
第2章 GPIO介绍及应用
第二章 GPIO介绍及应用
1. GPIO简介
GPIO 是通用输入输出端口的简称,简单来说就是 STM32 可控制的引脚, STM32 芯片的 GPIO 引脚与外部设备连接起来,从而实现与外部通讯、控制以及数据采集的功能。 STM32 芯片的 GPIO被分成很多组,每组有 16 个引脚,如型号为 STM32F103VET6 型号的芯片有 GPIOA、 GPIOB、GPIOC 至 GPIOE 共 5 组 GPIO,芯片一共 100 个引脚,其中 GPIO 就占了一大部分,所有的 GPIO引脚都有基本的输入输出功能。
最基本的输出功能是由 STM32 控制引脚输出高、低电平,实现开关控制,如把 GPIO 引脚接入到 LED 灯,那就可以控制 LED 灯的亮灭,引脚接入到继电器或三极管,那就可以通过继电器或三极管控制外部大功率电路的通断。
最基本的输入功能是检测外部输入电平,如把 GPIO 引脚连接到按键,通过电平高低区分按键是否被按下。
2. GPIO工作模式
总结一下,由 GPIO 的结构决定了 GPIO 可以配置成以下模式:
typedef enum
{
GPIO_Mode_AIN = 0x0, // 模拟输入
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入
GPIO_Mode_IPD = 0x28, // 下拉输入
GPIO_Mode_IPU = 0x48, // 上拉输入
GPIO_Mode_Out_OD = 0x14, // 开漏输出
GPIO_Mode_Out_PP = 0x10, // 推挽输出
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出
} GPIOMode_TypeDef;
在标准库中, GPIO 总共有 8 种细分的工作模式,稍加整理可以大致归类为以下三类:
2.2.1 输入模式(模拟/浮空/上拉/下拉)
在输入模式时,施密特触发器打开,输出被禁止,可通过输入数据寄存器 GPIOx_IDR 读取 I/O 状态。其中输入模式,可设置为上拉、下拉、浮空和模拟输入四种。上拉和下拉输入很好理解,默认的电平由上拉或者下拉决定。浮空输入的电平是不确定的,完全由外部的输入决定,一般接按键的时候用的是这个模式。模拟输入则用于 ADC 采集。
2.2.2 输出模式(推挽/开漏)
在输出模式中,推挽模式时双 MOS 管以轮流方式工作,输出数据寄存器 GPIOx_ODR 可控制 I/O输出高低电平。开漏模式时,只有 N-MOS 管工作,输出数据寄存器可控制 I/O 输出高阻态或低电平。输出速度可配置,有 2MHz10MHz50MHz 的选项。此处的输出速度即 I/O 支持的高低电平状态最高切换频率,支持的频率越高,功耗越大,如果功耗要求不严格,把速度设置成最大即可
在输出模式时施密特触发器是打开的,即输入可用,通过输入数据寄存器 GPIOx_IDR 可读取 I/O的实际状态。
2.2.3 复用功能(推挽/开漏)
复用功能模式中,输出使能,输出速度可配置,可工作在开漏及推挽模式,但是输出信号源于其它外设,输出数据寄存器 GPIOx_ODR 无效;输入可用,通过输入数据寄存器可获取 I/O 实际状态,但一般直接用外设的寄存器来获取该数据信号。
3. GPIO使用示例
3.1 GPIO输出-点亮LED
3.1.1 led相关参数宏定义
#ifndef __LED_H__
#define __LED_H__
#include "stm32f10x.h"
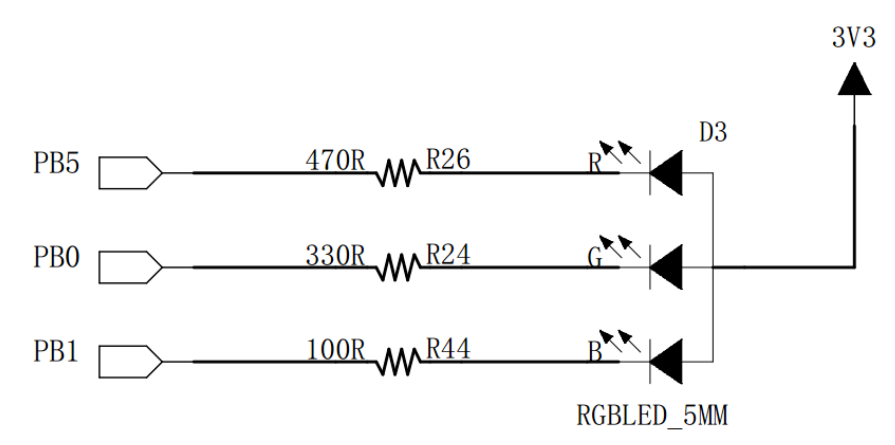
#define LED_GPIO_Port GPIOB
#define LED_GPIO_CLK RCC_APB2Periph_GPIOB
#define RED_LED_Pin GPIO_Pin_5
#define GREEN_LED_Pin GPIO_Pin_0
#define BLUE_LED_Pin GPIO_Pin_1
#define LED_ON(x) GPIO_SetBits(LED_GPIO_Port, (x))
#define LED_OFF(x) GPIO_ResetBits(LED_GPIO_Port, (x))
#endif /* __LED_H__ */
3.1.2 GPIO初始化
#include "led.h"
void BSP_LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(LED_GPIO_CLK, ENABLE); // 打开GPIO时钟
// 初始化红色 LED 引脚
GPIO_InitStructure.GPIO_Pin = RED_LED_Pin; // 选择引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 输出速度
GPIO_Init(LED_GPIO_Port, &GPIO_InitStructure);
// 初始化绿色 LED 引脚
GPIO_InitStructure.GPIO_Pin = GREEN_LED_Pin;
GPIO_Init(LED_GPIO_Port, &GPIO_InitStructure);
// 初始化蓝色 LED 引脚
GPIO_InitStructure.GPIO_Pin = BLUE_LED_Pin;
GPIO_Init(LED_GPIO_Port, &GPIO_InitStructure);
// 初始LED全灭
LED_OFF(RED_LED_Pin);
LED_OFF(GREEN_LED_Pin);
LED_OFF(BLUE_LED_Pin);
}
3.1.3 主函数测试
#include "stm32f10x.h"
#include "led.h"
#define led_delay delay(0x0FFFFF);
void delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
int main()
{
BSP_LED_Init();
while(1)
{
LED_ON(RED_LED_Pin);
led_delay;
LED_OFF(RED_LED_Pin);
led_delay;
LED_ON(GREEN_LED_Pin);
led_delay;
LED_OFF(GREEN_LED_Pin);
led_delay;
LED_ON(BLUE_LED_Pin);
led_delay;
LED_OFF(BLUE_LED_Pin);
led_delay;
}
}
3.2 GPIO输出-控制蜂鸣器
3.2.1 蜂鸣器相关参数宏定义
#ifndef __BEEP_H__
#define __BEEP_H__
#include "stm32f10x.h"
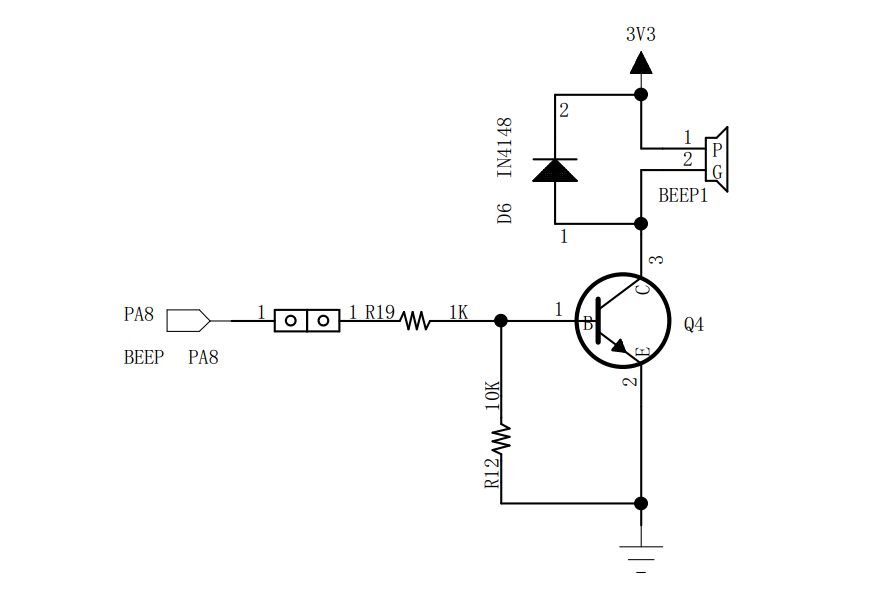
#define Beep_GPIO_Port GPIOA
#define Beep_GPIO_CLK RCC_APB2Periph_GPIOA
#define Beep_GPIO_Pin GPIO_Pin_8
#define BEEP_ON() GPIO_SetBits(Beep_GPIO_Port, Beep_GPIO_Pin)
#define BEEP_OFF() GPIO_ResetBits(Beep_GPIO_Port, Beep_GPIO_Pin)
void BSP_Beep_Init(void);
#endif /* __BEEP_H__ */
3.2.2 GPIO初始化
#include "beep.h"
void BSP_Beep_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(Beep_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = Beep_GPIO_Pin;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Beep_GPIO_Port, &GPIO_InitStructure);
BEEP_OFF();
}
3.2.3 主函数测试
#include "stm32f10x.h"
#include "beep.h"
#define beep_delay delay(0x0FFFFF);
void delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
int main()
{
BSP_Beep_Init();
while(1)
{
BEEP_ON();
beep_delay;
BEEP_OFF();
beep_delay;
}
}
3.3 GPIO输入-按键控制LED
3.3.1 按键相关参数宏定义
#ifndef __KEY_H__
#define __KEY_H__
#include "stm32f10x.h"
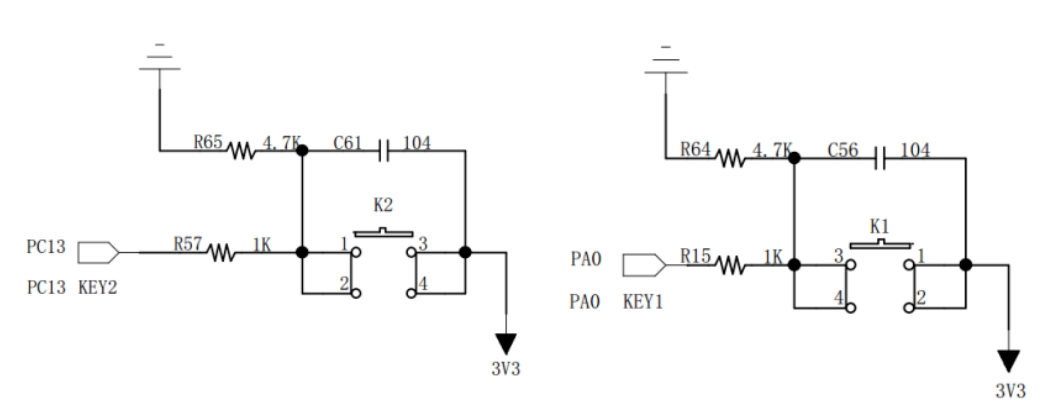
#define KEY1_GPIO_CLK RCC_APB2Periph_GPIOA
#define KEY1_GPIO_Port GPIOA
#define KEY1_GPIO_Pin GPIO_Pin_0
#define KEY2_GPIO_CLK RCC_APB2Periph_GPIOC
#define KEY2_GPIO_Port GPIOC
#define KEY2_GPIO_Pin GPIO_Pin_13
#define KEY_OFF 0
#define KEY_ON 1
void BSP_KEY_Init(void);
uint8_t KEY_Scan(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
#endif /* __KEY_H__ */
3.3.2 GPIO初始化
void BSP_KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(KEY1_GPIO_CLK|KEY2_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = KEY1_GPIO_Pin;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 浮空输入
GPIO_Init(KEY1_GPIO_Port, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = KEY2_GPIO_Pin;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY2_GPIO_Port, &GPIO_InitStructure);
}
3.3.3 按键扫描函数
uint8_t KEY_Scan(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
if(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == KEY_ON) // 读取按键电平
{
while(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == KEY_ON); // 判断按键是否长时间按下
return KEY_ON;
}
else
{
return KEY_OFF;
}
}
3.3.4 主函数测试
#include "stm32f10x.h"
#include "led.h"
#include "key.h"
int main()
{
BSP_LED_Init();
BSP_KEY_Init();
while(1)
{
if(KEY_Scan(KEY1_GPIO_Port, KEY1_GPIO_Pin) == KEY_ON)
{
LED_ON(RED_LED_Pin);
}
if(KEY_Scan(KEY2_GPIO_Port, KEY2_GPIO_Pin) == KEY_ON)
{
LED_OFF(RED_LED_Pin);
}
}
}
4. GPIO常见函数(STD库)
4.1 初始化与配置
- 使能GPIO时钟
使用RCC_APB2PeriphClockCmd()开启对应GPIO端口的时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOA时钟
- GPIO初始化
通过GPIO_Init()配置引脚模式、速度等参数:
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; // 配置PA0
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出模式
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; // 速度50MHz
GPIO_Init(GPIOA, &GPIO_InitStruct); // 应用配置
4.2 输出操作
- 设置引脚为高电平
GPIO_SetBits()将指定引脚置高:
GPIO_SetBits(GPIOA, GPIO_Pin_0); // PA0输出高电平
- 设置引脚为低电平
GPIO_ResetBits()将指定引脚置低:
GPIO_ResetBits(GPIOA, GPIO_Pin_0); // PA0输出低电平
- 按位写入引脚状态
GPIO_WriteBit()灵活设置单个引脚状态(Bit_SET或Bit_RESET):
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET); // PA0输出高
- 写入整个端口
GPIO_Write()一次性设置所有引脚状态:
GPIO_Write(GPIOA, 0x01); // PA0置高,其余置低
4.3 输入操作
- 读取单个引脚输入状态
GPIO_ReadInputDataBit()获取输入引脚的电平:
uint8_t value = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0); // 读取PA0输入值
- 读取整个端口输入值
GPIO_ReadInputData()返回端口的16位输入数据:
uint16_t port_value = GPIO_ReadInputData(GPIOA); // 读取GPIOA所有输入引脚
4.4 输出状态读取
- 读取输出寄存器状态
GPIO_ReadOutputDataBit()和GPIO_ReadOutputData()用于读取输出寄存器的值(可能与实际引脚状态不同):
uint8_t output_bit = GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_0); // 读取PA0输出寄存器状态
uint16_t output_port = GPIO_ReadOutputData(GPIOA); // 读取GPIOA输出寄存器全部状态
4.5 其他函数
- 引脚配置锁定
GPIO_PinLockConfig()锁定引脚配置,防止意外修改:
GPIO_PinLockConfig(GPIOA, GPIO_Pin_0); // 锁定PA0配置

 浙公网安备 33010602011771号
浙公网安备 33010602011771号