
第5章 TIM介绍及基础使用
第五章 TIM介绍及基础使用
1. F28P550的CPU定时器
F28P550的CPU定时器有3个,Timer0、Timer1和Timer2。 它们是完全一样的 32 位计时器,具有可预设定周期 和 16 位时钟预分频。此计时器具有 32 位递减计数寄存器,该寄存器在计数器达到 0 时生成一中断。
计数器以 CPU 时钟速度 除以 预分频值设置 形式递减。当计数器达到 0 时,则自动重新加载 32 位周期值。
CPU 计时器 0 用于普通用途并连接至 PIE 块。
CPU 计时器 1 也用于普通用途,并连接至 CPU 的 INT13。
CPU 计时器 2 为 TI-RTOS 保留。该计时器连接至 CPU 的 INT14。如果未使用 TI-RTOS ,CPU 计时器 2 也可用于普通用途。
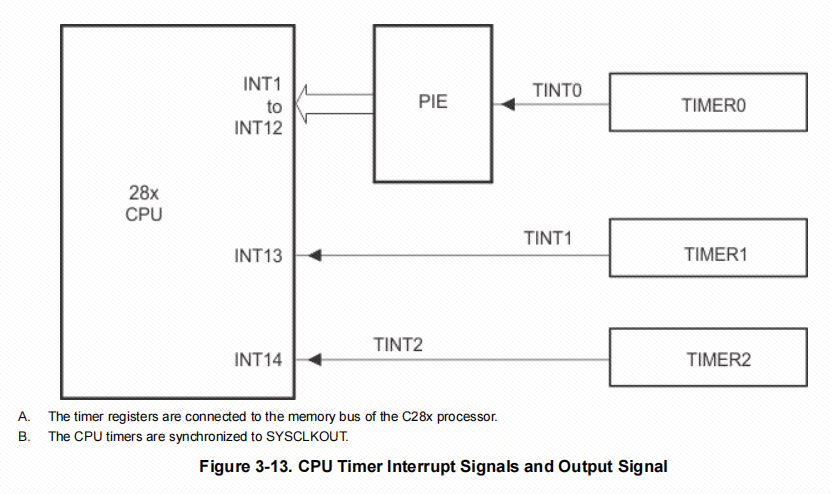
CPU 计时器 0 和 CPU 计时器 1 使用的是 SYSCLK 时钟,默认为150MHz。
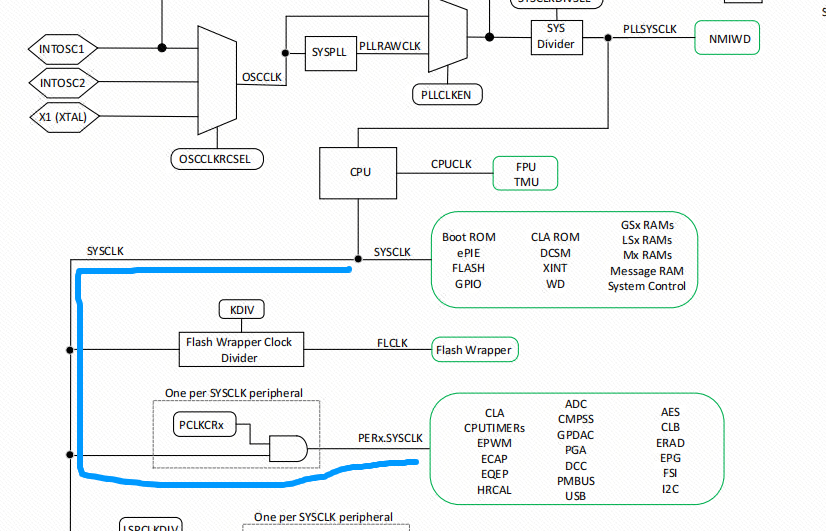
CPU 计时器 2 的时钟可由下列任一时钟来源:
- SYSCLK(默认)
- 内部振荡器 1(INTOSC1)
- 内部振荡器 2(INTOSC2)
- X1 (XTAL)
定时器时间换算
假设使用CPU 计时器 0,其使用的时钟源是 SYSCLK,它默认的频率 = 150MHz
period 为设置的定时器周期
Prescaler 为时钟预分频
则定时时间为:
定时时间 = (Period + 1) * (Prescaler + 1) / 定时器频率
2. TIM使用示例
2.1 CCS&syscfg配置
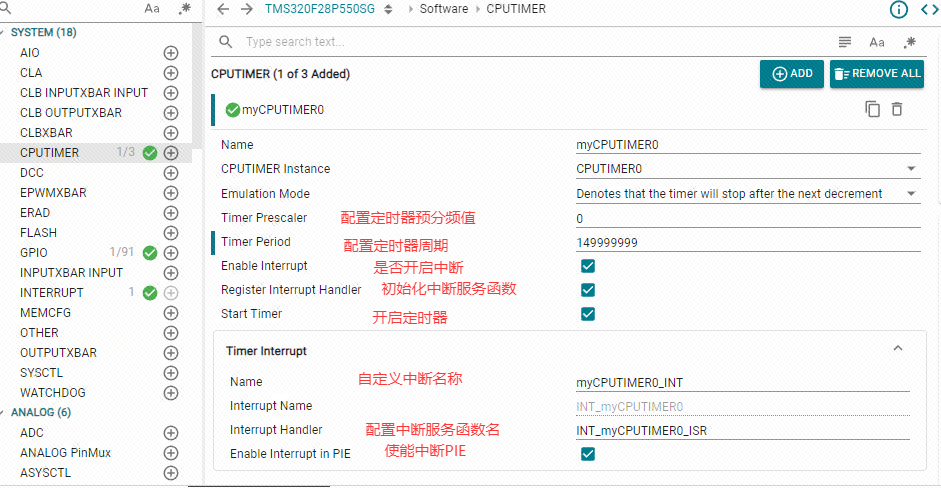
图中,我们配置了 预分频值Prescaler = 0,周期Period = 149,999,999,则定时时间为:
定时时间 = (Period + 1) * (Prescaler + 1) / 定时器频率 = (149,999,999 + 1) * 1 / 150,000,000 = 1 秒
因为计数器是一个向下计数的模式,则计数器从 149,999,999 减到 0 时,一共会花费 1 秒的时间。
每记一个数所花费的时间 = 1 / 预分频后的定时器频率 = 1 / 150,000,000 = 6.6667 纳秒。
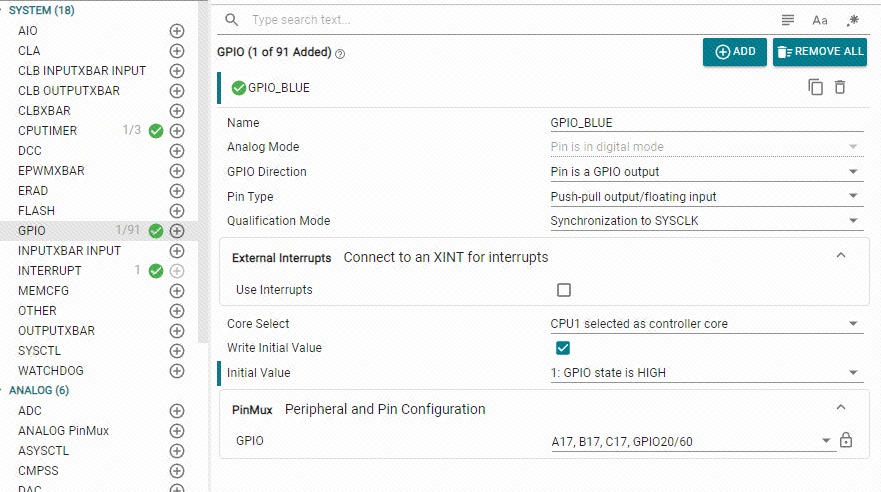
因为案例中用到了蓝色LED灯用来展示状态,所以还需要配置LED灯的引脚为输出模式。
2.2 用户代码
//#############################################################################
//
// FILE: empty_driverlib_main.c
//
//! \addtogroup driver_example_list
//! <h1>Empty Project Example</h1>
//!
//! This example is an empty project setup for Driverlib development.
//!
//
//#############################################################################
//
//
//
// C2000Ware v5.05.00.00
//
// Copyright (C) 2024 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Disable pin locks and enable internal pull-ups.
//
Device_initGPIO();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// PinMux and Peripheral Initialization
//
Board_init();
//
// C2000Ware Library initialization
//
C2000Ware_libraries_init();
//
// Enable Global Interrupt (INTM) and real time interrupt (DBGM)
//
EINT;
ERTM;
while(1)
{
}
}
__interrupt void INT_User_TIM0_ISR(void)
{
GPIO_togglePin(User_LED);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP1);
}
//
// End of File
//
3. 相关函数介绍
//*****************************************************************************
//
//! 停止CPU定时器。
//!
//! \param base 是定时器模块的基地址。
//!
//! 该函数用于停止CPU定时器。
//!
//! \return 无。
//
//*****************************************************************************
static inline void CPUTimer_stopTimer(uint32_t base);
//*****************************************************************************
//
//! 启动(或重新启动)CPU定时器。
//!
//! \param base 定时器模块的基地址。
//!
//! 该函数用于启动(或重新启动)CPU定时器。
//!
//! 注意:此函数会重载定时器计数器。
//!
//! \return 无。
//
//*****************************************************************************
static inline void CPUTimer_startTimer(uint32_t base);
/*****************************************************************************
//
//! 启动(或恢复)CPU定时器。
//!
//! \param base 定时器模块的基地址。
//!
//! 该函数用于启动或恢复CPU定时器的运行。
//!
//! 注意:此函数不会重置定时器计数器。
//!
//! \return 无。
//
//*****************************************************************************/
static inline void CPUTimer_resumeTimer(uint32_t base);
//*****************************************************************************
//
//! 重载定时器计数器。
//!
//! \param base 定时器模块的基地址。
//!
//! 该函数将CPU定时器周期寄存器中的值重新加载到定时器计数器。
//!
//! \return 无。
//
//*****************************************************************************/
static inline void CPUTimer_reloadTimerCounter(uint32_t base);
//*****************************************************************************
//
//! 获取当前定时器计数值。
//!
//! \param base 定时器模块的基地址。
//!
//! 该函数返回当前CPU定时器计数器的数值。
//!
//! \return 返回当前定时器计数值。
//
//*****************************************************************************/
static inline uint32_t CPUTimer_getTimerCount(uint32_t base);
//*****************************************************************************
//
//! 获取定时器溢出状态。
//!
//! \param base 定时器模块的基地址。
//!
//! 该函数返回CPU定时器的溢出状态。
//!
//! \return 若定时器已溢出返回true,否则返回false。
//
//*****************************************************************************/
static inline bool CPUTimer_getTimerOverflowStatus(uint32_t base);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号