L1正则化及其推导
\(L1\)正则化及其推导
在机器学习的Loss函数中,通常会添加一些正则化(正则化与一些贝叶斯先验本质上是一致的,比如\(L2\)正则化与高斯先验是一致的、\(L1\)正则化与拉普拉斯先验是一致的等等,在这里就不展开讨论)来降低模型的结构风险,这样可以使降低模型复杂度、防止参数过大等。大部分的课本和博客都是直接给出了\(L1\)正则化的解释解或者几何说明来得到\(L1\)正则化会使参数稀疏化,本来会给出详细的推导。
\(L1\)正则化
大部分的正则化方法是在经验风险或者经验损失\(L_{emp}\)(emprirical loss)上加上一个结构化风险,我们的结构化风险用参数范数惩罚\(\Omega(\theta)\),用来限制模型的学习能力、通过防止过拟合来提高泛化能力。所以总的损失函数(也叫目标函数)为:
其中\(X\)是输入数据,\(y\)是标签,\(\theta\)是参数,\(\alpha \in [0,+\infty]\)是用来调整参数范数惩罚与经验损失的相对贡献的超参数,当\(\alpha = 0\)时表示没有正则化,\(\alpha\)越大对应该的正则化惩罚就越大。对于\(L1\)正则化,我们有:
其中\(w\)是模型的参数。
几何解释
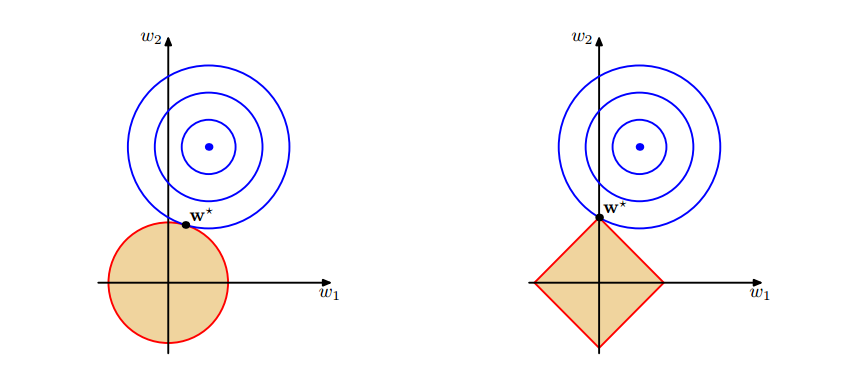
可以看到在正则化的限制之下,\(L2\)正则化给出的最优解\(w^*\)是使解更加靠近原点,也就是说\(L2\)正则化能降低参数范数的总和。\(L1\)正则化给出的最优解\(w^*\)是使解更加靠近某些轴,而其它的轴则为0,所以\(L1\)正则化能使得到的参数稀疏化。
解析解的推导
有没有偏置的条件下,\(\theta\)就是\(w\),结合式\((1.1)\)与\((1.2)\),我们可以得到\(L1\)正则化的目标函数:
我们的目的是求得使目标函数取最小值的\(w^*\),上式对\(w\)求导可得:
其中若\(w>0\),则\(sign(w)=1\);若\(w<0\),则\(sign(w) = -1\);若\(w=0\),则\(sign(w)=0\)。当\(\alpha = 0\),假设我们得到最优的目标解是\(w^*\),用秦勤公式在\(w^*\)处展开可以得到(要注意的\(\nabla J(w^*)=0\)):
其中\(H\)是关于\(w\)的Hessian矩阵,为了得到更直观的解,我们简化\(H\),假设\(H\)这对角矩阵,则有:
将上式代入到式\((3.1)\)中可以得到,我们简化后的目标函数可以写成这样:
从上式可以看出,\(w\)各个方向的导数是不相关的,所以可以分别独立求导并使之为0,可得:
我们先直接给出上式的解,再来看推导过程:
从式\((3.5)\)与式\((3.6)\)可以得到两点:
- 1.可以看到式\((3.5)\)中的二次函数是关于\(w^*\)对称的,所以若要使式\((3.5)\)最小,那么必有:\(|w_i|<|w^*|\),因为在二次函数值不变的程序下,这样可以使得\(\alpha|w_i|\)更小。
- 2.\(sign(w_i)=sign(w_i^*)\)或\(w_1=0\),因为在\(\alpha|w_i|\)不变的情况下,\(sign(w_i)=sign(w_i^*)\)或\(w_i=0\)可以使式\((3.5)\)更小。
由式\((3.6)\)与上述的第2点:\(sign(w_i)=sign(w_i^*)\)可以得到:
我们再来看一下第2点:\(sign(w_i)=sign(w_i^*)\)或\(w_1=0\),若\(|w_i^*| < \frac{\alpha}{H_{i,i}}\),那么有\(sign(w_i) \neq sign(w_i^*)\),所以这时有\(w_1=0\),由于可以直接得到解式\((3.7)\)。
从这个解可以得到两个可能的结果:
- 1.若\(|w_i^*| \leq \frac{\alpha}{H_{i,i}}\),正则化后目标中的\(w_i\)的最优解是\(w_i=0\)。因为这个方向上\(L_{emp}(w; X, y)\)的影响被正则化的抵消了。
- 2.若\(|w_i^*| > \frac{\alpha}{H_{i,i}}\),正则化不会推最优解推向0,而是在这个方面上向原点移动了\(\frac{\alpha}{H_{i,i}}\)的距离。
【防止爬虫转载而导致的格式问题——链接】:http://www.cnblogs.com/heguanyou/p/7582578.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号