基于双PI+EKF扩展卡尔曼滤波的PMSM速度控制simulink建模与仿真
1.课题概述
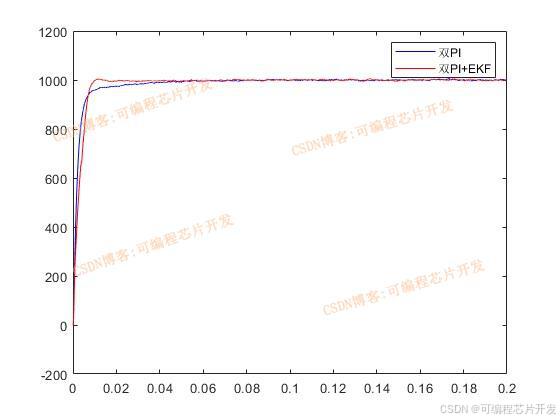
基于双PI+EKF扩展卡尔曼滤波的PMSM速度控制simulink建模与仿真。对比基于双PI的扩展卡尔曼滤波的PMSM速度控制系统。对比其电机转速的收敛性。
2.系统仿真结果
(完整程序运行后无水印)
对比结果如下图所示:
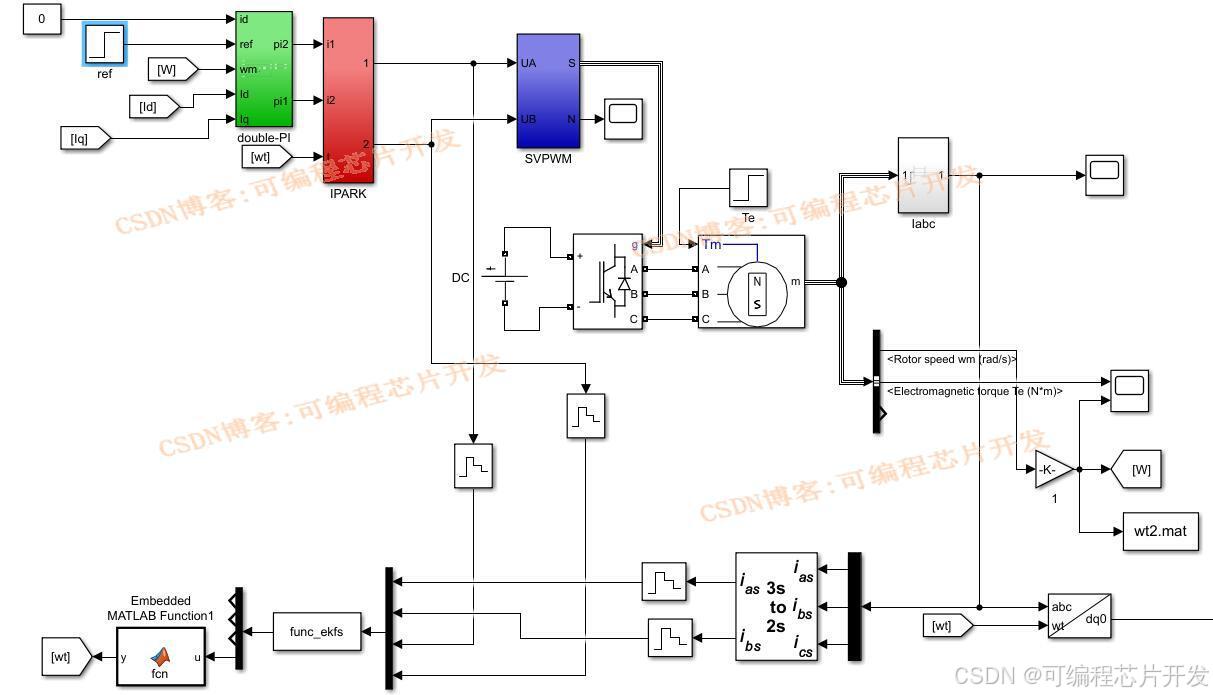
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
PMSM因其高效率、高功率密度和良好的动态响应特性而被广泛应用于工业自动化领域。然而,由于电机参数的变化、负载扰动等因素,实现精确的速度控制是一项挑战。
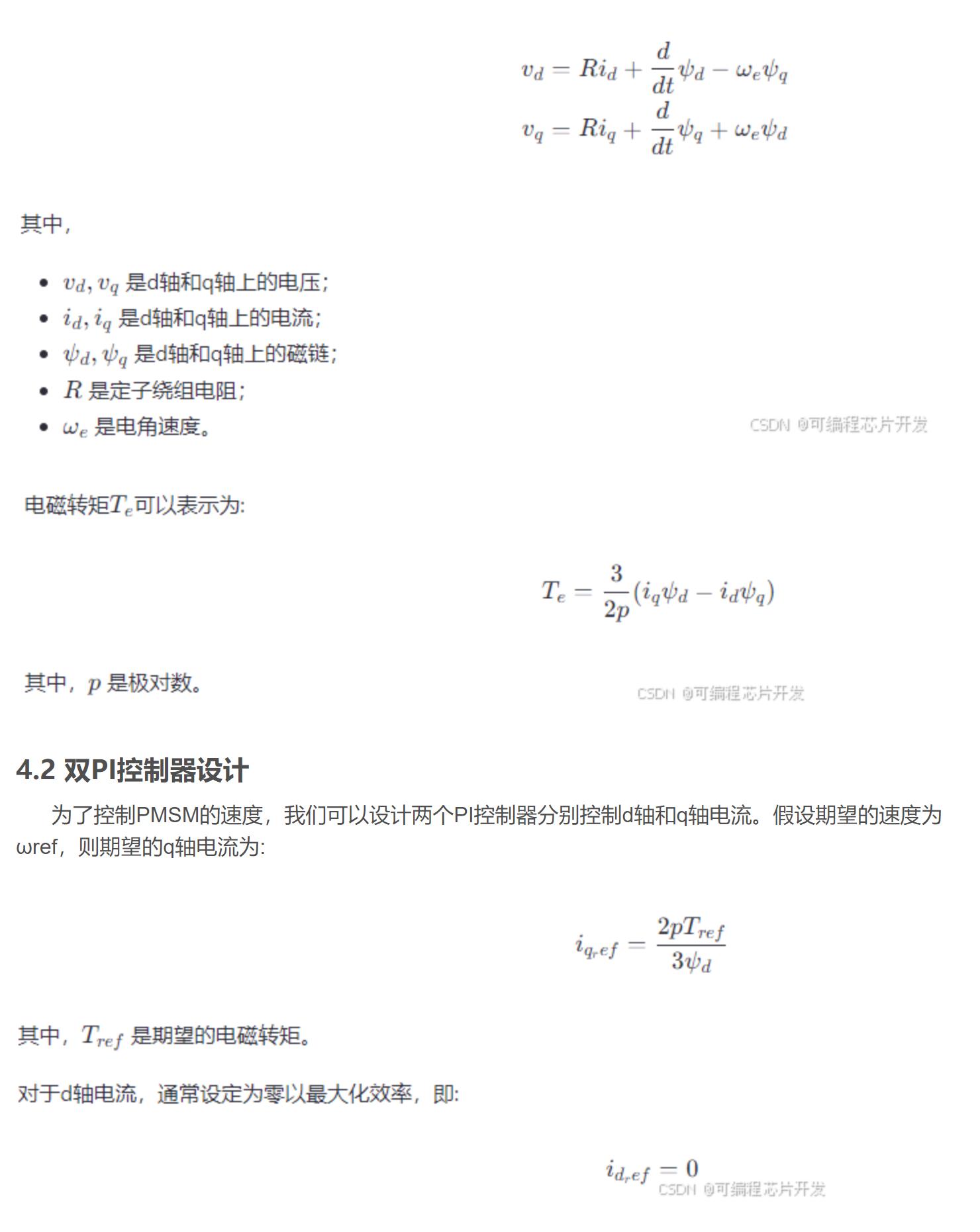
4.1 PMSM数学模型
首先,我们建立PMSM的数学模型。在d-q旋转坐标系下,PMSM的电压方程可以表示为:
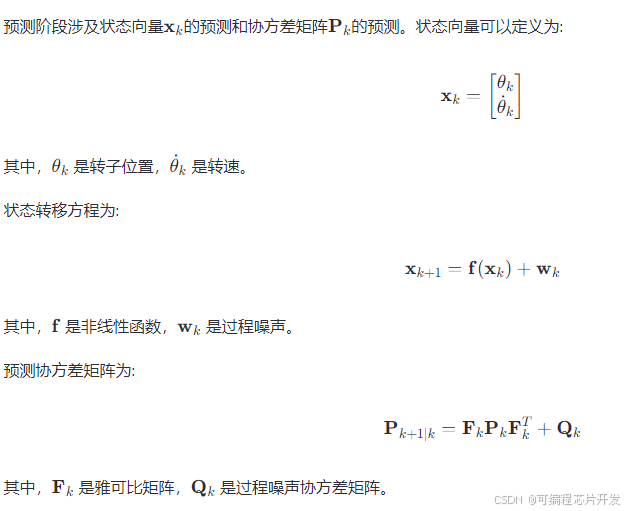
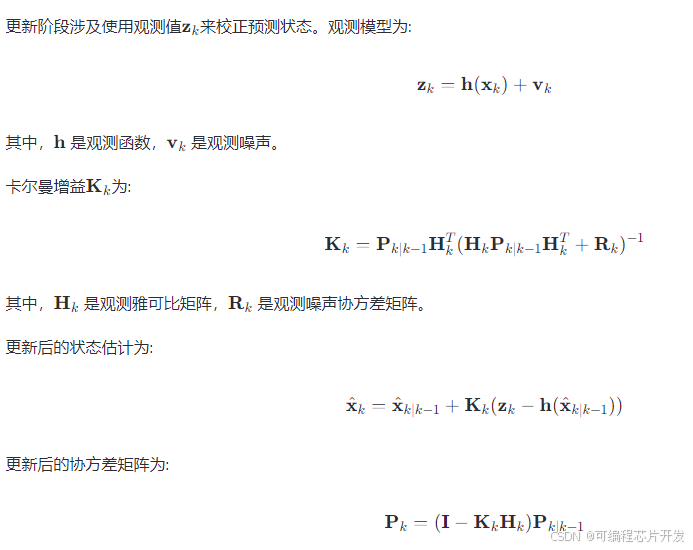
4.3 扩展卡尔曼滤波器(EKF)
扩展卡尔曼滤波器是一种非线性状态估计器,它可以用来估计PMSM的状态变量,例如转子位置θ和转速ω。EKF的基本步骤包括预测和更新阶段。
4.4 控制系统实现
电流控制环路由两个PI控制器组成,它们分别控制d轴和q轴电流。控制器输出的电压参考值为:
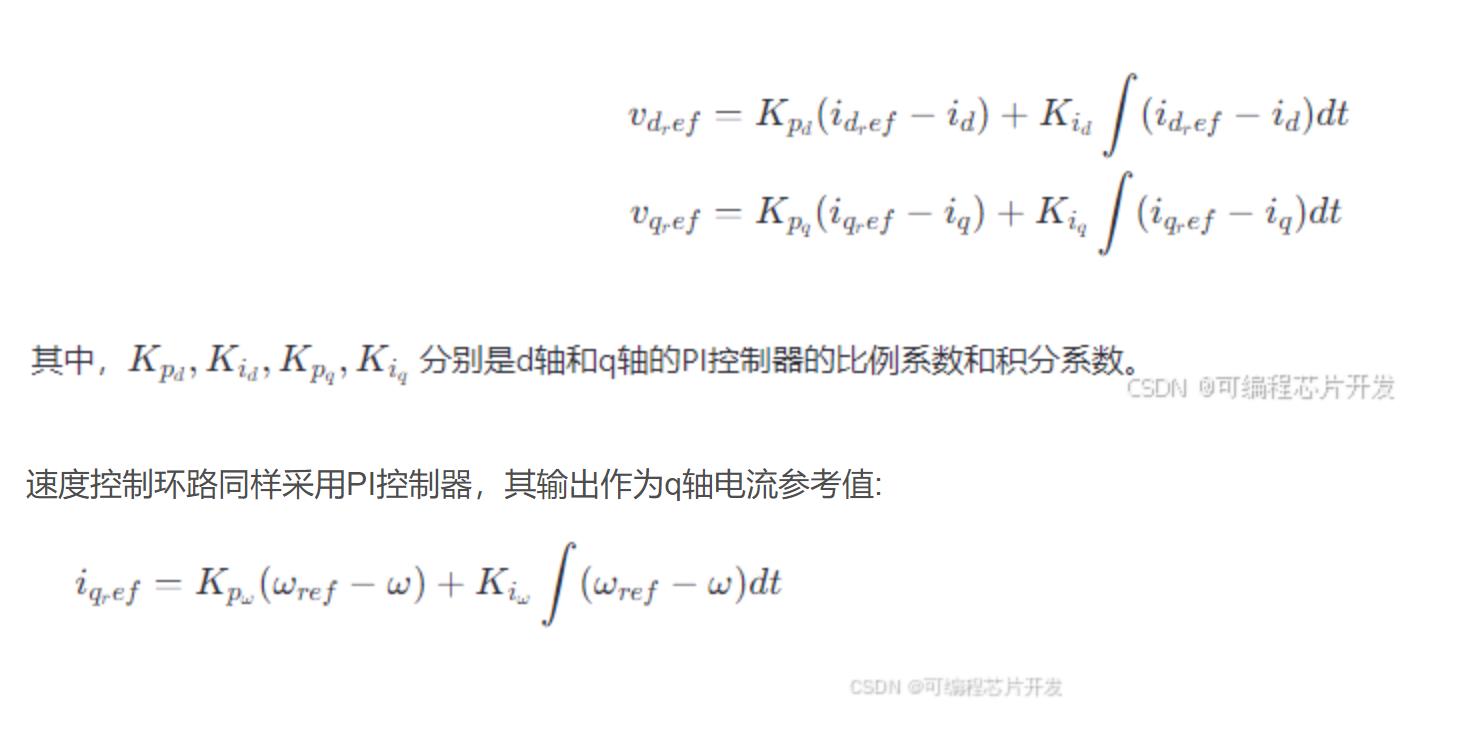
基于双PI控制器与扩展卡尔曼滤波器的PMSM速度控制系统的设计原理。通过合理选择控制器参数和滤波器参数,可以显著提高PMSM的速度控制性能。此外,EKF的加入有助于提高系统的鲁棒性和准确性,即使在存在参数不确定性和外部干扰的情况下也能保持良好的控制效果。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号