
第4章 IWDG介绍及应用
第四章 IWDG介绍及应用
1. IWDG简介
IWDG(Independent Watchdog,独立看门狗)是 STM32H750VBT6 的硬件级系统保护机制,用于在程序跑飞、死循环或系统卡死时强制复位 MCU,确保嵌入式系统长期运行的可靠性。其核心特点是独立于主时钟系统(由专用低速 LSI 时钟驱动),即使主时钟失效或 CPU 锁死仍能工作,是工业控制、汽车电子等关键场景的必备安全外设。
🔍 关键区别:
- IWDG = 独立看门狗(LSI 时钟驱动,不可停止,简单可靠)
- WWDG = 窗口看门狗(APB 时钟驱动,有窗口期限制,更精确)
IWDG 适用于基础看护,WWDG 适用于对喂狗时机有严格要求的场景
1.1 IWDG 核心特性(STM32H750VBT6)
| 特性 | 参数 | 说明 | 安全价值 |
|---|---|---|---|
| 时钟源 | LSI (32 kHz) | 内部低速时钟(独立于 HSE/HSI),典型频率 32 kHz(实际 30–34 kHz) | 主时钟失效时仍可触发复位 |
| 计数器 | 12-bit 递减计数器 | 从 IWDG_RLR 值递减至 0 触发复位 |
计数范围 0x000–0xFFF(4095) |
| 预分频器 | 4-bit (6 个分频系数) | 分频系数:4, 8, 16, 32, 64, 128, 256 |
灵活配置超时时间(ms 级到秒级) |
| 复位时间 | Tout = (4×2PR / LSI) × (RLR+1) | 最长超时:PR=6 (256), RLR=4095 → ≈ 32.7 秒 |
适应不同系统恢复需求 |
| 写保护 | 关键寄存器锁 | 配置需先写 IWDG_KR = 0x5555 解锁 |
防止误操作导致看门狗失效 |
| 启动机制 | 硬件/软件启动 | 复位后默认关闭,需软件显式启动 | 避免调试时意外复位 |
📌 STM32H750VBT6 安全设计:
- 不可停止性:一旦启动,只能通过系统复位关闭(即使 CPU 锁死)
- 低电压容错:在 VDD > 1.65V 时仍可工作(符合功能安全标准)
- 双阶段保护:
1️⃣ 计数器溢出 → 触发IWDG_PR错误中断(可记录故障)
2️⃣ 计数器归零 → 产生系统复位(强制恢复)
1.2 工作原理详解
1.2.1 时钟与计数逻辑
graph LR
A[LSI 32kHz] --> B{预分频器 PR}
B -->|4/8/16/32/64/128/256| C[分频时钟]
C --> D[12-bit 递减计数器]
D -->|计数 > 0| E[正常运行]
D -->|计数 = 0| F[系统复位]
-
分频计算:
PR = 0→ 分频系数 = 4 → 时钟 = 32kHz / 4 = 8 kHzPR = 32→ 分频系数 = 32 → 时钟 = 32kHz / 32 = 1 kHz
-
超时时间公式:
Tout = (4 × 2PR × (RLR + 1)) / LSI_Freq
示例:PR=32 (32分频), RLR=999, LSI=32kHz → Tout = (32 × 1000) / 32000 = 1 秒
1.2.2 关键状态转换
stateDiagram-v2
[*] --> DISABLED: 复位后默认状态
DISABLED --> ENABLED: 写 KR=0xCCCC 启动
ENABLED --> RUNNING: 计数器递减
RUNNING --> RESET: 计数器归零
RUNNING --> RELOAD: 喂狗操作(写 KR=0xAAAA)
RELOAD --> RUNNING: 计数器重载 RLR 值
⚠️ 硬件强制规则:
- 启动后必须在计数归零前喂狗,否则触发复位
- 喂狗操作有最小间隔限制(需 > 4 个 LSI 周期 ≈ 125 μs)
- LSI 频率偏差(±10%)导致超时时间波动,需留安全裕量
1.3 关键寄存器操作
1.3.1 核心寄存器与配置步骤
| 寄存器 | 关键位/值 | 功能 | 操作顺序 |
|---|---|---|---|
| KR (Key Register) | 0x5555 |
解锁 PR/RLR 配置 | 第一步:解锁寄存器 |
0xAAAA |
喂狗(重载计数器) | 周期性操作 | |
0xCCCC |
启动 IWDG | 最后一步:启动看门狗 | |
| PR (Prescaler) | 0x0-0x6 |
设置分频系数 (4→256) | 1. 解锁后配置 |
| RLR (Reload) | 0x000-0xFFF |
设置重载值(计数初值) | 2. 配置重载值 |
| SR (Status) | PVU=1 |
预分频器更新中 | 检查是否可写 PR |
RVU=1 |
重载值更新中 | 检查是否可写 RLR | |
WVU=1 |
窗口值更新中 | (IWDG 无窗口功能) |
1.3.2 配置流程(寄存器级)
// 1. 解锁关键寄存器 (必须先解锁)
IWDG->KR = 0x5555;
// 2. 配置预分频器 (PR) - 选择分频系数 32 (PR=3)
while (IWDG->SR & IWDG_SR_PVU); // 等待 PR 更新完成
IWDG->PR = 3; // 0b011 = 32 分频
// 3. 配置重载值 (RLR) - 1秒超时 (LSI=32kHz)
while (IWDG->SR & IWDG_SR_RVU); // 等待 RLR 更新完成
IWDG->RLR = 999; // (32 * 1000) / 32 = 1000 → 1秒
// 4. 启动 IWDG (最后一步!)
IWDG->KR = 0xCCCC;
// 5. 喂狗操作 (在计数归零前重复执行)
IWDG->KR = 0xAAAA; // 重载计数值
2. IWDG使用示例-STM32IDE
2.1 STM32Cube配置
2.1.1 RCC配置
只在第一章中展示,因为后续内容一样
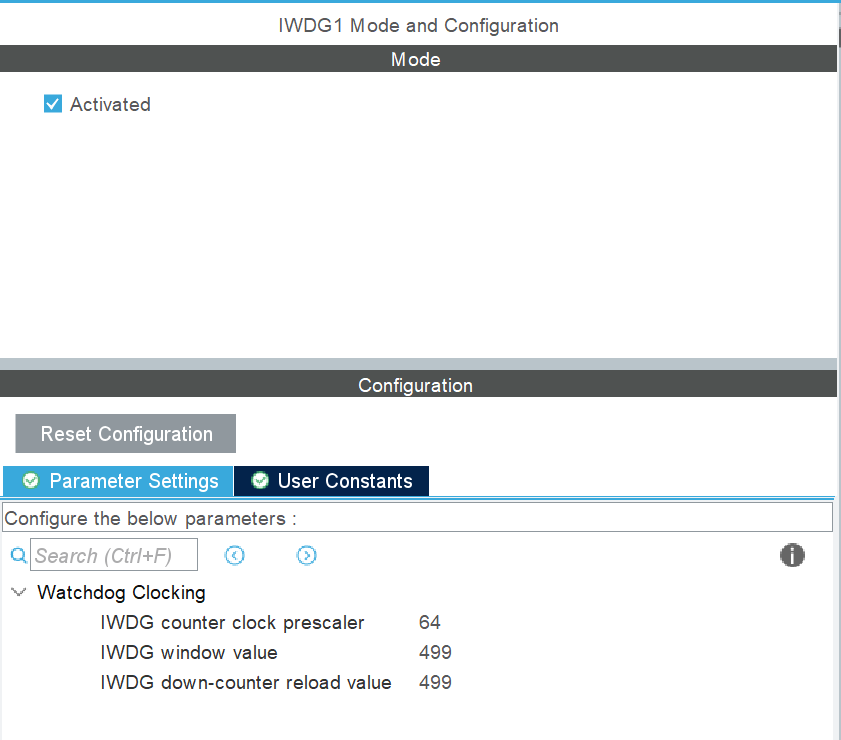
2.1.2 IWDG配置
2.2 用户代码
2.2.1 IWDG初始化
#include "iwdg.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
IWDG_HandleTypeDef hiwdg1;
/* IWDG1 init function */
void MX_IWDG1_Init(void)
{
/* USER CODE BEGIN IWDG1_Init 0 */
/* USER CODE END IWDG1_Init 0 */
/* USER CODE BEGIN IWDG1_Init 1 */
/* USER CODE END IWDG1_Init 1 */
hiwdg1.Instance = IWDG1;
hiwdg1.Init.Prescaler = IWDG_PRESCALER_64;
hiwdg1.Init.Window = 499;
hiwdg1.Init.Reload = 499;
if (HAL_IWDG_Init(&hiwdg1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN IWDG1_Init 2 */
/* USER CODE END IWDG1_Init 2 */
}
2.2.2 喂狗函数
/* USER CODE BEGIN 1 */
void iwdg_feed(void)
{
HAL_IWDG_Refresh(&hiwdg1);
}
/* USER CODE END 1 */
2.2.3 主函数测试
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "iwdg.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "bsp_init.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MPU_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* USER CODE BEGIN 2 */
bsp_init();
/* USER CODE END 2 */
HAL_GPIO_WritePin(LED_BLUE_Port, LED_BLUE_Pin, RESET); // 不喂狗会熄灭,然后重新初始化
printf("IWDG Reset Example\r\n");
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
iwdg_feed();
HAL_Delay(500); // 喂狗间隔500ms
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 2;
RCC_OscInitStruct.PLL.PLLN = 240;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
3. IWDG相关函数总结(HAL库)
3.1 初始化与配置
-
HAL_IWDG_Init(IWDG_HandleTypeDef *hiwdg)
初始化独立看门狗(IWDG),关键前提:- 无需使能时钟(IWDG由LSI自动驱动)
- 仅需配置一次,启动后不可停止(除非系统复位)
-
IWDG_InitTypeDef结构体成员说明:成员 说明 有效范围 H750特殊值 PrescalerLSI时钟预分频系数 IWDG_PRESCALER_4到IWDG_PRESCALER_256推荐 IWDG_PRESCALER_32Reload计数器重载值 0x000-0xFFF 常用0xFFF(4095) Window窗口值(IWDG不使用) 0x000-0xFFF 固定 0x0000 -
超时时间计算公式(核心!):
超时时间 = (Prescaler × (Reload + 1)) / LSI频率H750典型配置:
// LSI ≈ 32kHz (实际26-34kHz,需校准) hiwdg.Instance = IWDG; hiwdg.Init.Prescaler = IWDG_PRESCALER_32; // 32分频 → 1kHz计数时钟 hiwdg.Init.Reload = 4095; // 4096计数 → 超时4.096秒 HAL_IWDG_Init(&hiwdg); // 实际超时≈3.5-4.5秒 -
预分频系数对照表:
宏定义 分频值 适用场景 IWDG_PRESCALER_44 超短超时(毫秒级) IWDG_PRESCALER_88 IWDG_PRESCALER_1616 IWDG_PRESCALER_3232 推荐默认值 IWDG_PRESCALER_6464 IWDG_PRESCALER_128128 IWDG_PRESCALER_256256 最长超时(约30秒)
3.2 看门狗操作核心函数
-
HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
喂狗操作(必须定期调用):HAL_IWDG_Refresh(&hiwdg); // 重置计数器为Reload值✅ 最佳实践:在主循环关键位置调用,避免任务阻塞导致漏喂
-
状态与错误检测:
HAL_IWDG_GetState(&hiwdg); // 返回值:HAL_IWDG_STATE_BUSY等 HAL_IWDG_GetError(&hiwdg); // 获取错误代码(如HAL_IWDG_ERROR_TIMEOUT) -
底层寄存器操作宏(调试用):
__HAL_IWDG_START(&hiwdg); // 手动启动IWDG(通常不需要) __HAL_IWDG_RELOAD_COUNTER(&hiwdg); // 等效于Refresh() __HAL_IWDG_GET_COUNTER(&hiwdg); // 读取当前计数值
3.3 高级功能与特性
-
低功耗模式行为:
模式 IWDG状态 注意事项 RUN 正常计数 SLEEP 继续计数 无影响 STOP0/STOP1 暂停计数 需在唤醒后立即喂狗 STOP2 暂停计数 唤醒后需重载计数器 STANDBY 完全关闭 复位后需重新配置 -
硬件复位特性:
- IWDG超时触发系统复位(非CPU复位)
- 可通过
__HAL_RCC_GET_FLAG(RCC_FLAG_IWDGRST)检测复位源
if (__HAL_RCC_GET_FLAG(RCC_FLAG_IWDGRST)) { // IWDG导致的复位 __HAL_RCC_CLEAR_RESET_FLAGS(); // 清除标志 } -
调试模式冻结:
__HAL_DBGMCU_FREEZE_IWDG(); // 调试时暂停IWDG(JTAG连接时) __HAL_DBGMCU_UNFREEZE_IWDG(); // 恢复计数✅ 开发建议:调试阶段启用冻结,避免频繁复位
3.4 使用示例(完整流程)
IWDG_HandleTypeDef hiwdg = {0};
// 1. 配置IWDG参数(超时≈4.1秒)
hiwdg.Instance = IWDG;
hiwdg.Init.Prescaler = IWDG_PRESCALER_32; // LSI/32 ≈ 1kHz
hiwdg.Init.Reload = 4095; // 4096计数
hiwdg.Init.Window = 0x0000; // IWDG不使用窗口
// 2. 初始化并启动IWDG
if (HAL_IWDG_Init(&hiwdg) != HAL_OK) {
Error_Handler(); // 初始化失败(通常因IWDG已启动)
}
// 3. 主循环中定期喂狗(示例:每2秒喂一次)
while (1) {
// ... 业务逻辑代码 ...
// 安全喂狗条件:关键任务完成且无错误
if (critical_task_completed && !system_error) {
HAL_IWDG_Refresh(&hiwdg);
}
HAL_Delay(2000); // 间隔必须<超时时间
}
4. 关键注意事项
- 不可逆启动特性:
- 一旦调用
HAL_IWDG_Init(),IWDG将永久运行直至系统复位 - 错误示例:在复位后多次调用Init() → 导致第二次初始化失败
- LSI时钟精度问题(H750关键):
| LSI典型值 | 实际范围 | 对超时影响 |
|---|---|---|
| 32kHz | 26-34kHz | 超时时间偏差±15% |
| 建议方案: |
- 生产环境使用
IWDG_PRESCALER_32+Reload=1024(目标1秒超时) - 通过RTC校准LSI:
__HAL_RCC_CALCULATE_HSI48CLK_FREQ()
- 低功耗模式陷阱:
-
STOP2模式唤醒后必须立即喂狗:
HAL_PWREx_EnableInternalWakeUpLine(); // 使能内部唤醒 HAL_SuspendTick(); // 暂停SysTick HAL_PWR_EnterSTOP2Mode(PWR_STOPENTRY_WFE); // 唤醒后关键操作 SystemClock_Config(); // 重配时钟 HAL_IWDG_Refresh(&hiwdg); // 立即喂狗! HAL_ResumeTick(); // 恢复SysTick
- 多任务系统喂狗策略:
// 任务1监护标志
static volatile uint8_t task1_alive = 0;
// 任务1执行时置位
void Task1(void) {
task1_alive = 1;
// ... 任务逻辑 ...
}
// 主循环综合判断
if(task1_alive && task2_status_ok) {
HAL_IWDG_Refresh(&hiwdg);
task1_alive = 0; // 清除标志
}
✅ 安全设计:只有所有关键任务正常运行才喂狗
- 复位源分析技巧:
void Check_Reset_Source(void)
{
if (__HAL_RCC_GET_FLAG(RCC_FLAG_IWDGRST)) {
log_error("IWDG Reset! Last task: %d", last_active_task);
}
__HAL_RCC_CLEAR_RESET_FLAGS();
}
4.1 H750特有优化技巧
| 场景 | 解决方案 | 优势 | 实现代码 |
|---|---|---|---|
| 精确超时 | LSI校准 + 动态调整Reload | 超时误差<5% | `RCC->CSR |
| STOP2唤醒 | 唤醒后立即喂狗 | 避免虚假复位 | HAL_PWREx_EnableInternalWakeUpLine(); HAL_IWDG_Refresh(); |
| 多级看门狗 | IWDG(WWDG配合) | 捕获不同层级故障 | WWDG监控实时任务,IWDG监控整体系统 |
| 调试安全 | JTAG连接时冻结IWDG | 避免调试中断复位 | __HAL_DBGMCU_FREEZE_IWDG(); |
避坑指南:
- 禁止在中断中喂狗:
- 中断可能永远不退出导致系统假死
- 正确做法:设置全局标志,主循环检查后喂狗
- 超时时间选择原则:
- 必须 > 最大任务执行时间 × 1.5
- 示例:系统最长任务2秒 → 超时至少设为3秒
- H750复位电路特殊性:
- IWDG复位会清除备份寄存器(但RTC可保留)
- 需通过
__HAL_RCC_GET_FLAG(RCC_FLAG_BORRST)区分电源复位
4.2 WDG工作流程图解
┌──────────────┐ ┌─────────────┐ ┌─────────────┐
│ LSI 32kHz │→ │ 预分频器 │→ │ 计数器递减 │
└──────────────┘ └─────────────┘ └─────────────┘
│ │ │
↓ ↓ ↓
┌──────────────┐ ┌─────────────┐ ┌─────────────┐
│ 时钟校准模块 │ │ 分频配置 │ │ 超时比较 │
└──────────────┘ └─────────────┘ └─────────────┘
│
▼
┌─────────────┐
│ 系统复位 │←──(计数器=0)
└─────────────┘

 浙公网安备 33010602011771号
浙公网安备 33010602011771号