基于滑膜控制器的分数阶非线性悬架模型simulink建模与仿真
1.课题概述
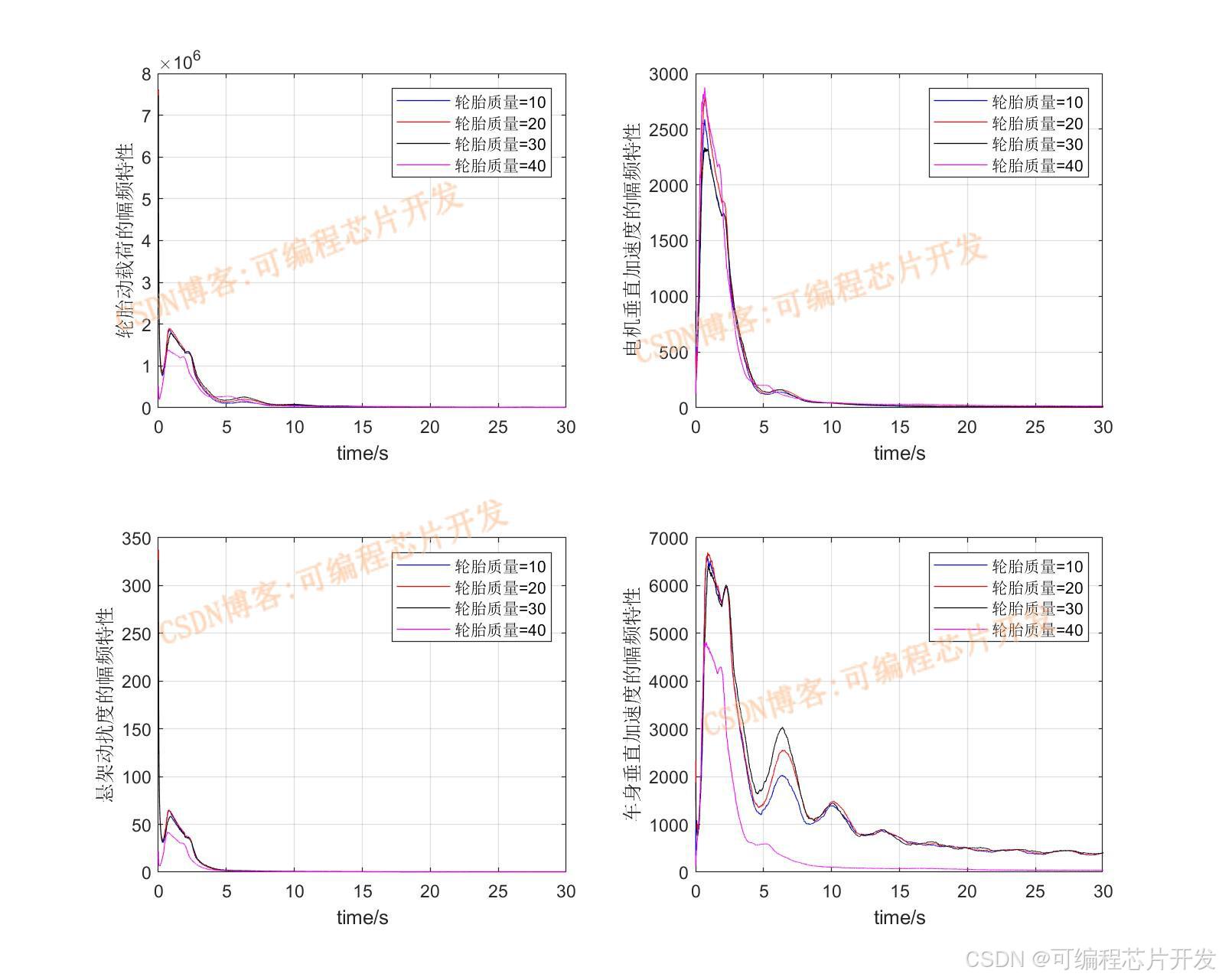
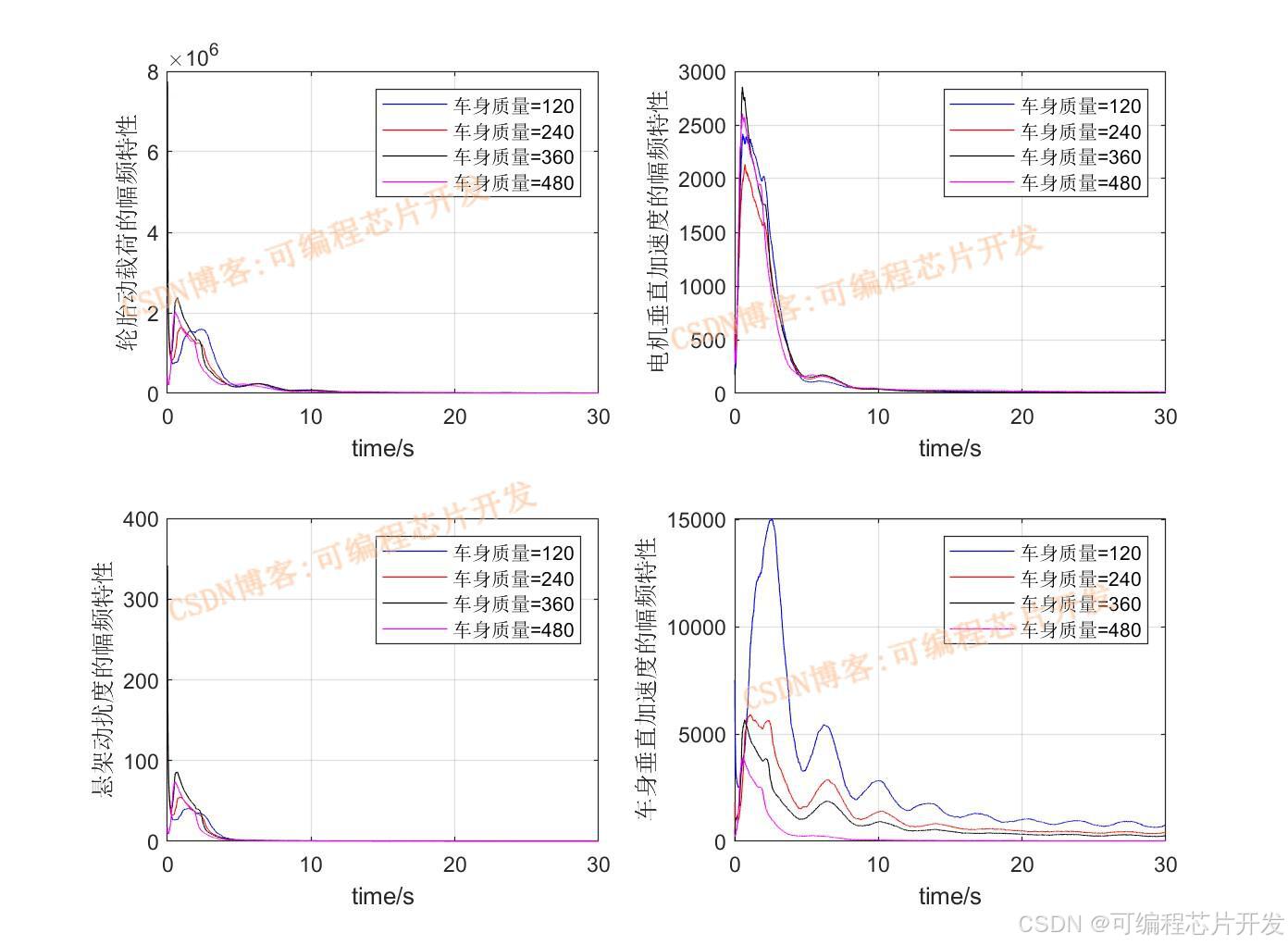
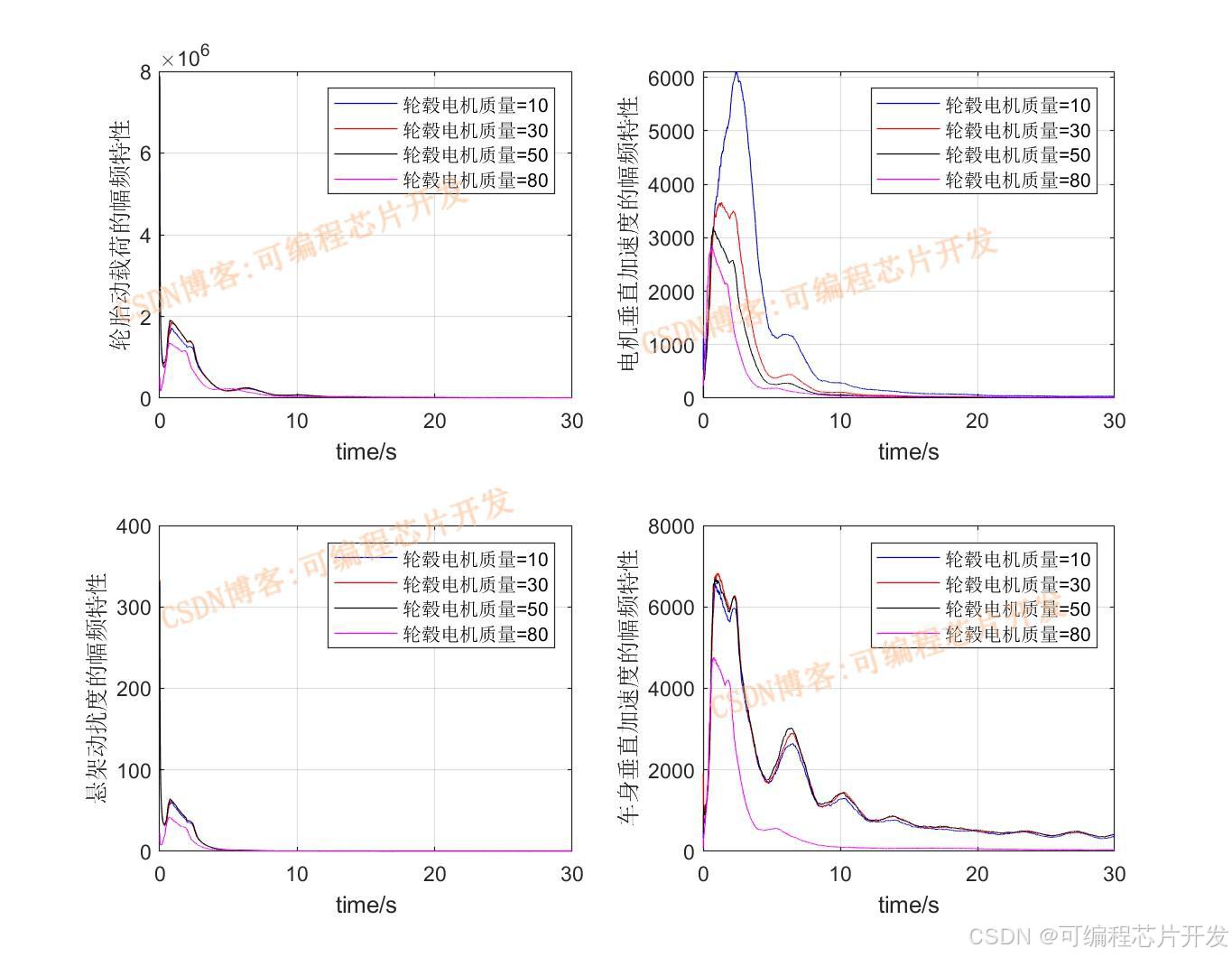
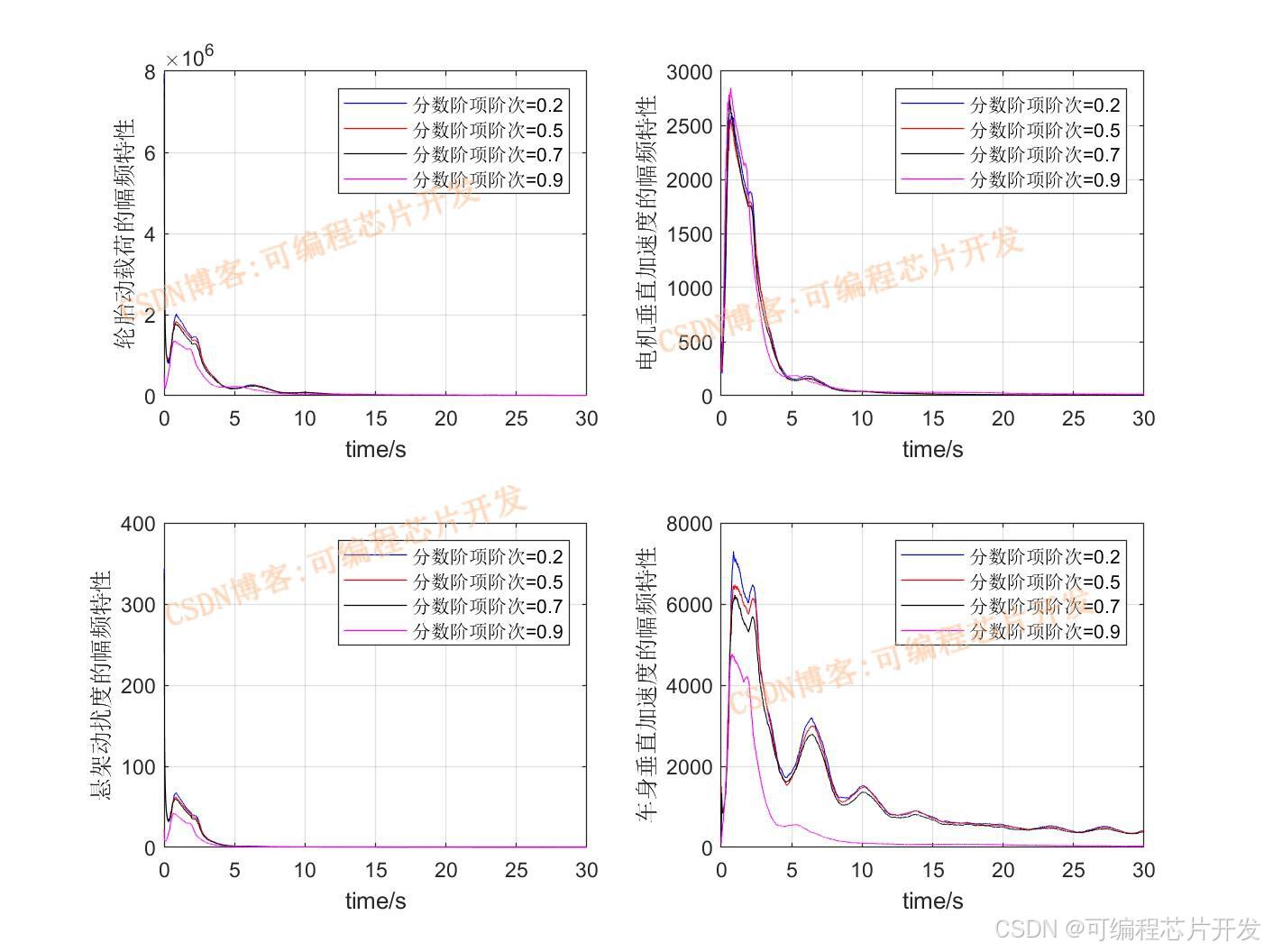
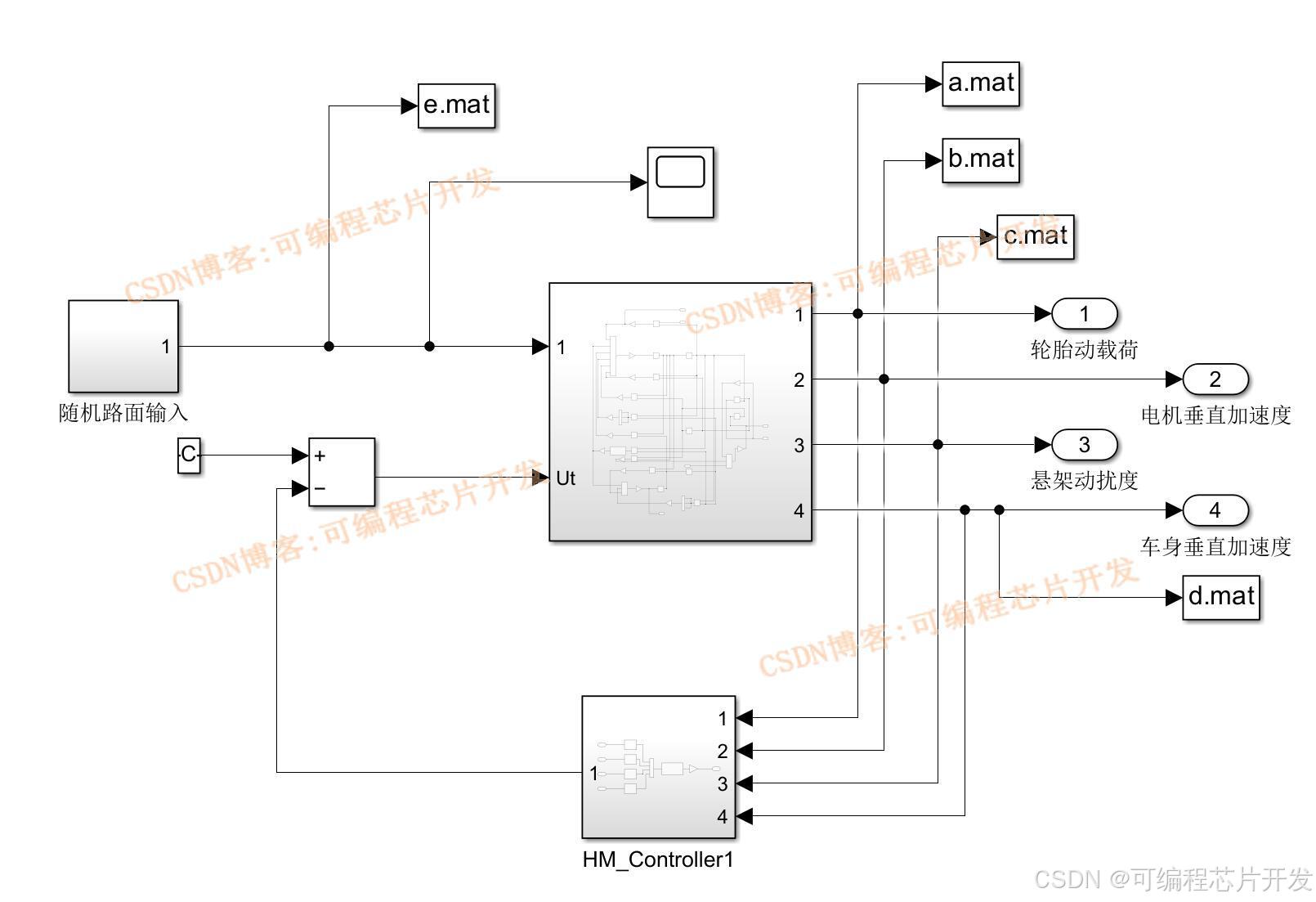
基于滑膜控制器的分数阶非线性悬架模型simulink建模与仿真。通过simulink搭建含分数阶的悬架非线性仿真模型。仿真分析轮胎动载荷的幅频特性,电机垂直加速度的幅频特性,悬架动扰度的幅频特性,车身垂直加速度的幅频特性。
2.系统仿真结果
3.核心程序与模型
版本:Matlab2024b(提供Matlab2024b软件下载链接)
4.系统原理简介
汽车悬架系统作为车辆的重要组成部分,其性能对车辆的行驶平顺性、操纵稳定性以及乘坐舒适性起着关键作用。传统的整数阶线性悬架模型虽然在一定程度上能够描述悬架系统的动态特性,但在处理复杂的非线性因素时存在局限性。分数阶微积分理论的引入为更精确地描述悬架系统的力学特性提供了新的途径,分数阶非线性悬架模型能够更准确地反映悬架系统中的黏弹性、滞回等非线性现象。滑模控制作为一种具有较强鲁棒性的控制方法,能够有效地应对系统中的不确定性和外部干扰。将滑模控制应用于分数阶非线性悬架模型,可以提高悬架系统的控制性能,使其在不同的行驶工况下都能保持良好的工作状态。本文将详细介绍基于滑膜控制器的分数阶非线性悬架模型的原理,包括分数阶微积分的基本概念、分数阶非线性悬架模型的建立、滑模控制器的设计以及系统的稳定性分析等内容。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号