
第11章 SPI介绍及应用
第十一章 SPI介绍及应用
1. SPI简介
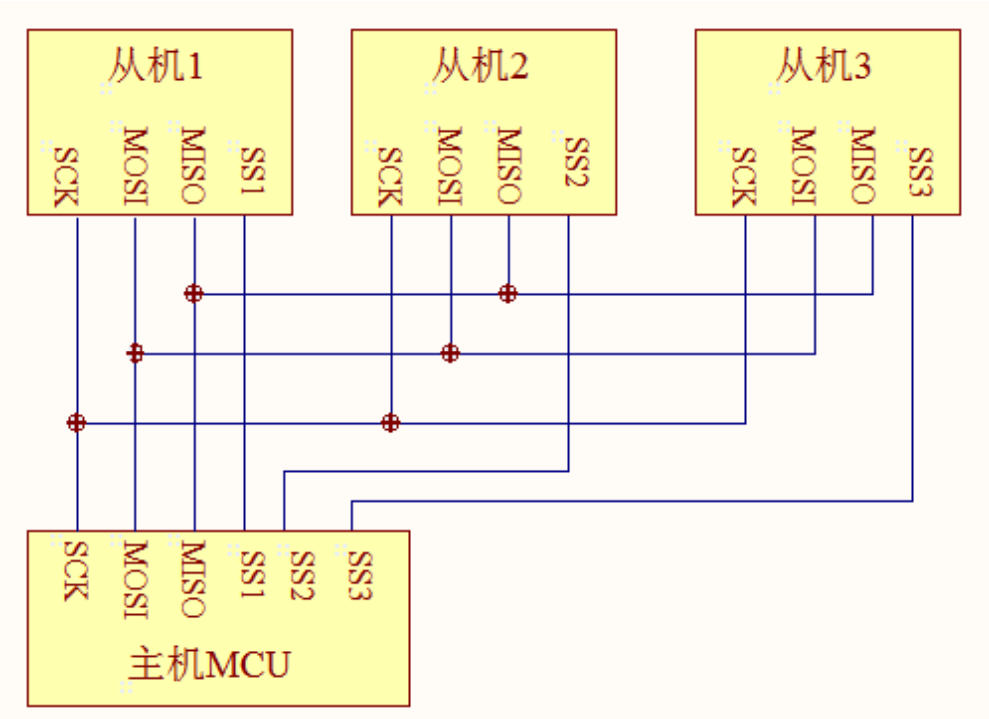
SPI 通讯使用 3 条总线及片选线, 3 条总线分别为 SCK、 MOSI、 MISO,片选线为 SS,它们的作用介绍如下:
-
SS ( Slave Select):从设备选择信号线,常称为片选信号线,也称为 NSS、 CS,以下用 NSS 表示。当有多个 SPI 从设备与 SPI 主机相连时,设备的其它信号线 SCK、 MOSI 及 MISO 同时并联到相同的 SPI 总线上,即无论有多少个从设备,都共同只使用这 3 条总线;而每个从设备都有独立的这一条 NSS 信号线,本信号线独占主机的一个引脚,即有多少个从设备,就有多少条片选信号线。 I2C 协议中通过设备地址来寻址、选中总线上的某个设备并与其进行通讯;而 SPI 协议中没有设备地址,它使用 NSS 信号线来寻址,当主机要选择从设备时,把该从设备的 NSS 信号线设置为低电平,该从设备即被选中,即片选有效,接着主机开始与被选中的从设备进行 SPI 通讯。所以 SPI 通讯以 NSS 线置低电平为开始信号,以 NSS 线被拉高作为结束信号。
-
SCK (Serial Clock):时钟信号线,用于通讯数据同步。它由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不一样,如 STM32 的 SPI 时钟频率最大为 fpclk/2,两个设备之间通讯时,通讯速率受限于低速设备。
-
MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。主机的数据从这条信号线输出,从机由这条信号线读入主机发送的数据,即这条线上数据的方向为主机到从机。
-
MISO (Master Input,, Slave Output):主设备输入/从设备输出引脚。主机从这条信号线读入数据,从机的数据由这条信号线输出到主机,即在这条线上数据的方向为从机到主机。
STM32 的 SPI 外设可用作通讯的主机及从机,支持最高的 SCK 时钟频率为 fpclk/2 (STM32F103 型号的芯片默认 fpclk1 为 36MHz, fpclk2 为 72MHz),完全支持 SPI 协议的 4 种模式,数据帧长度可设置为 8 位或 16 位,可设置数据 MSB 先行或 LSB 先行。它还支持双线全双工 (前面小节说明的都是这种模式)、双线单向以及单线模式。其中双线单向模式可以同时使用 MOSI 及 MISO 数据线向一个方向传输数据,可以加快一倍的传输速度。而单线模式则可以减少硬件接线,当然这样速率会受到影响。我们只讲解双线全双工模式。
2. SPI结构体
跟其它外设一样, STM32 标准库提供了 SPI 初始化结构体及初始化函数来配置 SPI 外设。初始化结构体及函数定义在库文件“stm32f10x_spi.h”及“stm32f10x_spi.c”中。
typedef struct
{
uint16_t SPI_Direction; // 设置 SPI 的单双向模式
uint16_t SPI_Mode; // 设置 SPI 的主/从机端模式
uint16_t SPI_DataSize; // 设置 SPI 的数据帧长度,可选 8/16 位
uint16_t SPI_CPOL; // 设置时钟极性 CPOL,可选高/低电平
uint16_t SPI_CPHA; // 设置时钟相位,可选奇/偶数边沿采样
uint16_t SPI_NSS; // 设置 NSS 引脚由 SPI 硬件控制还是软件控制
uint16_t SPI_BaudRatePrescaler; // 设置时钟分频因子, fpclk/分频数 =fSCK
uint16_t SPI_FirstBit; // 设置 MSB/LSB 先行
uint16_t SPI_CRCPolynomial; // 设置 CRC 校验的表达式
}SPI_InitTypeDef;
SPI_Direction:
- 功能:设置 SPI 的数据传输方向。
- 可能值:
SPI_DIRECTION_2LINES:双向数据传输(全双工模式)。SPI_DIRECTION_2LINES_RXONLY:只接收数据(半双工模式)。SPI_DIRECTION_1LINE:单向数据传输(单工模式)。
SPI_Mode:
- 功能:设置 SPI 的工作模式(主模式或从模式)。
- 可能值:
SPI_MODE_MASTER:SPI 工作在主模式。SPI_MODE_SLAVE:SPI 工作在从模式。
SPI_DataSize:
- 功能:设置 SPI 的数据帧长度,可以是 8 位或 16 位。
- 可能值:
SPI_DATASIZE_8BIT:8 位数据帧。SPI_DATASIZE_16BIT:16 位数据帧。
SPI_CPOL:
- 功能:设置 SPI 的时钟极性 (CPOL),定义时钟信号的空闲状态。
- 可能值:
SPI_CPOL_LOW:时钟空闲时为低电平。SPI_CPOL_HIGH:时钟空闲时为高电平。
SPI_CPHA:
- 功能:设置 SPI 的时钟相位 (CPHA),决定数据采样的时钟边沿。
- 可能值:
SPI_CPHA_1EDGE:数据在第一个时钟沿(上升沿或下降沿)采样。SPI_CPHA_2EDGE:数据在第二个时钟沿(与CPOL相关)采样。
SPI_NSS:
- 功能:设置 NSS(片选)引脚的控制方式。
- 可能值:
SPI_NSS_HARD:NSS 由 SPI 硬件控制。SPI_NSS_SOFT:NSS 由软件控制。
SPI_BaudRatePrescaler:
- 功能:设置 SPI 时钟的分频因子,决定 SPI 时钟的频率。计算公式为:
f_SCK = f_PCLK / Prescaler,即时钟源频率除以分频因子,得到 SPI 的时钟频率。 - 可能值:此值通常为 2、4、8、16、32、64、128 或 256。
SPI_FirstBit:
- 功能:设置 SPI 数据的传输顺序。
- 可能值:
SPI_FIRSTBIT_MSB:数据的最高位(MSB)先行。SPI_FIRSTBIT_LSB:数据的最低位(LSB)先行。
SPI_CRCPolynomial:
- 功能:设置 SPI CRC 校验的多项式,用于校验数据的正确性。此值设置了 CRC 校验的多项式表达式,只有在启用了 CRC 校验时才有效。
- 可能值:用户根据具体的 CRC 配置要求设置多项式。
3. SPI使用示例
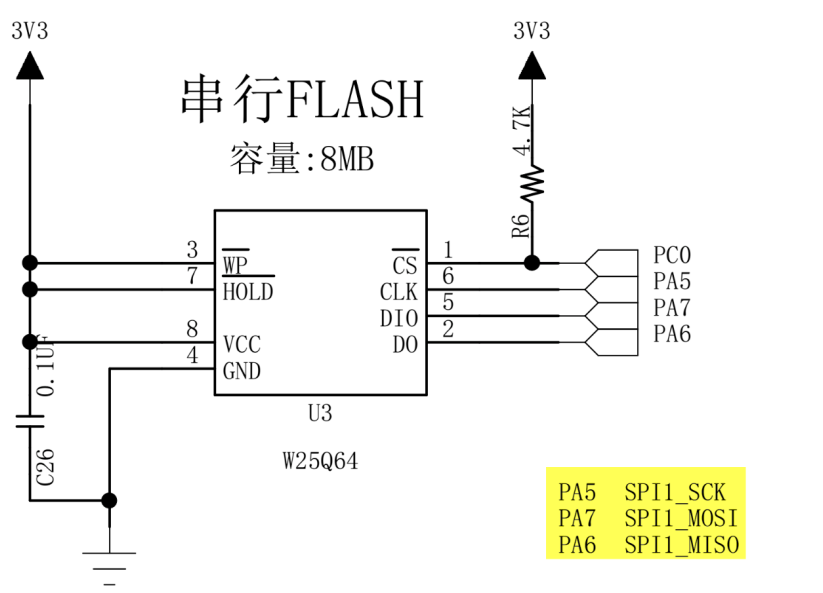
本实验板中的 FLASH 芯片 (型号: W25Q64) 是一种使用 SPI 通讯协议的 NOR FLASH 存储器,它的 CS/CLK/DIO/DO 引脚分别连接到了 STM32 对应的 SPI 引脚 NSS/SCK/MOSI/MISO 上,其中STM32 的 NSS 引脚是一个普通的 GPIO,不是 SPI 的专用 NSS 引脚,所以程序中我们要使用软件控制的方式。
FLASH 芯片中还有 WP 和 HOLD 引脚。 WP 引脚可控制写保护功能,当该引脚为低电平时,禁止写入数据。我们直接接电源,不使用写保护功能。 HOLD 引脚可用于暂停通讯,该引脚为低电平时,通讯暂停,数据输出引脚输出高阻抗状态,时钟和数据输入引脚无效。我们直接接电源,不使用通讯暂停功能。
3.1 spi_flash相关参数宏定义
#ifndef __SPI_FLASH_H__
#define __SPI_FLASH_H__
#include "stm32f10x.h"
#include "usart.h"
#include <stdio.h>
/* 超时时间配置 */
#define SPI_FLAG_TIMEOUT ((uint32_t)0x1000) // 单次操作超时计数
#define SPI_LONG_TIMEOUT ((uint32_t)(10 * SPI_FLAG_TIMEOUT)) // 长操作超时计数
/* W25Q64 芯片参数 */
#define sFLASH_ID 0xEF4017 // W25Q64 的JEDEC ID
#define DUMMY_BYTE 0xFF // 空字节(用于读取操作)
#define WIP_FLAG 0x01 // 状态寄存器忙标志位
/* Flash 物理参数 */
#define SPI_FLASH_PageSize 256 // 页大小(字节)
#define SPI_FLASH_SectorSize 4096 // 扇区大小(字节)
#define SPI_FLASH_WorkPageSize 256 // 单次操作最大字节数
/* W25QXX 命令集 */
typedef enum {
WRITE_ENABLE = 0x06, // 写使能
WRITE_DISABLE = 0x04, // 写禁止
READ_STATUS_REG = 0x05, // 读状态寄存器
WRITE_STATUS_REG = 0x01, // 写状态寄存器
READ_DATA = 0x03, // 标准数据读取
FAST_READ_DATA = 0x0B, // 快速数据读取(需要额外dummy byte)
PAGE_PROGRAM = 0x02, // 页编程命令
SECTOR_ERASE = 0x20, // 4KB扇区擦除
CHIP_ERASE = 0xC7, // 整片擦除
POWER_DOWN = 0xB9, // 进入低功耗模式
RELEASE_POWER_DOWN = 0xAB, // 唤醒设备
JEDEC_DEVICE_ID = 0x9F // 读取JEDEC ID
} SPI_Flash_Cmd;
/* 调试输出配置 */
#define FLASH_DEBUG_ON 1 // 调试信息开关
// 信息输出宏(始终启用)
#define FLASH_INFO(fmt, ...) printf("<<-FLASH-INFO->> " fmt "\n", ##__VA_ARGS__)
#define FLASH_ERROR(fmt, ...) printf("<<-FLASH-ERROR->> " fmt "\n", ##__VA_ARGS__)
// 调试输出宏(受FLASH_DEBUG_ON控制)
#if FLASH_DEBUG_ON
#define FLASH_DEBUG(fmt, ...) printf("<<-FLASH-DEBUG->> [%d] " fmt "\n", __LINE__, ##__VA_ARGS__)
#else
#define FLASH_DEBUG(fmt, ...)
#endif
/* =============== SPI 硬件配置 =============== */
/* SPI 外设配置 */
#define FLASH_SPI SPI1
#define FLASH_SPI_CLK RCC_APB2Periph_SPI1
/* GPIO 引脚配置结构体 */
typedef struct {
GPIO_TypeDef* port; // GPIO端口
uint16_t pin; // 引脚号
uint32_t rcc_clk; // 对应的RCC时钟
} SPI_PinConfig;
// CS 引脚配置 (PC0)
#define FLASH_CS_CONFIG {GPIOC, GPIO_Pin_0, RCC_APB2Periph_GPIOC}
// SCK 引脚配置 (PA5)
#define FLASH_SCK_CONFIG {GPIOA, GPIO_Pin_5, RCC_APB2Periph_GPIOA}
// MISO 引脚配置 (PA6)
#define FLASH_MISO_CONFIG {GPIOA, GPIO_Pin_6, RCC_APB2Periph_GPIOA}
// MOSI 引脚配置 (PA7)
#define FLASH_MOSI_CONFIG {GPIOA, GPIO_Pin_7, RCC_APB2Periph_GPIOA}
/* 控制宏 */
#define SPI_FLASH_CS_LOW() GPIO_ResetBits(FLASH_CS_CONFIG.port, FLASH_CS_CONFIG.pin)
#define SPI_FLASH_CS_HIGH() GPIO_SetBits(FLASH_CS_CONFIG.port, FLASH_CS_CONFIG.pin)
/* 函数声明 */
void SPI_Flash_Init(void); // 初始化SPI Flash
uint32_t SPI_Flash_ReadID(void); // 读取设备ID
void SPI_Flash_EraseSector(uint32_t SectorAddr); // 擦除扇区(4KB)
void SPI_Flash_WritePage(uint8_t* pBuffer, // 页编程(最大256字节)
uint32_t WriteAddr,
uint16_t NumByteToWrite);
void SPI_Flash_ReadBuffer(uint8_t* pBuffer, // 读取数据
uint32_t ReadAddr,
uint16_t NumByteToRead);
void SPI_Flash_ChipErase(void); // 全片擦除
void SPI_Flash_WriteEnable(void); // 写使能
void SPI_Flash_WriteDisable(void); // 写禁止
void SPI_Flash_PowerDown(void); // 进入低功耗
void SPI_Flash_WakeUp(void); // 唤醒设备
void SPI_Flash_WriteBuffer(uint8_t* buffer, // 任意位置写入(自动分页)
uint32_t addr,
uint32_t size);
#endif /* __SPI_FLASH_H__ */
3.2 spi_flash配置和主要功能函数
#include "spi_flash.h"
/* =============== 硬件配置 =============== */
static SPI_PinConfig CS_Config = FLASH_CS_CONFIG;
static SPI_PinConfig SCK_Config = FLASH_SCK_CONFIG;
static SPI_PinConfig MISO_Config = FLASH_MISO_CONFIG;
static SPI_PinConfig MOSI_Config = FLASH_MOSI_CONFIG;
/* =============== 局部变量 =============== */
static __IO uint32_t SPITimeout = SPI_FLAG_TIMEOUT; // SPI操作超时计数器
/* =============== 辅助函数 =============== */
// 简化CS控制宏
#define CS_LOW() GPIO_ResetBits(CS_Config.port, CS_Config.pin)
#define CS_HIGH() GPIO_SetBits(CS_Config.port, CS_Config.pin)
/**
* @brief SPI超时回调函数
* @param errorcode: 错误代码(0=发送超时, 1=接收超时)
* @retval 总是返回0(用于SPI传输)
*/
static uint8_t SPI_TIMEOUT_Callback(uint8_t errorcode)
{
FLASH_ERROR("SPI timeout! Error code: %d", errorcode);
return 0; // 返回0作为安全值
}
/**
* @brief SPI单字节传输
* @param data: 要发送的数据
* @retval 接收到的数据
*/
static uint8_t SPI_TransferByte(uint8_t data)
{
// 等待发送缓冲区空(TXE=1)
uint32_t timeout = SPI_FLAG_TIMEOUT;
while (!SPI_I2S_GetFlagStatus(FLASH_SPI, SPI_I2S_FLAG_TXE)) {
if (timeout-- == 0) return SPI_TIMEOUT_Callback(0);
}
// 写入数据到数据寄存器
SPI_I2S_SendData(FLASH_SPI, data);
// 等待接收缓冲区非空(RXNE=1)
timeout = SPI_FLAG_TIMEOUT;
while (!SPI_I2S_GetFlagStatus(FLASH_SPI, SPI_I2S_FLAG_RXNE)) {
if (timeout-- == 0) return SPI_TIMEOUT_Callback(1);
}
// 读取接收到的数据
return SPI_I2S_ReceiveData(FLASH_SPI);
}
/**
* @brief 发送24位地址
* @param addr: 24位地址(0-16MB范围)
*/
static void SPI_SendAddress(uint32_t addr)
{
SPI_TransferByte((addr >> 16) & 0xFF); // 地址高字节(23-16位)
SPI_TransferByte((addr >> 8) & 0xFF); // 地址中字节(15-8位)
SPI_TransferByte(addr & 0xFF); // 地址低字节(7-0位)
}
/**
* @brief 等待Flash操作完成
* @note 轮询状态寄存器,直到WIP标志清除
*/
static void SPI_Flash_WaitBusy(void)
{
uint8_t status;
uint32_t timeout = SPI_LONG_TIMEOUT; // 使用长超时等待擦除/写入完成
do {
CS_LOW();
SPI_TransferByte(READ_STATUS_REG); // 发送读状态寄存器命令
status = SPI_TransferByte(DUMMY_BYTE); // 读取状态寄存器值
CS_HIGH();
if (timeout-- == 0) {
FLASH_ERROR("WaitBusy timeout!");
break;
}
} while (status & WIP_FLAG); // 检查忙标志(WIP)
}
/* =============== 公共函数 =============== */
/**
* @brief 初始化SPI Flash
* @note 配置SPI引脚和SPI外设
*/
void SPI_Flash_Init(void)
{
SPI_InitTypeDef spiInit = {0};
GPIO_InitTypeDef gpioInit = {0};
// 1. 使能时钟 (SPI1和所有GPIO端口)
RCC_APB2PeriphClockCmd(FLASH_SPI_CLK | CS_Config.rcc_clk |
SCK_Config.rcc_clk | MISO_Config.rcc_clk |
MOSI_Config.rcc_clk, ENABLE);
// 2. 配置CS引脚 (推挽输出)
gpioInit.GPIO_Pin = CS_Config.pin;
gpioInit.GPIO_Mode = GPIO_Mode_Out_PP;
gpioInit.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(CS_Config.port, &gpioInit);
// 3. 配置SCK和MOSI引脚 (复用推挽输出)
gpioInit.GPIO_Pin = SCK_Config.pin | MOSI_Config.pin;
gpioInit.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_Init(SCK_Config.port, &gpioInit);
// 4. 配置MISO引脚 (浮空输入)
gpioInit.GPIO_Pin = MISO_Config.pin;
gpioInit.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 浮空输入模式
GPIO_Init(MISO_Config.port, &gpioInit);
// 5. 初始CS高电平(不选中芯片)
CS_HIGH();
// 6. 配置SPI参数
spiInit.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 双线全双工
spiInit.SPI_Mode = SPI_Mode_Master; // 主机模式
spiInit.SPI_DataSize = SPI_DataSize_8b; // 8位数据
spiInit.SPI_CPOL = SPI_CPOL_High; // 时钟极性:空闲时高电平
spiInit.SPI_CPHA = SPI_CPHA_2Edge; // 时钟相位:第二个边沿采样
spiInit.SPI_NSS = SPI_NSS_Soft; // 软件控制NSS
spiInit.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; // SPI时钟=系统时钟/4
spiInit.SPI_FirstBit = SPI_FirstBit_MSB; // 高位在前
spiInit.SPI_CRCPolynomial = 7; // CRC多项式(未使用)
SPI_Init(FLASH_SPI, &spiInit);
// 7. 使能SPI外设
SPI_Cmd(FLASH_SPI, ENABLE);
FLASH_DEBUG("SPI Flash initialized");
}
/**
* @brief 读取设备JEDEC ID
* @retval 24位设备ID
*/
uint32_t SPI_Flash_ReadID(void)
{
uint32_t id = 0;
CS_LOW();
SPI_TransferByte(JEDEC_DEVICE_ID); // 发送JEDEC ID命令
id = SPI_TransferByte(DUMMY_BYTE) << 16; // 制造商ID
id |= SPI_TransferByte(DUMMY_BYTE) << 8; // 存储器类型
id |= SPI_TransferByte(DUMMY_BYTE); // 容量标识
CS_HIGH();
FLASH_DEBUG("Device ID: 0x%06X", id);
return id;
}
/**
* @brief 擦除扇区 (4KB)
* @param sectorAddr: 扇区内的任意地址
*/
void SPI_Flash_EraseSector(uint32_t sectorAddr)
{
// 确保地址对齐到4KB边界
sectorAddr = sectorAddr & ~(SPI_FLASH_SectorSize - 1);
// 发送写使能命令
SPI_Flash_WriteEnable();
// 发送扇区擦除命令
CS_LOW();
SPI_TransferByte(SECTOR_ERASE); // 扇区擦除命令(0x20)
SPI_SendAddress(sectorAddr); // 发送24位地址
CS_HIGH();
// 等待擦除完成
SPI_Flash_WaitBusy();
FLASH_DEBUG("Sector 0x%06X erased", sectorAddr);
}
/**
* @brief 页编程 (最大256字节)
* @param buffer: 数据缓冲区
* @param addr: 写入地址(必须页对齐)
* @param size: 写入字节数(不能超过页边界)
*/
void SPI_Flash_WritePage(uint8_t* buffer, uint32_t addr, uint16_t size)
{
// 确保写入不跨页
uint16_t pageOffset = addr % SPI_FLASH_PageSize;
if (size > (SPI_FLASH_PageSize - pageOffset)) {
size = SPI_FLASH_PageSize - pageOffset;
FLASH_ERROR("Write size truncated to %d bytes", size);
}
// 发送写使能命令
SPI_Flash_WriteEnable();
// 发送页编程命令
CS_LOW();
SPI_TransferByte(PAGE_PROGRAM); // 页编程命令(0x02)
SPI_SendAddress(addr); // 发送24位地址
// 写入数据
for (uint16_t i = 0; i < size; i++) {
SPI_TransferByte(buffer[i]);
}
CS_HIGH();
// 等待写入完成
SPI_Flash_WaitBusy();
FLASH_DEBUG("Written %d bytes to 0x%06X", size, addr);
}
/**
* @brief 读取数据
* @param buffer: 数据缓冲区
* @param addr: 读取起始地址
* @param size: 读取字节数
*/
void SPI_Flash_ReadBuffer(uint8_t* buffer, uint32_t addr, uint16_t size)
{
CS_LOW();
SPI_TransferByte(READ_DATA); // 标准读命令(0x03)
SPI_SendAddress(addr); // 发送24位地址
// 连续读取数据
for (uint16_t i = 0; i < size; i++) {
buffer[i] = SPI_TransferByte(DUMMY_BYTE);
}
CS_HIGH();
FLASH_DEBUG("Read %d bytes from 0x%06X", size, addr);
}
/**
* @brief 全片擦除
* @note 耗时较长(典型值几秒),谨慎使用!
*/
void SPI_Flash_ChipErase(void)
{
// 发送写使能命令
SPI_Flash_WriteEnable();
CS_LOW();
SPI_TransferByte(CHIP_ERASE); // 整片擦除命令(0xC7)
CS_HIGH();
// 等待擦除完成
SPI_Flash_WaitBusy();
FLASH_DEBUG("Chip erase completed");
}
/**
* @brief 写使能
* @note 在执行写/擦除操作前必须调用
*/
void SPI_Flash_WriteEnable(void)
{
CS_LOW();
SPI_TransferByte(WRITE_ENABLE); // 写使能命令(0x06)
CS_HIGH();
}
/**
* @brief 写禁止
*/
void SPI_Flash_WriteDisable(void)
{
CS_LOW();
SPI_TransferByte(WRITE_DISABLE); // 写禁止命令(0x04)
CS_HIGH();
}
/**
* @brief 进入低功耗模式
*/
void SPI_Flash_PowerDown(void)
{
CS_LOW();
SPI_TransferByte(POWER_DOWN); // 掉电命令(0xB9)
CS_HIGH();
// 等待命令完成(小延迟)
for(volatile int i = 0; i < 100; i++);
}
/**
* @brief 唤醒设备
*/
void SPI_Flash_WakeUp(void)
{
CS_LOW();
SPI_TransferByte(RELEASE_POWER_DOWN); // 唤醒命令(0xAB)
CS_HIGH();
// 等待芯片唤醒(典型值3us)
for(volatile int i = 0; i < 1000; i++);
}
/**
* @brief 任意位置写入数据 (自动处理页边界)
* @param buffer: 数据缓冲区
* @param addr: 起始地址
* @param size: 写入字节数
*/
void SPI_Flash_WriteBuffer(uint8_t* buffer, uint32_t addr, uint32_t size)
{
uint32_t currentAddr = addr;
uint32_t bytesRemaining = size;
while (bytesRemaining > 0) {
// 计算当前页剩余空间
uint16_t pageOffset = currentAddr % SPI_FLASH_PageSize;
uint16_t bytesInPage = SPI_FLASH_PageSize - pageOffset;
// 如果剩余数据小于页剩余空间,则全部写入
if (bytesInPage > bytesRemaining) {
bytesInPage = bytesRemaining;
}
// 写入当前页
SPI_Flash_WritePage(buffer, currentAddr, bytesInPage);
// 更新指针和计数器
buffer += bytesInPage;
currentAddr += bytesInPage;
bytesRemaining -= bytesInPage;
}
FLASH_DEBUG("Written %lu bytes starting from 0x%06X", size, addr);
}
3.3 主函数测试
#include "stm32f10x.h"
#include "SysTick.h"
#include "usart.h"
#include "spi_flash.h"
#include <stdio.h>
#include <string.h>
// 测试数据缓冲区
#define TEST_DATA_SIZE 256
uint8_t write_buffer[TEST_DATA_SIZE];
uint8_t read_buffer[TEST_DATA_SIZE];
// 测试地址 (使用第一个扇区的起始地址)
#define TEST_ADDRESS 0x000000
/**
* @brief 填充测试数据
* @param buffer: 数据缓冲区
* @param size: 数据大小
*/
void fill_test_data(uint8_t* buffer, uint32_t size) {
for (uint32_t i = 0; i < size; i++) {
// 生成可读性较好的测试数据
buffer[i] = (i % 26) + 'A'; // 循环填充A-Z
}
}
/**
* @brief 比较两个缓冲区数据
* @param buf1: 缓冲区1
* @param buf2: 缓冲区2
* @param size: 比较大小
* @retval 0: 相等, 其他: 不相等的位置
*/
int compare_buffers(uint8_t* buf1, uint8_t* buf2, uint32_t size) {
for (uint32_t i = 0; i < size; i++) {
if (buf1[i] != buf2[i]) {
return i + 1; // 返回不相等的位置(从1开始)
}
}
return 0;
}
int main(void)
{
uint32_t flash_id;
int compare_result;
// 初始化外设
SysTick_Init();
USARTx_Init();
printf("\r\n===== SPI Flash Function Test =====\r\n");
// 初始化SPI Flash
printf("Initializing SPI Flash...\r\n");
SPI_Flash_Init();
printf("SPI Flash initialized successfully!\r\n");
// 测试1: 读取设备ID
printf("\r\n[Test 1] Reading Device ID...\r\n");
flash_id = SPI_Flash_ReadID();
printf("Device ID: 0x%06lX\r\n", flash_id);
// 检查ID是否正确 (W25Q64的ID是0xEF4017)
if (flash_id == sFLASH_ID) {
printf("Device ID verification successful!\r\n");
} else {
printf("Error: Device ID mismatch!\r\n");
}
// 测试2: 扇区擦除
printf("\r\n[Test 2] Erasing Sector (0x%06lX)...\r\n", TEST_ADDRESS);
SPI_Flash_EraseSector(TEST_ADDRESS);
printf("Sector erase completed!\r\n");
// 测试3: 写入数据
printf("\r\n[Test 3] Writing test data...\r\n");
// 填充测试数据
fill_test_data(write_buffer, TEST_DATA_SIZE);
// 写入数据到Flash
SPI_Flash_WriteBuffer(write_buffer, TEST_ADDRESS, TEST_DATA_SIZE);
printf("Written %d bytes of data\r\n", TEST_DATA_SIZE);
// 打印部分写入数据
printf("First 16 bytes of written data: ");
for (int i = 0; i < 16; i++) {
printf("%02X ", write_buffer[i]);
}
printf("\r\n");
// 测试4: 读取数据
printf("\r\n[Test 4] Reading data...\r\n");
SPI_Flash_ReadBuffer(read_buffer, TEST_ADDRESS, TEST_DATA_SIZE);
printf("Read %d bytes of data\r\n", TEST_DATA_SIZE);
// 打印部分读取数据
printf("First 16 bytes of read data: ");
for (int i = 0; i < 16; i++) {
printf("%02X ", read_buffer[i]);
}
printf("\r\n");
// 测试5: 数据验证
printf("\r\n[Test 5] Verifying data...\r\n");
compare_result = compare_buffers(write_buffer, read_buffer, TEST_DATA_SIZE);
if (compare_result == 0) {
printf("Data verification successful! Write and read data match.\r\n");
} else {
printf("Error: Data mismatch at position: %d\r\n", compare_result);
printf("Expected: 0x%02X, Actual: 0x%02X\r\n",
write_buffer[compare_result-1],
read_buffer[compare_result-1]);
}
// 测试6: 低功耗模式测试
printf("\r\n[Test 6] Power down mode test...\r\n");
printf("Entering power down mode...\r\n");
SPI_Flash_PowerDown();
Delay_ms(1000); // 保持1秒低功耗状态
printf("Waking up device...\r\n");
SPI_Flash_WakeUp();
Delay_ms(100); // 等待唤醒完成
printf("Device awakened successfully!\r\n");
// 最终状态指示
printf("\r\n===== Test Completed =====\r\n");
while(1) {
// 主循环中不执行任何操作
}
}
4. SPI常见函数(STD库)
4.1 SPI配置步骤
4.1.1 使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); // SPI1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // GPIO时钟
4.1.2 配置GPIO引脚
GPIO_InitTypeDef GPIO_InitStruct;
// SCK/MOSI引脚配置(复用推挽输出)
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7; // PA5=SCK, PA7=MOSI
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// MISO引脚配置(浮空输入)
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6; // PA6=MISO
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// NSS引脚配置(软件控制)
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4; // PA4=NSS
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_SetBits(GPIOA, GPIO_Pin_4); // 初始高电平
4.1.3 SPI参数配置
SPI_InitTypeDef SPI_InitStruct;
SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 全双工
SPI_InitStruct.SPI_Mode = SPI_Mode_Master; // 主模式
SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b; // 8位数据
SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low; // 时钟极性
SPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge; // 时钟相位
SPI_InitStruct.SPI_NSS = SPI_NSS_Soft; // 软件NSS控制
SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; // 18MHz
SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB; // 高位在前
SPI_InitStruct.SPI_CRCPolynomial = 7; // CRC多项式
SPI_Init(SPI1, &SPI_InitStruct); // 应用配置
SPI_Cmd(SPI1, ENABLE); // 使能SPI
4.2 核心操作函数
4.2.1 发送/接收数据
// 阻塞式发送单字节
void SPI_SendByte(SPI_TypeDef* SPIx, uint8_t data) {
while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET); // 等待发送缓冲区空
SPI_I2S_SendData(SPIx, data);
}
// 阻塞式接收单字节
uint8_t SPI_ReceiveByte(SPI_TypeDef* SPIx) {
while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET); // 等待接收完成
return SPI_I2S_ReceiveData(SPIx);
}
// 全双工传输(发送同时接收)
uint8_t SPI_TransmitReceive(SPI_TypeDef* SPIx, uint8_t txData) {
SPI_SendByte(SPIx, txData);
return SPI_ReceiveByte(SPIx);
}
4.2.2 多字节传输
void SPI_SendBuffer(SPI_TypeDef* SPIx, uint8_t* pBuffer, uint16_t len) {
while (len--) {
SPI_SendByte(SPIx, *pBuffer++);
}
}
void SPI_ReceiveBuffer(SPI_TypeDef* SPIx, uint8_t* pBuffer, uint16_t len) {
while (len--) {
*pBuffer++ = SPI_ReceiveByte(SPIx);
}
}
4.3 片选控制
// 软件控制片选
void SPI_CS_Enable(void) {
GPIO_ResetBits(GPIOA, GPIO_Pin_4); // 拉低片选
}
void SPI_CS_Disable(void) {
GPIO_SetBits(GPIOA, GPIO_Pin_4); // 拉高片选
}
// 使用示例
SPI_CS_Enable();
SPI_SendByte(SPI1, 0xAA); // 发送命令
SPI_CS_Disable();
4.4 中断配置
4.4.1 使能中断
// 使能TXE(发送缓冲区空中断)和RXNE(接收缓冲区非空中断)
SPI_I2S_ITConfig(SPI1, SPI_I2S_IT_TXE | SPI_I2S_IT_RXNE, ENABLE);
// 配置NVIC
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = SPI1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
4.4.2 中断服务函数
volatile uint8_t spi_tx_complete = 0;
volatile uint8_t spi_rx_complete = 0;
void SPI1_IRQHandler(void) {
// 发送缓冲区空中断
if (SPI_I2S_GetITStatus(SPI1, SPI_I2S_IT_TXE) != RESET) {
// 填充发送数据
static uint8_t tx_data = 0;
SPI_I2S_SendData(SPI1, tx_data++);
if (tx_data == 0) {
SPI_I2S_ITConfig(SPI1, SPI_I2S_IT_TXE, DISABLE); // 关闭发送中断
spi_tx_complete = 1;
}
}
// 接收缓冲区非空中断
if (SPI_I2S_GetITStatus(SPI1, SPI_I2S_IT_RXNE) != RESET) {
uint8_t rx_data = SPI_I2S_ReceiveData(SPI1);
// 处理接收数据...
spi_rx_complete = 1;
}
}
4.5 DMA 配置
4.5.1 使能SPI DMA请求
// 使能SPI发送DMA请求
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Tx, ENABLE);
// 使能SPI接收DMA请求
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Rx, ENABLE);
4.5.2 配置DMA通道
// SPI1_TX使用DMA1通道3
DMA_InitTypeDef DMA_InitStruct;
DMA_InitStruct.DMA_PeripheralBaseAddr = (uint32_t)&SPI1->DR;
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)tx_buffer;
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralDST; // 内存->外设
DMA_InitStruct.DMA_BufferSize = BUFFER_SIZE;
// ...其他DMA配置
DMA_Init(DMA1_Channel3, &DMA_InitStruct);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号