
第14章 PWR介绍及应用
第十四章 PWR介绍及应用
1. 电源管理(PWR)简介
电源控制部分(PWR) 概述了不同电源域的电源架构以及电源配置控制器。 PWR 的内容比较多,我们把它们的主要特性概括为以下 3 点:
电源系统: USB 稳压器、内核域(VCORE)、 VDD 域、备份域、模拟域(VDDA)。
电源监控: POR/PDR 监控器、 BOR 监控器、 PVD 监控器、 AVD 监控器、 VBAT 阈值、温度阈值。
电源管理: VBAT 电池充电、工作模式、电压调节控制、低功耗模式。
1.1 电源系统
为了方便对电源系统进行管理,设计者把 STM32 的内核和外设等器件根据功能划分了不同的电源区域
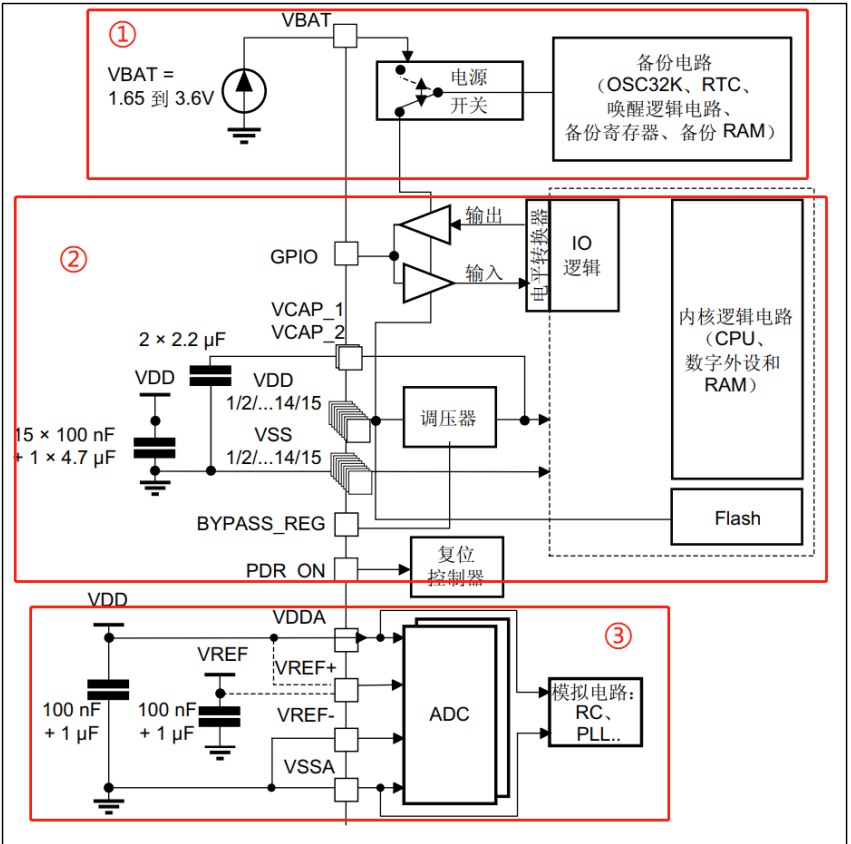
在电源概述框图中我们划分了 3 个区域①②③,分别是独立的 A/D 转换器供电和参考电压、电压调节器、电池备份区域。下面分别进行简单介绍:
① 电池备份区域(后备供电区域)
电池备份区域也就是后备供电区域,使用电池或者其他电源连接到 VBAT脚上,当 VDD断电时,可以保存备份寄存器的内容和维持 RTC 的功能。同时 VBAT 引脚也为 RTC、 SRAM 和 LSE振荡器供电,这保证了当主要电源被切断时, RTC 能够继续工作。切换到 VBAT供电由复位模块中的掉电复位功能控制。
② 电压调节器(VDD /1.2V 供电区域)
嵌入式线性调压器为备份域和待机电路以外的所有数字电路供电。调压器输出电压约为1.2 V。此调压器需要将两个外部电容连接到专用引脚 VCAP_1 和 VCAP_2,所有封装都配有这两个引脚。为激活或停用调压器,必须将特定引脚连接到 VSS 或 VDD。具体引脚与封装有关。通过软件激活时,调压器在复位后始终处于使能状态。
根据应用模式的不同,可采用三种不同的模式工作。 在运转模式下,调节器以正常工号模式为内核、内存和外设提供 1.2V;在停止模式下,调节器以低功耗模式提供 1.2V 电源,以保存寄存器和 SRAM 的内容。在待机模式下,调节器停止供电,除了备用电路和备份域外,寄存器和 SRAM 的内容全部丢失。
③ 独立的 A/D 转换器供电和参考电压(VDDA 供电区域)
为了提高转换精度, ADC 配有独立电源,可以单独滤波并屏蔽 PCB 上的噪声。 ADC 电源电压从单独的 VDDA 引脚接入, VSSA 提供了独立的电源接地连接。为了确保测量低电压时具有更高的精度,用户可以再 VREF 上连接到单独的 ADC 外部参考电压输入, VREF 电压介于1.8V 到 VDDA 之间。
1.2 电源管理
电源管理的部分我们要关注低功耗模式,在 STM32 的正常工作中,具有四种工作模式,运行、睡眠、停止以及待机。在上电复位后, STM32 处于运行状态时,当内核不需要继续运行,就可以选择进入后面的三种模式降低功耗。这三种低功耗模式电源消耗不同、唤醒时间不同和唤醒源不同,我们要根据自身的需要选择合适的低功耗模式。
| 特性 | 睡眠模式(Sleep) | 停机模式(Stop) | 待机模式(Standby) |
|---|---|---|---|
| 内核状态 | 停止 | 停止 | 停止(完全关闭) |
| RAM 保持 | 是 | 是 | 否(除非备份域供电) |
| 寄存器保持 | 是 | 是 | 否 |
| 功耗 | 中等 | 低(μA级) | 极低(nA级) |
| 唤醒时间 | 极快(几周期) | 快(μs级) | 慢(需系统重启) |
| 唤醒后运行状态 | 继续执行 | 继续执行 | 重新启动(复位) |
| 唤醒源 | 任意中断/事件 | EXTI、RTC、WKUP等 | WKUP引脚、RTC闹钟、复位 |
2. PWR基础使用示例
2.1 PVD电压监控
开发板供电正常的话, LCD 屏会显示"PVD Voltage OK!"。当供电电压过低,则会通过 PVD中断服务函数将 LED1 点亮;当供电电压正常,会在 PVD 中断服务函数将 LED1 熄灭。 LED0闪烁,提示程序运行。
2.1.1 PVD初始化
void pwr_pvd_init(uint32_t pls)
{
PWR_PVDTypeDef pvd_handle = {0};
__HAL_RCC_PWR_CLK_ENABLE();
pvd_handle.PVDLevel = pls; // 设置PVD电压监视器等级
HAL_PWR_ConfigPVD(&pvd_handle); // 配置PVD
HAL_NVIC_SetPriority(PVD_IRQn,3,3);
HAL_NVIC_EnableIRQ(PVD_IRQn); // 使能PVD中断
HAL_PWR_EnablePVD();
}
2.1.2 PVD中断函数
void PVD_IRQHandler(void)
{
HAL_PWR_PVD_IRQHandler();
}
void HAL_PWR_PVDCallback(void)
{
if(__HAL_PWR_GET_FLAG(PWR_FLAG_PVDO)) // 电压比PLS所选电压更低,触发中断
{
LCD_ShowString(30,130,200,16,16,"PVD Low Voltage Detected!");
LED_ON(LED1_GPIO_Pin);
}
else
{
LCD_ShowString(30,130,200,16,16,"PVD Normal Voltage!");
LED_OFF(LED1_GPIO_Pin);
}
}
2.1.3 主函数测试
#include "bsp_init.h"
#include "stdio.h"
#include "pvd.h"
int main(void)
{
uint8_t i = 0;
bsp_init();
LCD_ShowString(30,50,200,16,16,"PVD Test");
pwr_pvd_init(PWR_PVDLEVEL_7); // PVD 2.9V检
while(1)
{
if((i%20) == 0)
{
LED_TOGGLE(LED0_GPIO_Pin);
}
delay_ms(10);
i++;
}
}
2.2 睡眠模式测试
2.2.1 唤醒按键初始化
// 低功耗模式下按键初始化,用于唤醒
void pwr_wkup_key_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
WKUP_GPIO_CLK_ENABLE();
GPIO_InitStructure.Pin = WKUP_GPIO_Pin;
GPIO_InitStructure.Mode = GPIO_MODE_IT_RISING; // 上升沿触发
GPIO_InitStructure.Pull = GPIO_PULLDOWN; // 下拉
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(WKUP_GPIO_Port, &GPIO_InitStructure);
HAL_NVIC_SetPriority(EXTI0_IRQn, 2, 2);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
}
2.2.2 中断函数
void EXTI0_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(WKUP_GPIO_Pin);
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == WKUP_GPIO_Pin)
{
printf("WKUP Key pressed\r\n");
}
/* HAL_GPIO_EXTI_IRQHandler()函数已经为我们清除了中断标志位,所以我们进了回调函数可以不做任何事 */
}
2.2.3 进入睡眠模式
// 进入睡眠模式
void pwr_enter_sleep(void)
{
HAL_SuspendTick(); // 关闭Tick中断
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI); // 进入低功耗模式
}
2.2.4 主函数测试
#include "bsp_init.h"
#include "stdio.h"
#include "pwr.h"
int main(void)
{
uint8_t i = 0;
uint8_t key;
bsp_init();
pwr_wkup_key_init();
LCD_ShowString(30,50,200,16,16,"PWR Sleep Test");
while(1)
{
key = key_scan(0);
if(key == KEY0_Press) // 按下KEY0进入睡眠模式,按下WKUP键唤醒
{
LED_ON(LED1_GPIO_Pin);
printf("Enter Sleep Mode\r\n");
delay_ms(1000);
pwr_enter_sleep(); // 进入睡眠模式
HAL_ResumeTick();
LED_OFF(LED1_GPIO_Pin);
}
if((i%20) == 0)
{
LED_TOGGLE(LED0_GPIO_Pin);
}
delay_ms(10);
i++;
}
}
2.3 停止模式测试
2.3.1 进入停止模式
// 进入停止模式
void pwr_enter_stop(void)
{
__HAL_RCC_PWR_CLK_ENABLE();
HAL_SuspendTick(); // 关闭Tick中断
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
}
2.3.2 主函数测试
#include "bsp_init.h"
#include "stdio.h"
#include "pwr.h"
int main(void)
{
uint8_t i = 0;
uint8_t key;
bsp_init();
pwr_wkup_key_init();
LCD_ShowString(30,50,200,16,16,"PWR Stop Test");
while(1)
{
key = key_scan(0);
if(key == KEY0_Press) // 按下KEY0进入停止模式,按下WKUP键唤醒
{
LED_ON(LED1_GPIO_Pin);
printf("Enter Stop Mode\r\n");
delay_ms(1000);
pwr_enter_stop(); // 进入停止模式
/*从停止模式唤醒,需要重新配置时钟*/
sys_stm32_clock_init(336,8,2,7);
HAL_ResumeTick();
LED_OFF(LED1_GPIO_Pin);
}
if((i%20) == 0)
{
LED_TOGGLE(LED0_GPIO_Pin);
}
delay_ms(10);
i++;
}
}
2.4 待机模式测试
2.4.1 进入待机模式
// 进入待机模式
void pwr_enter_standby(void)
{
__HAL_RCC_AHB1_FORCE_RESET(); // 强制复位所有AHB1总线
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_RCC_BACKUPRESET_FORCE();
HAL_PWR_EnableBkUpAccess();
/* STM32F4,当开启了RTC相关中断后,必须先关闭RTC中断,再清中断标志位,然后重新设置 */
/* RTC中断,再进入待机模式才可以正常唤醒,否则会有问题. */
__HAL_PWR_CLEAR_FLAG(PWR_FLAG_SB);
// __HAL_RTC_WRITEPROTECTION_DISABLE(&g_rtc_handle); /* 关闭RTC写保护 */
/* 关闭RTC相关中断,可能在RTC实验打开了 */
// __HAL_RTC_WAKEUPTIMER_DISABLE_IT(&g_rtc_handle, RTC_IT_WUT);
// __HAL_RTC_TIMESTAMP_DISABLE_IT(&g_rtc_handle, RTC_IT_TS);
// __HAL_RTC_ALARM_DISABLE_IT(&g_rtc_handle, RTC_IT_ALRA|RTC_IT_ALRB);
/* 清除RTC相关中断标志位 */
// __HAL_RTC_ALARM_CLEAR_FLAG(&g_rtc_handle, RTC_FLAG_ALRAF|RTC_FLAG_ALRBF);
// __HAL_RTC_TIMESTAMP_CLEAR_FLAG(&g_rtc_handle, RTC_FLAG_TSF);
// __HAL_RTC_WAKEUPTIMER_CLEAR_FLAG(&g_rtc_handle, RTC_FLAG_WUTF);
__HAL_RCC_BACKUPRESET_RELEASE(); /* 备份区域复位结束 */
// __HAL_RTC_WRITEPROTECTION_ENABLE(&g_rtc_handle); /* 使能RTC写保护 */
__HAL_PWR_CLEAR_FLAG(PWR_FLAG_WU); /* 清除Wake_UP标志 */
HAL_PWR_EnableWakeUpPin(PWR_WAKEUP_PIN1); /* 设置WKUP用于唤醒 */
HAL_PWR_EnterSTANDBYMode(); /* 进入待机模式 */
}
2.4.2 主函数测试
#include "bsp_init.h"
#include "stdio.h"
#include "pwr.h"
int main(void)
{
uint8_t i = 0;
uint8_t key;
bsp_init();
pwr_wkup_key_init();
LCD_ShowString(30,50,200,16,16,"PWR Standby Test");
while(1)
{
key = key_scan(0);
if(key == KEY0_Press) // 按下KEY0进入停止模式,按下WKUP键唤醒
{
LED_ON(LED1_GPIO_Pin);
printf("Enter Standby Mode\r\n");
delay_ms(1000);
pwr_enter_standby(); // 进入待机模式
/* 从待机模式唤醒相当于系统重启(复位), 因此不会执行到这里 */
}
if((i%20) == 0)
{
LED_TOGGLE(LED0_GPIO_Pin);
}
delay_ms(10);
i++;
}
}
3. PWR常见函数(HAL库)
3.1 PWR 初始化与配置
3.1.1 HAL_PWR_DeInit()
函数原型:
HAL_StatusTypeDef HAL_PWR_DeInit(void)
功能:
-
重置 PWR 寄存器到默认值
-
禁用 PVD、唤醒引脚等所有 PWR 功能
示例:
if (HAL_PWR_DeInit() != HAL_OK) {
Error_Handler();
}
3.2 低功耗模式控制
3.2.1 睡眠模式
函数原型:
void HAL_PWR_EnterSLEEPMode(uint32_t Regulator, uint8_t SLEEPEntry)
参数:
-
Regulator:-
PWR_MAINREGULATOR_ON: 主调节器开启 -
PWR_LOWPOWERREGULATOR_ON: 低功耗调节器开启
-
-
SLEEPEntry:-
PWR_SLEEPENTRY_WFI: 通过 WFI 指令进入 -
PWR_SLEEPENTRY_WFE: 通过 WFE 指令进入
-
功能:
- 进入睡眠模式(最低功耗模式)
示例:
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
3.2.2 停止模式
函数原型:
void HAL_PWR_EnterSTOPMode(uint32_t Regulator, uint8_t STOPEntry)
参数:
-
Regulator:-
PWR_MAINREGULATOR_ON: 主调节器开启 -
PWR_LOWPOWERREGULATOR_ON: 低功耗调节器开启
-
-
STOPEntry:-
PWR_STOPENTRY_WFI: 通过 WFI 指令进入 -
PWR_STOPENTRY_WFE: 通过 WFE 指令进入
-
功能:
-
进入停止模式(深度睡眠模式)
-
唤醒后需要重新配置时钟系统
示例:
// 进入停止模式
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
// 唤醒后重新配置时钟
SystemClock_Config();
3.2.3 待机模式
函数原型:
void HAL_PWR_EnterSTANDBYMode(void)
功能:
-
进入待机模式(最低功耗模式)
-
唤醒后相当于系统复位
示例:
// 配置唤醒源
HAL_PWR_EnableWakeUpPin(PWR_WAKEUP_PIN1);
// 进入待机模式
HAL_PWR_EnterSTANDBYMode();
3.3 可编程电压检测器 (PVD)
3.3.1 HAL_PWR_ConfigPVD()
函数原型:
HAL_StatusTypeDef HAL_PWR_ConfigPVD(PWR_PVDTypeDef *sConfigPVD)
参数结构体:
typedef struct {
uint32_t PVDLevel; // PVD 检测阈值
uint32_t Mode; // PVD 模式
} PWR_PVDTypeDef;
阈值选项:
PWR_PVDLEVEL_0 // 2.0V
PWR_PVDLEVEL_1 // 2.2V
PWR_PVDLEVEL_2 // 2.4V
PWR_PVDLEVEL_3 // 2.5V
PWR_PVDLEVEL_4 // 2.6V
PWR_PVDLEVEL_5 // 2.8V
PWR_PVDLEVEL_6 // 2.9V
PWR_PVDLEVEL_7 // 3.0V
模式选项:
PWR_PVD_MODE_NORMAL // 正常模式
PWR_PVD_MODE_IT_RISING // 上升沿中断
PWR_PVD_MODE_IT_FALLING // 下降沿中断
PWR_PVD_MODE_IT_RISING_FALLING // 双边沿中断
PWR_PVD_MODE_EVENT_RISING // 上升沿事件
PWR_PVD_MODE_EVENT_FALLING // 下降沿事件
PWR_PVD_MODE_EVENT_RISING_FALLING // 双边沿事件
示例配置:
PWR_PVDTypeDef sConfigPVD;
sConfigPVD.PVDLevel = PWR_PVDLEVEL_6; // 2.9V
sConfigPVD.Mode = PWR_PVD_MODE_IT_FALLING; // 电压低于阈值时触发中断
HAL_PWR_ConfigPVD(&sConfigPVD);
HAL_PWR_EnablePVD();
3.3.2 PVD 控制函数
// 使能 PVD
void HAL_PWR_EnablePVD(void);
// 禁用 PVD
void HAL_PWR_DisablePVD(void);
3.3.3 PVD 中断回调
// 用户需重写此函数
void HAL_PWR_PVDCallback(void)
{
// 处理 PVD 事件
if (__HAL_PWR_GET_FLAG(PWR_FLAG_PVDO)) {
// 电压低于阈值
HandleLowVoltage();
}
}
3.4 唤醒控制
3.4.1 唤醒引脚控制
// 使能唤醒引脚
void HAL_PWR_EnableWakeUpPin(uint32_t WakeUpPinx);
// 禁用唤醒引脚
void HAL_PWR_DisableWakeUpPin(uint32_t WakeUpPinx);
引脚选项:
PWR_WAKEUP_PIN1 // PA0
PWR_WAKEUP_PIN2 // PC13
PWR_WAKEUP_PIN3 // PE6 // 仅适用于特定封装
PWR_WAKEUP_PIN4 // PA2 // 仅适用于特定封装
PWR_WAKEUP_PIN5 // PC5 // 仅适用于特定封装
示例:
// 使能 PA0 作为唤醒引脚
HAL_PWR_EnableWakeUpPin(PWR_WAKEUP_PIN1);
3.4.2 清除唤醒标志
void HAL_PWR_ClearFlag(uint32_t Flag);
标志选项:
PWR_FLAG_WU // 唤醒标志
PWR_FLAG_SB // 待机标志
PWR_FLAG_PVDO // PVD 输出标志
PWR_FLAG_VOS // 电压调节器就绪标志
3.5 备份域控制
3.5.1 备份域访问控制
// 使能备份域访问
void HAL_PWR_EnableBkUpAccess(void);
// 禁用备份域访问
void HAL_PWR_DisableBkUpAccess(void);
重要:
-
访问备份寄存器或 RTC 前必须使能
-
需要先使能 PWR 时钟:
__HAL_RCC_PWR_CLK_ENABLE()
3.5.2 备份寄存器操作
// 写入备份寄存器
void HAL_PWR_EnableBkUpReg(void);
void HAL_RTCEx_BKUPWrite(RTC_HandleTypeDef *hrtc, uint32_t BackupRegister, uint32_t Data);
// 读取备份寄存器
uint32_t HAL_RTCEx_BKUPRead(RTC_HandleTypeDef *hrtc, uint32_t BackupRegister);
示例:
// 写入备份寄存器
HAL_PWR_EnableBkUpAccess();
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR0, 0x1234);
HAL_PWR_DisableBkUpAccess();
// 读取备份寄存器
HAL_PWR_EnableBkUpAccess();
uint32_t data = HAL_RTCEx_BKUPRead(&hrtc, RTC_BKP_DR0);
HAL_PWR_DisableBkUpAccess();
3.6 电压调节器控制
3.6.1 过驱动模式 (高性能)
// 使能过驱动模式
HAL_StatusTypeDef HAL_PWREx_EnableOverDrive(void);
// 禁用过驱动模式
HAL_StatusTypeDef HAL_PWREx_DisableOverDrive(void);
功能:
-
提高系统时钟频率上限(最高 168MHz)
-
增加功耗,提升性能
使用流程:
// 1. 使能过驱动
HAL_PWREx_EnableOverDrive();
// 2. 等待过驱动使能就绪
while (__HAL_PWR_GET_FLAG(PWR_FLAG_ODRDY) == RESET) {}
// 3. 配置高系统时钟
SystemClock_Config_OverDrive();
// 4. 禁用过驱动
// HAL_PWREx_DisableOverDrive();
3.6.2 主调节器输出电压
// 设置调节器输出电压
HAL_StatusTypeDef HAL_PWREx_ControlVoltageScaling(uint32_t VoltageScaling);
电压选项:
PWR_REGULATOR_VOLTAGE_SCALE1 // 高性能模式 (1.8V)
PWR_REGULATOR_VOLTAGE_SCALE2 // 平衡模式 (1.5V)
PWR_REGULATOR_VOLTAGE_SCALE3 // 低功耗模式 (1.2V)
3.7 FLASH 电源控制
3.7.1 FLASH 深度睡眠控制
// 使能 FLASH 深度睡眠
HAL_StatusTypeDef HAL_PWREx_EnableFlashPowerDown(void);
// 禁用 FLASH 深度睡眠
HAL_StatusTypeDef HAL_PWREx_DisableFlashPowerDown(void);
功能:
-
在停止模式下进一步降低功耗
-
唤醒后需要等待 FLASH 就绪
3.8 电源状态监控
3.8.1 获取电源标志
// 检查电源标志
FlagStatus HAL_PWR_GetFlag(uint32_t Flag);
// 清除电源标志
void HAL_PWR_ClearFlag(uint32_t Flag);
常用标志:
PWR_FLAG_WU // 唤醒标志
PWR_FLAG_SB // 待机标志
PWR_FLAG_PVDO // PVD输出标志
PWR_FLAG_BRR // 备份调节器就绪标志
PWR_FLAG_VOSRDY // 电压调节器就绪标志
3.8.2 电源状态检查
// 检查调节器是否就绪
if (__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY) {
// 调节器已就绪
}
// 检查PVD状态
if (__HAL_PWR_GET_FLAG(PWR_FLAG_PVDO)) {
// 电压低于阈值
}
| 模式 | 功耗 | 唤醒时间 | 数据保留 | 唤醒源 |
|---|---|---|---|---|
| 运行模式 | 最高 | 立即 | 全部 | N/A |
| 睡眠模式 | 中等 | 立即 | 全部 | 任意中断 |
| 停止模式 | 低 | 快速 | SRAM+寄存器 | 外部中断、RTC等 |
| 待机模式 | 最低 | 慢 | 备份寄存器 | WKUP引脚、RTC闹钟等 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号