
第5章 FreeRTOS任务切换
第五章 FreeRTOS任务切换
1. PendSV异常
PendSV(Pended Service Call,可挂起服务调用),是一个对 RTOS 非常重要的异常。 PendSV的中断优先级是可以编程的,用户可以根据实际的需求,对其进行配置。 PendSV 的中断由将中断控制状态寄存器(ICSR)中 PENDSVSET 为置一触发。PendSV 与 SVC 不同, PendSV 的中断是非实时的,即 PendSV 的中断可以在更高优先级的中断中触发,但是在更高优先级中断结束后才执行。
利用 PendSV 的这个可挂起特性,在设计 RTOS 时,可以将 PendSV 的中断优先级设置为最低的中断优先级,这么一来, PendSV 的中断服务函数就会在其他所有中断处理完成后才执行。任务切换时,就需要用到 PendSV 的这个特性。
首先,来看一下任务切换的一些基本概念,在典型的 RTOS 中,任务的处理时间被分为多个时间片, OS 内核的执行可以有两种触发方式,一种是通过在应用任务中通过 SVC 指令触发,例如在应用任务在等待某个时间发生而需要停止的时候,那么就可以通过 SVC 指令来触发 OS内核的执行,以切换到其他任务;第二种方式是, SysTick 周期性的中断,来触发 OS 内核的执行。 下图演示了只有两个任务的 RTOS 中,两个任务交替执行的过程:
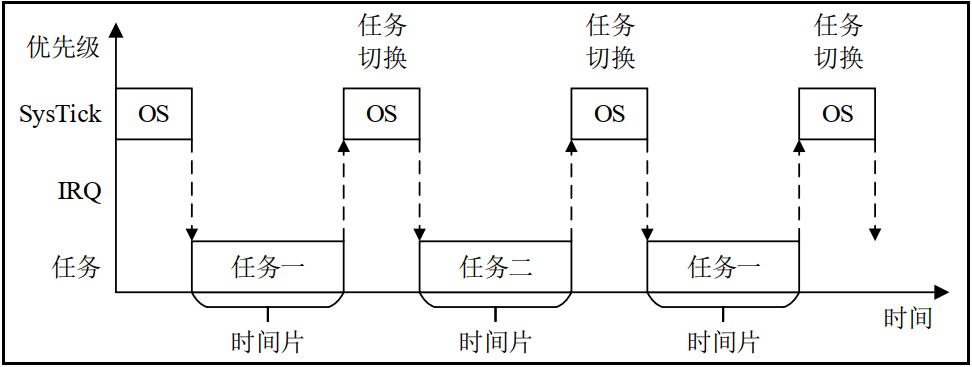
在操作系统中,任务调度器决定是否切换任务。图中的任务及切换都是在 SysTick 中断中完成的, SysTick 的每一次中断都会切换到其他任务。
如果一个中断请求(IRQ)在 SysTick 中断产生之前产生,那么 SysTick 就可能抢占该中断请求,这就会导致该中断请求被延迟处理,这在实时操作系统中是不允许的,因为这将会影响到实时操作系统的实时性,如下图所示:
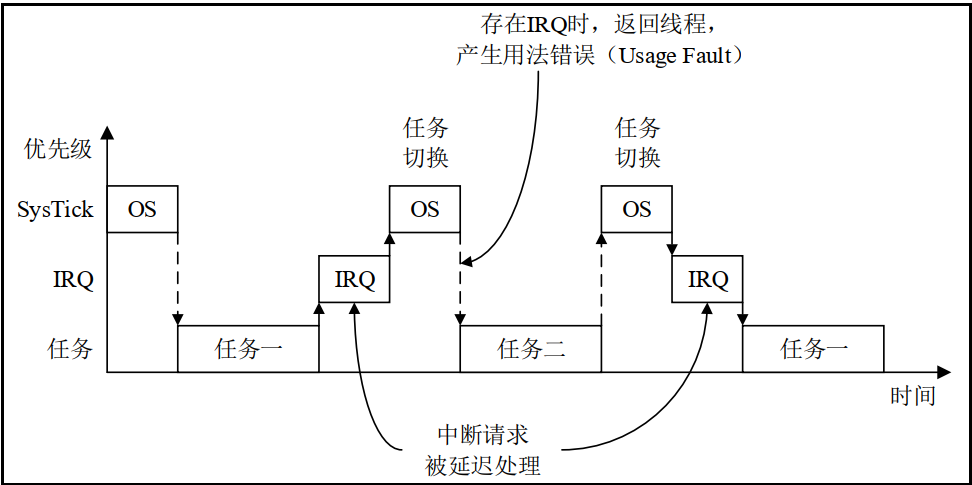
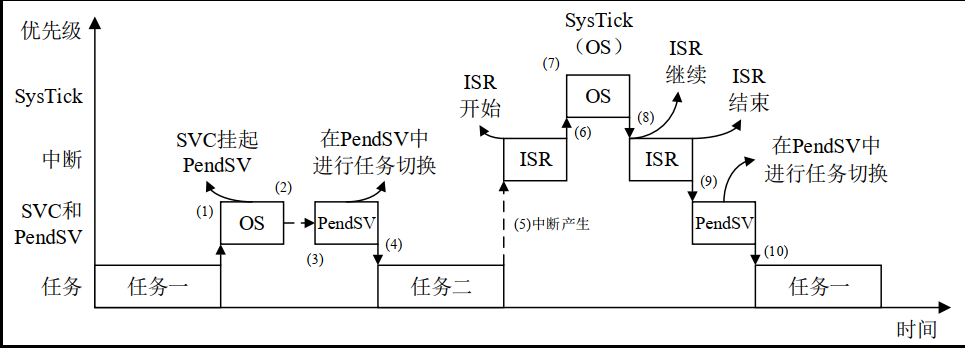
并且,当 SysTick 完成任务的上下文切换,准备返回任务中运行时,由于存在中断请求, ARM Cortex-M 不允许返回线程模式,因此,将会产生用法错误异常(Usage Fault)。在一些 RTOS 的设计中,会通过判断是否存在中断请求,来决定是否进行任务切换。虽然可以通过检查 xPSR 或 NVIC 中的中断活跃寄存器来判断是否存在中断请求,但是这样可能会影响系统的性能,甚至可能出现中断源在 SysTick 中断前后不断产生中断请求,导致系统无法进行任务切换的情况。PendSV 通过延迟执行任务切换,直到处理完所有的中断请求,以解决上述问题。为了达到这样的效果,必须将 PendSV 的中断优先级设置为最低的中断优先等级。如果操作系统决定切换任务,那么就将 PendSV 设置为挂起状态,并在 PendSV 的中断服务函数中执行任务切换,如下图所示:
-
任务一触发 SVC 中断以进行任务切换(例如,任务一正等待某个事件发生)。
-
系统内核接收到任务切换请求,开始准备任务切换,并挂起 PendSV 异常。
-
当退出 SVC 中断的时候,立刻进入 PendSV 异常处理,完成任务切换。
-
当 PendSV 异常处理完成,返回线程模式,开始执行任务二。
-
中断产生,并进入中断处理函数。
-
当运行中断处理函数的时候, SysTick 异常(用于内核时钟节拍) 产生。
-
操作系统执行必要的操作,然后挂起 PendSV 异常,准备进行任务切换。
-
当 SysTick 中断处理完成,返回继续处理中断。
-
当中断处理完成,立马进入 PendSV 异常处理,完成任务切换。
-
当 PendSV 异常处理完成,返回线程模式,继续执行任务一。
PendSV在RTOS的任务切换中,起着至关重要的作用, FreeRTOS的任务切换就是在PendSV中完成的。
2. 时间片调度测试
2.1 任务配置
/*----------------任务配置区-----------------*/
// START_TASK配置
#define START_TASK_PRIO 1 // 任务优先级
#define START_STK_SIZE 128 // 任务堆栈大小
TaskHandle_t StartTask_Handler; // 任务句柄
void start_task(void *pvParameters);// 任务函数
// TASK1配置
#define TASK1_PRIO 2
#define TASK1_STK_SIZE 128
TaskHandle_t Task1Task_Handler;
void task1(void *pvParameters);
// TASK2配置
#define TASK2_PRIO 2 // 相同任务优先级
#define TASK2_STK_SIZE 128
TaskHandle_t Task2Task_Handler;
void task2(void *pvParameters);
/*-------------------------------------------*/
2.2 任务实现
/*------------------任务实现区----------------*/
void freertos_demo(void)
{
lcd_show_string(10,47,220,24,24,"Task Demo",RED);
// 创建START_TASK任务
xTaskCreate((TaskFunction_t)start_task, // 任务函数
(const char*)"start_task", // 任务名称
(uint16_t)START_STK_SIZE, // 任务堆栈大小
(void*)NULL, // 传递给任务函数的参数
(UBaseType_t)START_TASK_PRIO, // 任务优先级
(TaskHandle_t*)&StartTask_Handler);// 任务句柄
// 开始任务调度
vTaskStartScheduler();
}
// start_task函数实现
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); // 进入临界区
// 创建TASK1任务
xTaskCreate((TaskFunction_t)task1,
(const char*)"task1",
(uint16_t)TASK1_STK_SIZE,
(void*)NULL,
(UBaseType_t)TASK1_PRIO,
(TaskHandle_t*)&Task1Task_Handler);
xTaskCreate((TaskFunction_t)task2,
(const char*)"task2",
(uint16_t)TASK2_STK_SIZE,
(void*)NULL,
(UBaseType_t)TASK2_PRIO,
(TaskHandle_t*)&Task2Task_Handler);
vTaskDelete(StartTask_Handler); // 开始任务已经完成自己使命,删除自己
taskEXIT_CRITICAL(); // 退出临界区
}
// task1函数实现
void task1(void *pvParameters)
{
uint32_t task1_num = 0;
while(1)
{
taskENTER_CRITICAL(); // 进入临界区
printf("任务1运行次数:%d\r\n",++task1_num);
taskEXIT_CRITICAL(); // 退出临界区
vTaskDelay(10);
}
}
// task2函数实现
void task2(void *pvParameters)
{
uint32_t task2_num = 0;
while(1)
{
taskENTER_CRITICAL(); // 进入临界区
printf("任务2运行次数:%d\r\n",++task2_num);
taskEXIT_CRITICAL(); // 退出临界区
vTaskDelay(10);
}
}
2.3 主函数
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "mpu.h"
#include "lcd.h"
#include "key.h"
#include "malloc.h"
#include "freertos_demo.h"
int main(void)
{
sys_cache_enable(); /* 打开L1-Cache */
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(240, 2, 2, 4); /* 设置时钟, 480Mhz */
delay_init(480); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
mpu_memory_protection(); /* 保护相关存储区域 */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
my_mem_init(SRAMIN); /* 初始化内部内存池(AXI) */
freertos_demo(); /* 运行FreeRTOS例程 */
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号