电力电子 第3章 DC-DC变换电路
前提
- 忽略开关器件的暂态,电阻、电容也均视为理想器件。
- 滤波电容很大,稳态时电压近似不变。
- 电感很大,电流变化近似为线性。
3.1 基本斩波电路
3.1.1 直流降压电路(Buck)
-
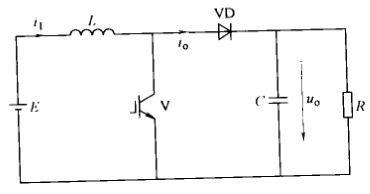
结构
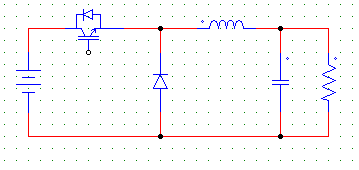
-
原理
导通时,电源、IGBT、电感、电容、电阻形成回路;关断时,二极管、电感、电容、电阻形成回路,电感续流。电感输出的电流中的高频分量通过电容回到电源负极,留给电阻的主要是直流量。
-
算式
-
输出电压
假设已达到稳态,输出电压\(u_o=U_o=Const\)。
\[\left\{ \begin{aligned} &L\frac{\Delta i_{on}}{t_{on}}=E-U_o\\ &L\frac{\Delta i_{off}}{t_{off}}=-U_o\\ \end{aligned} \right.\\ 平衡时有\Delta i_{on}=-\Delta i_{off}\\ \Rightarrow U_o=\frac{t_{on}}{t_{on}+t_{off}}E=DE \]其中\(D=\frac{t_{on}}{t_{on}+t_{off}}\)是控制信号的占空比。
-
输出电压纹波(近似)
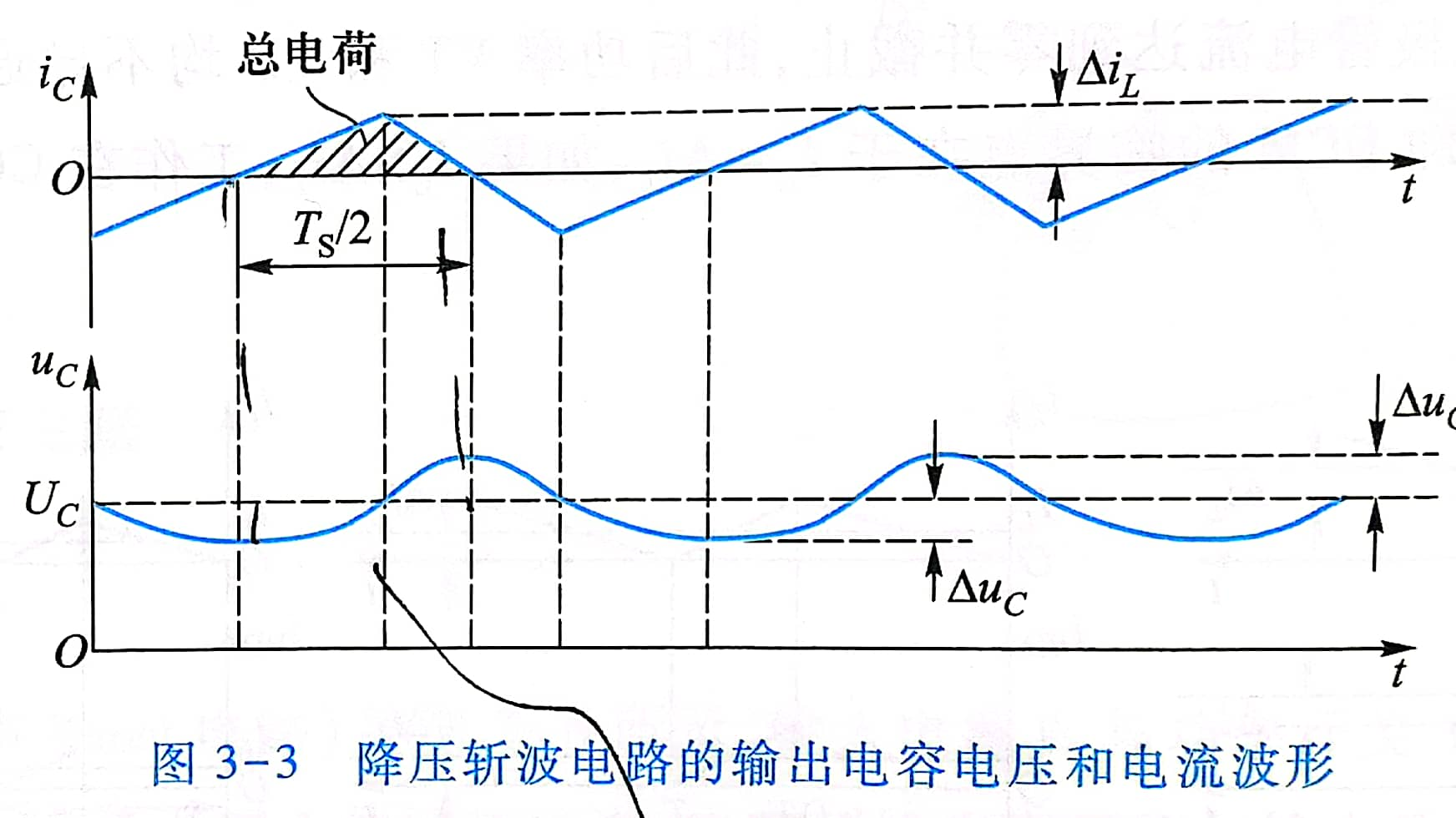 $$
\Delta u_C=\frac{\Delta i_LT_s}{8C}=\frac{D(1-D)ET_s^2}{16LC}
$$
$$
\Delta u_C=\frac{\Delta i_LT_s}{8C}=\frac{D(1-D)ET_s^2}{16LC}
$$
注意图中\(\Delta i_L\)和\(\Delta u_C\)的定义,是相对平均值的变化量。
可见,增大电容或者增大信号频率都可以减小纹波。
-
-
有两种工作模式:连续导通模式(Continuous Current Mode, CCM),不连续导通模式(Discontinuous Current Mode, DCM)
- 当电流纹波大于电流直流分量时,即会发生电流断续,进入不连续导通模式。
- 稳定时仍然满足电感的伏秒平衡和电容的安秒平衡,可以利用二者求出输出值。
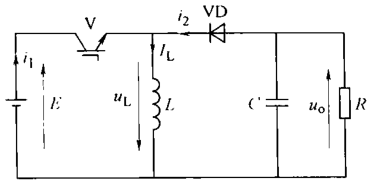
3.1.2 直流升压电路(Boost)
-
结构
-
原理:导通时,电感充磁,电容向负载放电;关断时,主要是电感为电容充电。
-
算式
\[\left\{ \begin{aligned} &L\frac{\Delta i_{on}}{t_{on}}=E\\ &L\frac{\Delta i_{off}}{t_{off}}=E-U_o\\ \end{aligned} \right.\\ 平衡时有\Delta i_{on}=-\Delta i_{off}\\ \Rightarrow U_o=\frac{t_{on}+t_{off}}{t_{off}}E=\frac{1}{1-D}E \] -
与Buck类似,会有电流断续问题。
3.1.3 直流升降压电路(Buck-Boost)
-
结构
相比Buck只是把电感和二极管换了个位置,但是要注意输出电压的方向反了。
-
原理:导通时,电感充磁,电容向负载放电;关断时,电感向电容充电。
-
算式
\[\left\{ \begin{aligned} &L\frac{\Delta i_{on}}{t_{on}}=E\\ &L\frac{\Delta i_{off}}{t_{off}}=-U_o\\ \end{aligned} \right.\\ 平衡时有\Delta i_{on}=-\Delta i_{off}\\ \Rightarrow U_o=\frac{t_{on}}{t_{off}}E=\frac{D}{1-D}E \]从算式上来说,相当于一个Buck乘上一个Boost。
-
与Buck类似,会有电流断续问题。
3.2 复合斩波电路
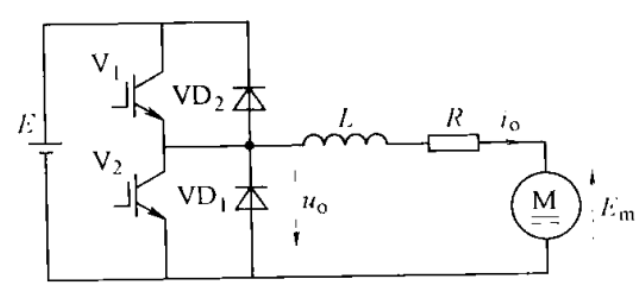
3.2.1 半桥斩波电路(Half-Bridge)
-
结构
-
原理
工作象限:以平均输出电流为横轴,平均输出电压为纵轴,可以将斩波电路的工作状态分为四种:
第1象限 第2象限 第3象限 第4象限 平均输出电压 + + - - 平均输出电流 + - - + 电机工作状态 正向电动 正向再生制动 反向电动 反向再生制动 - “再生制动”其实也就是发电的意思嘛。
-
第1象限工作方式
和Buck一模一样
- \(V_1\)接控制信号,\(V_2\)关断。
- \(U_o=DE\)
-
第2象限工作方式
电机作为输入,电源作为输出的Boost
- \(V_1\)关断,\(V_2\)接控制信号,与之前的Boost斩波电路的不同在于关断时是电机在给电源输送能量。
- \(U_o=D\cdot0+(1-D)(E)=(1-D)E\)
-
第1、2象限交替工作方式
先进行第1象限工作模式,等到出现电流断续时,再进入第2象限工作模式,然后再次等到电流断续,之后便如此往复。
-
互补控制方式
- 两个晶闸管交替导通,为了避免直通现象插入了死区。
- 若负载电压小于电源电压,则类似于第1象限工作方式。
- 若负载电压大于电源电压,则类似于第2象限工作方式。
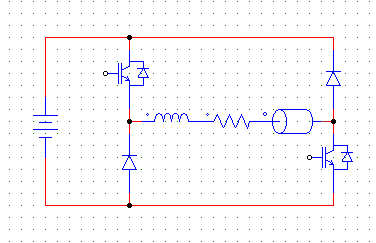
3.2.2 不对称半桥斩波电路
-
结构(图中的圆柱体代指电机,左侧为正;左上角为\(VT_1\),右下角为\(VT_2\))
-
斩双管工作方式
- 两只IGBT同时导通、关断,负载两端电压是电源电压或其负值,所以再第1象限和第4象限交替工作。
- \(U_o=DE+(1-D)(-E)=(2D-1)E\)
-
斩单管工作方式
-
\(VT_1\)(左上角)进行控制,\(VT_2\)(右下角)始终导通,则成为Buck,工作在第1象限。
计算:\(U_o=DE\)
-
\(VT_1\)(左上角)始终关断,\(VT_2\)(右下角)进行控制,则成为电机作输入、电源作输出的Boost,工作在第4象限。
计算:\(U_o=-(1-D)E\)
-
3.2.3 全桥斩波电路
-
结构
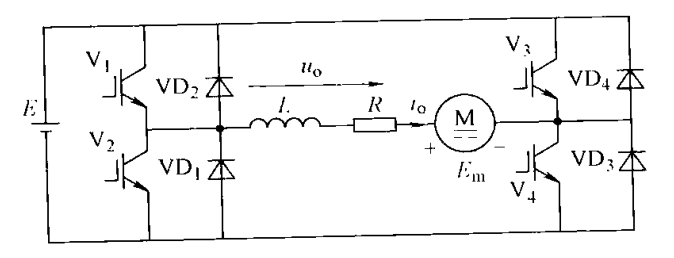
图中的VD1和VD2标号换个位置,VD3和VD4标号换个位置。
-
原理和计算
-
斩单管:0代表关断,1代表导通,PWM代表控制信号。
象限 \(VT_1\) \(VT_2\) \(VT_3\) \(VT_4\) 等效电路 平均输出电压 电机状态 1 PWM 0 0 1 Buck \(DE\) 正向电动 2 0 PWM 0 0 反向Boost \((1-D)E\) 正向再生制动 3 0 1 PWM 0 Buck \(-DE\) 反向电动 4 0 0 0 PWM 反向Boost \(-(1-D)E\) 反向再生制动 “反向Boost”就是指“电机作输入、电源作输出的Boost”,自己取的名字。
-
斩双管
象限 \(VT_1\) \(VT_2\) \(VT_3\) \(VT_4\) 等效电路 平均输出电压 电机状态 1 PWM 0 0 PWM 斩双管不对称半桥 \((2D-1)E\) 正向电动 2 0 PWM PWM 0 斩双管不对称半桥 \(-(2D-1)E\) 正向再生制动 3 0 PWM PWM 0 斩双管不对称半桥 \(-(2D-1)E\) 反向电动 4 PWM 0 0 PWM 斩双管不对称半桥 \((2D-1)E\) 反向再生制动
-

 浙公网安备 33010602011771号
浙公网安备 33010602011771号