
第17章 PWR介绍及应用
第十七章 PWR介绍及应用
1. 可编程电压检测器PVD
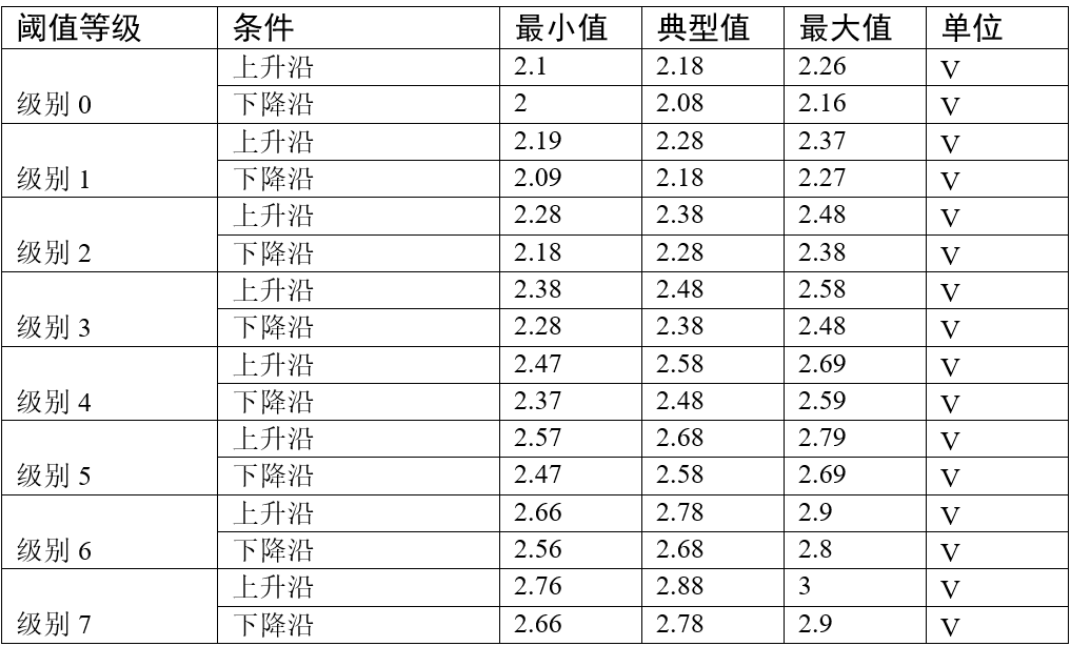
STM32提供了可编程电压检测器 PVD,它也是实时检测 VDD 的电压,当检测到电压低于编程的 VPVD 阈值时,会向内核产生一个 PVD 中断 (EXTI16 线中断) 以使内核在复位前进行紧急处理。该电压阈值可通过电源控制寄存器 PWR_CSR 设置。
2. STM32 的功耗模式
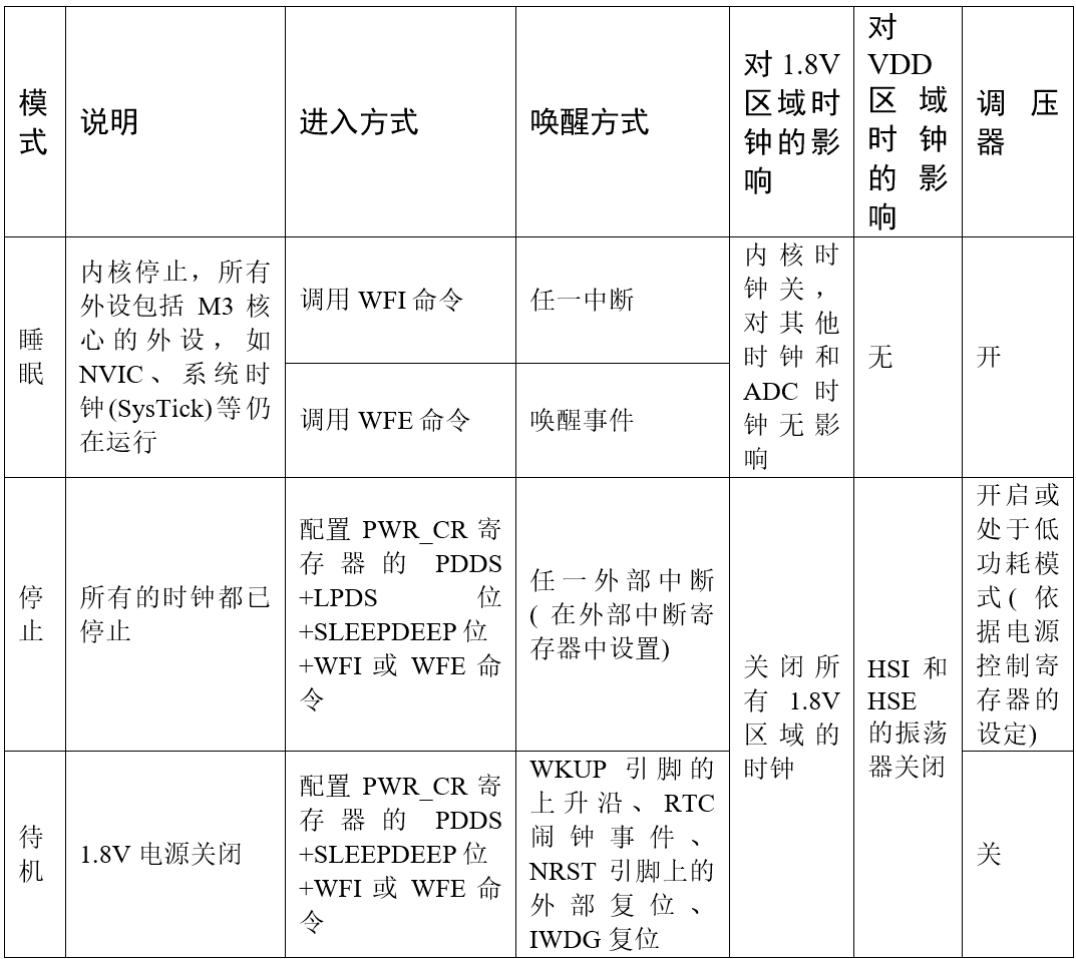
按功耗由高到低排列, STM32 具有运行、睡眠、停止和待机四种工作模式。上电复位后 STM32处于运行状态时,当内核不需要继续运行,就可以选择进入后面的三种低功耗模式降低功耗,这三种模式中,电源消耗不同、唤醒时间不同、唤醒源不同,用户需要根据应用需求,选择最佳的低功耗模式。
3. PWR使用示例
3.1 睡眠模式
3.1.1 外部中断配置
#include "key.h"
void BSP_KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置PA0为浮空输入(外部已有上拉电阻)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0);
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x0F;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x0F;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
3.1.2 睡眠模式测试
#include "stm32f10x.h"
#include "systick.h"
#include "led.h"
#include "key.h"
#include "usart.h"
#include <stdio.h>
volatile uint8_t key_wakeup_flag = 0; // 按键唤醒标志
int main(void)
{
BSP_LED_Init();
BSP_KEY_Init();
SysTick_Init();
USARTx_Init(115200);
printf("System Started.\r\n");
printf("Press KEY to enter sleep mode...\r\n");
// 初始状态:不进入睡眠
uint8_t sleep_enabled = 0;
while(1)
{
if(key_wakeup_flag)
{
key_wakeup_flag = 0;
if(!sleep_enabled)
{
// 第一次按键:准备进入睡眠
LED_ON(GREEN_LED_Pin);
printf("Preparing to sleep. Press KEY again to wake up.\r\n");
Delay_ms(1000);
LED_OFF(GREEN_LED_Pin);
sleep_enabled = 1; // 允许进入睡眠
}
else
{
// 唤醒后操作
LED_ON(GREEN_LED_Pin);
printf("Waked up by KEY!\r\n");
printf("Press KEY to enter sleep mode...\r\n");
Delay_ms(1000);
LED_OFF(GREEN_LED_Pin);
sleep_enabled = 0; // 禁止再次立即进入睡眠
}
}
if(sleep_enabled)
{
// 进入睡眠模式
printf("Entering sleep mode...\r\n");
// 确保串口发送完成
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
// 清除唤醒标志
PWR->CR |= PWR_CR_CWUF;
// 进入睡眠模式
__WFI();
// 唤醒后继续执行
printf("Woke up from sleep!\r\n");
sleep_enabled = 0;
}
}
}
void EXTI0_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line0) != RESET)
{
EXTI_ClearITPendingBit(EXTI_Line0);
key_wakeup_flag = 1;
}
}
3.2 停止模式
3.2.1 外部中断配置
#include "key.h"
#include "led.h"
void Key_NVIC_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = KEY1_EXTI_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = KEY2_EXTI_IRQn;
NVIC_Init(&NVIC_InitStructure);
}
void Key_GPIOandEXTI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
RCC_APB2PeriphClockCmd(KEY1_GPIO_CLK, ENABLE);
/* KEY1 引脚配置 */
GPIO_InitStructure.GPIO_Pin = KEY1_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY1_GPIO_PORT, &GPIO_InitStructure);
GPIO_EXTILineConfig(KEY1_EXTI_PORTSOURCE, KEY1_EXTI_PINSOURCE);
EXTI_InitStructure.EXTI_Line = KEY1_EXTI_LINE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
/* KEY2 引脚配置 */
GPIO_InitStructure.GPIO_Pin = KEY2_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY2_GPIO_PORT, &GPIO_InitStructure);
GPIO_EXTILineConfig(KEY2_EXTI_PORTSOURCE, KEY2_EXTI_PINSOURCE);
EXTI_InitStructure.EXTI_Line = KEY2_EXTI_LINE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}
void KEY_EXTI_Init(void)
{
Key_NVIC_Init();
Key_GPIOandEXTI_Init();
}
void KEY1_IRQHandler(void)
{
if(EXTI_GetITStatus(KEY1_EXTI_LINE) != RESET)
{
LED_ON(BLUE_LED_Pin);
EXTI_ClearITPendingBit(KEY1_EXTI_LINE);
}
}
void KEY2_IRQHandler(void)
{
if(EXTI_GetITStatus(KEY2_EXTI_LINE) != RESET)
{
LED_ON(RED_LED_Pin);
EXTI_ClearITPendingBit(KEY2_EXTI_LINE);
}
}
3.2.2 重配时钟树
// 停止模式唤醒后使用HSI时钟,我们需要切换至HSE
void STOP_SYSConfig(void)
{
RCC_HSEConfig(RCC_HSE_ON);
while(RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
RCC_PLLCmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
while(RCC_GetSYSCLKSource() != 0x08); // 系统时钟源切换到PLL
}
3.2.3 主函数测试
int main(void)
{
RCC_ClocksTypeDef clock_status_wakeup;
RCC_ClocksTypeDef clock_status_config;
uint8_t clock_source_wakeup;
uint8_t clock_source_config;
BSP_LED_Init();
KEY_EXTI_Init();
SysTick_Init();
USARTx_Init(115200);
while(1)
{
printf("绿灯亮,系统正常工作中...\r\n");
LED_ON(GREEN_LED_Pin);
Delay_ms(500);
LED_OFF(GREEN_LED_Pin);
Delay_ms(500);
printf("准备进入停止模式...\r\n");
// 确保所有串口数据已发送
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFI);
// 1. 获取唤醒时的时钟状态 (使用正确的结构体)
clock_source_wakeup = RCC_GetSYSCLKSource();
RCC_GetClocksFreq(&clock_status_wakeup);
// 2. 重新配置系统时钟
STOP_SYSConfig();
// 3. 重新初始化关键外设
SysTick_Init(); // 系统时钟改变后需重配SysTick
USARTx_Init(115200); // 必须重新初始化USART
// 4. 获取重新配置后的时钟状态
clock_source_config = RCC_GetSYSCLKSource();
RCC_GetClocksFreq(&clock_status_config);
// 5. 打印时钟状态
printf("\r\n--- 唤醒后时钟状态 ---\r\n");
printf("时钟源: %s\r\n", (clock_source_wakeup == 0) ? "HSI" : "PLL");
printf("SYSCLK: %d Hz\r\n", clock_status_wakeup.SYSCLK_Frequency);
printf("HCLK : %d Hz\r\n", clock_status_wakeup.HCLK_Frequency);
printf("PCLK1 : %d Hz\r\n", clock_status_wakeup.PCLK1_Frequency);
printf("PCLK2 : %d Hz\r\n", clock_status_wakeup.PCLK2_Frequency);
printf("\r\n--- 重配后时钟状态 ---\r\n");
printf("时钟源: %s\r\n", (clock_source_config == 8) ? "PLL" : "HSI");
printf("SYSCLK: %d Hz\r\n", clock_status_config.SYSCLK_Frequency);
printf("HCLK : %d Hz\r\n", clock_status_config.HCLK_Frequency);
printf("PCLK1 : %d Hz\r\n", clock_status_config.PCLK1_Frequency);
printf("PCLK2 : %d Hz\r\n", clock_status_config.PCLK2_Frequency);
printf("\r\n测试完成,等待下一次循环...\r\n\r\n");
Delay_ms(2000);
}
}
3.3 待机模式
3.3.1 KEY2长按
// KEY2长按
uint8_t KEY2_LongPress(void)
{
uint8_t CNT_Down = 0;
uint8_t CNT_Up = 0;
while(1)
{
if(GPIO_ReadInputDataBit(KEY2_GPIO_PORT, KEY2_GPIO_PIN) == SET)
{
CNT_Down++;
CNT_Up = 0;
if(CNT_Down >= 100)
{
return 1;
}
}
else
{
CNT_Up++;
if(CNT_Up >= 5)
{
return 0;
}
}
}
}
3.3.2 主函数测试
#include "stm32f10x.h"
#include "systick.h"
#include "led.h"
#include "key.h"
#include "usart.h"
#include <stdio.h>
int main(void)
{
BSP_LED_Init();
KEY_GPIO_Init();
SysTick_Init();
USARTx_Init(115200);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
if(PWR_GetFlagStatus(PWR_FLAG_WU) == SET)
{
LED_ON(BLUE_LED_Pin); // 待机模式唤醒
printf("待机模式唤醒复位\r\n");
}
else
{
LED_ON(GREEN_LED_Pin);
printf("正常启动\r\n");
}
while(1)
{
if(KEY2_LongPress())
{
printf("长按KEY2进入待机模式,按KEY1唤醒\r\n");
LED_ON(RED_LED_Pin);
Delay_ms(1000);
PWR_ClearFlag(PWR_FLAG_WU);
PWR_WakeUpPinCmd(ENABLE);
PWR_EnterSTANDBYMode();
}
}
}
3.4 PVD电源监控
使用 PVD 监控 STM32 芯片的 VDD 引脚,当监测到供电电压低于阈值时会产生 PVD 中断,系统进入中断服务函数进入紧急处理过程。
#include "stm32f10x.h"
#include "systick.h"
#include "led.h"
#include "key.h"
#include "usart.h"
#include <stdio.h>
void PVD_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = PVD_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
EXTI_ClearITPendingBit(EXTI_Line16);
EXTI_InitStructure.EXTI_Line = EXTI_Line16;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
PWR_PVDLevelConfig(PWR_PVDLevel_2V6); // VDD电压低于2.6V时触发中断
PWR_PVDCmd(ENABLE);
}
void PVD_IRQHandler(void)
{
if(PWR_GetFlagStatus(PWR_FLAG_PVDO) == SET)
{
LED_ON(RED_LED_Pin);
}
EXTI_ClearITPendingBit(EXTI_Line16);
}
int main(void)
{
PVD_Config();
BSP_LED_Init();
SysTick_Init();
while(1);
}
我们实测 PVD 阈值等级为“PWR_PVDLevel_2V6”时,当可调电源电压降至 4.1V 时,板子亮红灯,此时的“3.3V”电源引脚的实测电压为 2.55V
4. 电源管理常见函数(STD库)
4.1 核心配置函数
// 进入睡眠模式
void PWR_EnterSleepMode(FunctionalState SleepOnExit);
// 进入停止模式
void PWR_EnterSTOPMode(uint32_t PWR_Regulator, uint8_t PWR_STOPEntry);
// 进入待机模式
void PWR_EnterSTANDBYMode(void);
参数说明:
-
SleepOnExit:ENABLE表示退出中断后返回睡眠 -
PWR_Regulator:-
PWR_Regulator_ON:稳压器正常模式 -
PWR_Regulator_LowPower:稳压器低功耗模式
-
-
PWR_STOPEntry:-
PWR_STOPEntry_WFI:等待中断唤醒 -
PWR_STOPEntry_WFE:等待事件唤醒
-
4.2 模式切换完整流程
4.2.1 睡眠模式配置
void Enter_SleepMode(void) {
// 1. 配置唤醒源(如EXTI中断)
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStructure);
// 2. 进入睡眠
PWR_EnterSleepMode(ENABLE); // 退出中断后保持睡眠
// 唤醒后执行此处代码...
}
4.2.2 停止模式配置
void Enter_StopMode(void) {
// 1. 使能PWR时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
// 2. 配置唤醒源(如PA0唤醒引脚)
PWR_WakeUpPinCmd(PWR_WakeUpPin_1, ENABLE);
// 3. 进入停止模式(低功耗稳压器+WFI唤醒)
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFI);
// 4. 唤醒后恢复时钟(停止模式下时钟切换为HSI)
SystemInit(); // 重新初始化时钟
// 5. 重新配置外设
GPIO_Init(); // 重新初始化GPIO等
}
4.2.3 待机模式配置
void Enter_StandbyMode(void) {
// 1. 使能PWR时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
// 2. 清除唤醒标志
PWR_ClearFlag(PWR_FLAG_WU);
// 3. 配置RTC唤醒(可选)
RTC_SetWakeUpCounter(0xFFFF); // 设置唤醒间隔
// 4. 进入待机模式
PWR_EnterSTANDBYMode();
// 唤醒后系统复位,从main()重新开始执行
}
4.3 唤醒源配置
4.3.1 唤醒引脚配置
// 使能WKUP引脚(PA0)
PWR_WakeUpPinCmd(PWR_WakeUpPin_1, ENABLE);
// 配置引脚极性(上升沿唤醒)
PWR_WakeUpPinPolarityConfig(PWR_WakeUpPin_1, PWR_WakeUpPinPolarity_High);
4.3.2 RTC唤醒配置
// 使能RTC时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
// 配置RTC唤醒间隔(单位:RTC时钟周期)
RTC_WakeUpCmd(ENABLE);
RTC_SetWakeUpCounter(3276); // 约1秒(假设RTC=32.768kHz)
4.4 备份域操作
4.4.1 备份寄存器访问
// 使能备份访问
PWR_BackupAccessCmd(ENABLE);
// 写入备份寄存器
BKP_WriteBackupRegister(BKP_DR1, 0x1234);
// 读取备份寄存器
uint16_t data = BKP_ReadBackupRegister(BKP_DR1);
4.4.2 RTC配置
// 初始化RTC
RTC_InitTypeDef RTC_InitStruct;
RTC_InitStruct.RTC_HourFormat = RTC_HourFormat_24;
RTC_InitStruct.RTC_AsynchPrediv = 127; // 异步分频
RTC_InitStruct.RTC_SynchPrediv = 255; // 同步分频
RTC_Init(&RTC_InitStruct);
// 设置时间
RTC_TimeTypeDef TimeStruct;
TimeStruct.RTC_Hours = 12;
TimeStruct.RTC_Minutes = 30;
RTC_SetTime(RTC_Format_BIN, &TimeStruct);
4.5 电压监测配置
// 配置PVD阈值
PWR_PVDLevelConfig(PWR_PVDLevel_2V9); // 2.9V阈值
// 使能PVD中断
PWR_PVDCmd(ENABLE);
PWR_ITConfig(PWR_IT_PVD, ENABLE);
// 中断服务函数
void PVD_IRQHandler(void) {
if(PWR_GetFlagStatus(PWR_FLAG_PVDO)) {
// 电压低于阈值,执行紧急保存
PWR_ClearFlag(PWR_FLAG_PVDO);
}
}
| 模式 | 功耗 | 唤醒方式 | 保持状态 |
|---|---|---|---|
| 睡眠模式 | ~1.5mA | 任意中断/事件 | CPU暂停,外设保持 |
| 停止模式 | ~20μA | 外部中断/RTC/唤醒引脚 | SRAM/寄存器保持 |
| 待机模式 | ~2μA | 唤醒引脚/RTC/复位/NWK引脚 | 仅备份域保持(需VBAT供电) |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号