成PyTorch下的张量(tensor)形式
state = torch.tensor(np.array([state]), dtype=torch.float).to(self.device)
# 表示在当前state下,能获取最大q值的action,item()将tensor转到Python的标量
action = self.q_net(state).argmax().item()
return action
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device)
actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(self.device)
rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1, 1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device)
dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1, 1).to(self.device)
# .q_net(states)会计算出一批状态states下每个可能动作的q值,是一个张量
# .gather(1,actions)的1表示会从第二个维度(动作空间)中选取动作为actions的q值
q_values = self.q_net(states).gather(1, actions) # 当前状态的Q值
# target_q_net(next_states).max(1)会返回每个状态的可能动作的最大q值及其索引,用[0]取最大q值
max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1) # 下个状态的最大Q值
q_targets = rewards + self.gamma * max_next_q_values * (1 - dones) # TD误差目标
dqn_loss = torch.mean(F.mse_loss(q_values, q_targets)) # 均方误差损失函数,再取均值
self.optimizer.zero_grad() # PyTorch中默认梯度会累积,这里需要显式将梯度置为0
dqn_loss.backward() # 反向传播更新参数
self.optimizer.step() # 根据梯度更新神经网络参数,一般为参数=参数-学习率*梯度
# 更新目标网络
if self.count % self.target_update == 0:
# state_dict()获取训练神经网络参数ω,load_state_dict()加载到目标网络
self.target_q_net.load_state_dict(
self.q_net.state_dict())
self.count += 1
lr = 2e-3
num_episodes = 500
hidden_dim = 128
gamma = 0.98
epsilon = 0.01
target_update = 10
buffer_size = 10000
minimal_size = 500
batch_size = 64
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
env_name = 'CartPole-v1'
env = gym.make(env_name, new_step_api=True)
random.seed(0)
np.random.seed(0)
env.reset(seed=0)
torch.manual_seed(0)
replay_buffer = ReplayBuffer(buffer_size)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = DQN(state_dim, hidden_dim, action_dim, lr, gamma, epsilon, target_update, device)
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)):
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, terminated, truncated, _ = env.step(action)
if terminated or truncated:
done = True
replay_buffer.add(state, action, reward, next_state, done)
state = next_state
episode_return += reward
# 当buffer数据的数量超过一定值后,才进行Q网络训练
if replay_buffer.size() > minimal_size:
# 利用经验回放池采样
b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)
transition_dict = {
'states': b_s,
'actions': b_a,
'next_states': b_ns,
'rewards': b_r,
'dones': b_d
}
agent.update(transition_dict)
return_list.append(episode_return)
if (i_episode + 1) % 10 == 0:
pbar.set_postfix({
'episode':
'%d' % (num_episodes / 10 * i + i_episode + 1),
'return':
'%.3f' % np.mean(return_list[-10:])
})
pbar.update(1)
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list, return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('DQN on {}'.format(env_name))
plt.show()
mv_return = rl_utils.moving_average(return_list, 9)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('DQN on {}'.format(env_name))
plt.show()
Iteration 0: 100%|█████████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 950.36it/s, episode=50, return=9.000]
Iteration 1: 100%|████████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 67.96it/s, episode=100, return=14.500]
Iteration 2: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:04<00:00, 12.13it/s, episode=150, return=117.500]
Iteration 3: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:12<00:00, 4.09it/s, episode=200, return=184.500]
Iteration 4: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:11<00:00, 4.37it/s, episode=250, return=195.800]
Iteration 5: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:13<00:00, 3.80it/s, episode=300, return=248.300]
Iteration 6: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:17<00:00, 2.80it/s, episode=350, return=320.300]
Iteration 7: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:20<00:00, 2.42it/s, episode=400, return=373.500]
Iteration 8: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:24<00:00, 2.06it/s, episode=450, return=393.400]
Iteration 9: 100%|███████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:22<00:00, 2.23it/s, episode=500, return=361.800]
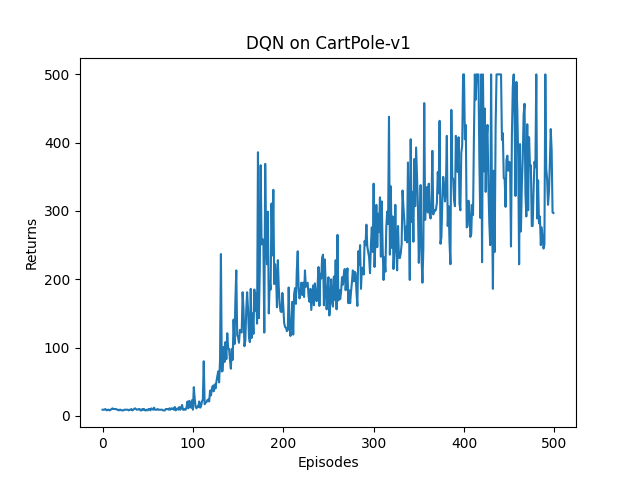

可以看到,DQN 的性能在 100 个序列后很快得到提升,但之后会持续出现一定程度的震荡,这主要是神经网络过拟合到一些局部经验数据后由运算带来的影响。
参考资料
https://hrl.boyuai.com/chapter/2/dqn算法/
https://www.bilibili.com/video/BV1sd4y167NS?p=39&vd_source=f7563459deb4ecb3add61713c7d5d111

 浙公网安备 33010602011771号
浙公网安备 33010602011771号