基于模糊PID控制器的puma560机器人控制系统的simulink建模与仿真
1.课题概述
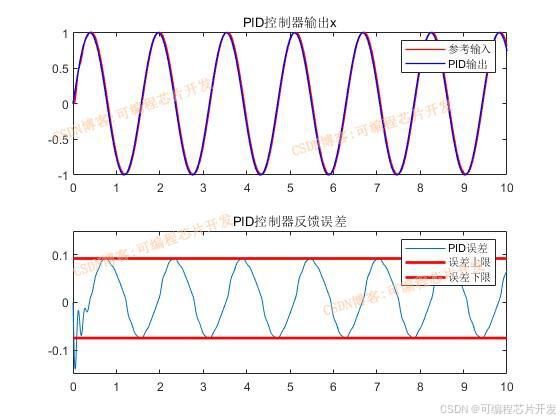
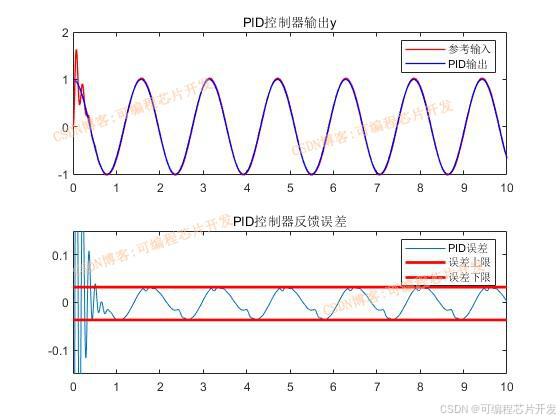
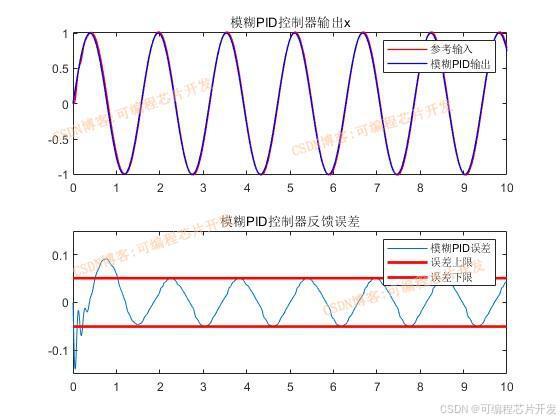
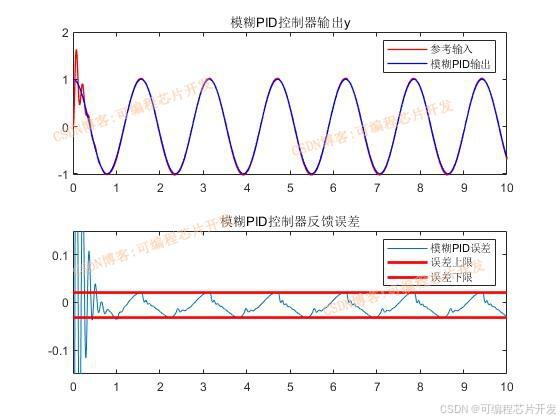
基于模糊PID控制器的puma560机器人控制系统的simulink建模与仿真,对比传统的PID控制器。分析两种控制器的控制误差。
2.系统仿真结果
(完整程序运行后无水印)
3.核心程序与模型
版本:MATLAB2022a
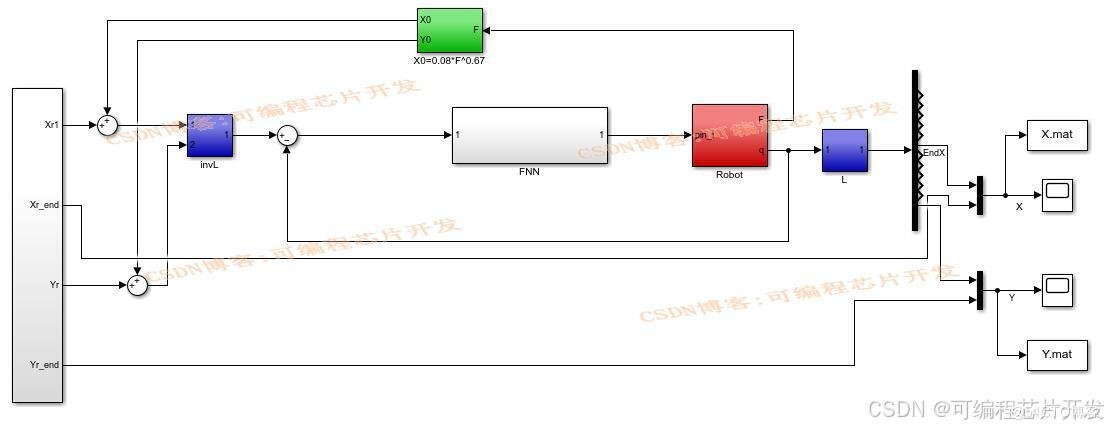
4.系统原理简介
基于模糊PID控制器的PUMA 560机器人控制系统是一种高级的控制策略,它结合了传统PID控制的优点和模糊逻辑的灵活性,以提高机器人的动态性能和抗干扰能力。
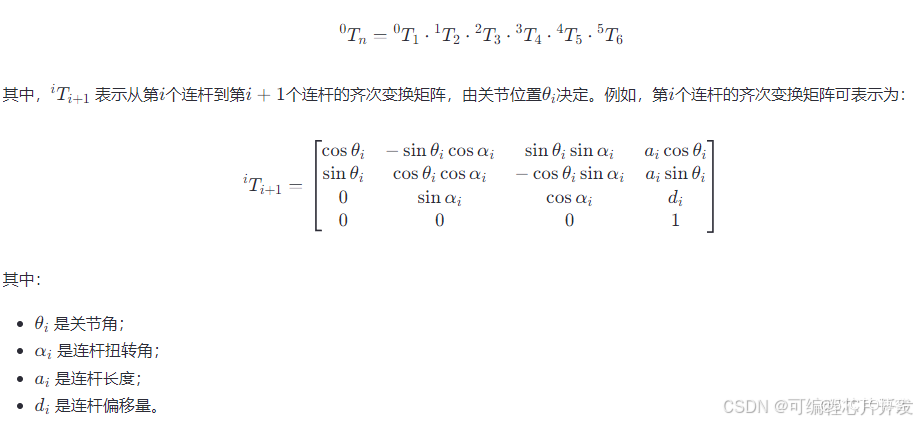
4.1 PUMA 560机器人的数学模型
PUMA 560是一种经典的6自由度工业机器人,它的运动学和动力学模型是研究机器人控制的基础。PUMA 560的正向运动学方程可以用齐次变换矩阵表示:
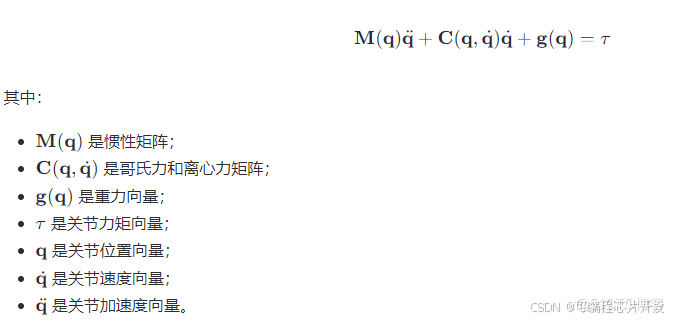
PUMA 560的动力学方程可以用拉格朗日方程表示为:
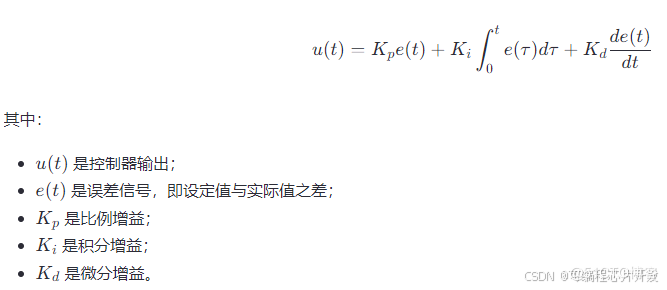
4.2 PID控制原理
传统的PID控制器是一种线性控制器,广泛应用于各种控制场合。PID控制器的输出可表示为:
4.3 模糊PID控制器的设计
模糊PID控制器结合了PID控制和模糊逻辑的优点。模糊PID控制器的主要组成部分包括:
模糊化接口:将误差e(t)和误差变化率de/dt模糊化。
模糊规则库:定义一系列模糊规则,如“如果误差大且误差变化率为正,则增加比例增益”。
模糊推理:使用模糊逻辑运算符(如最小、最大)对模糊规则进行推理。
清晰化接口:将模糊输出去模糊化得到PID控制器的参数调整值。
对于PUMA 560的每个关节,可以设计一个模糊PID控制器,以提高控制性能。控制器设计步骤如下:
选择输入变量:选择关节位置误差e和误差变化率de/dt作为输入。
定义模糊集合:为输入变量定义模糊集合。
制定模糊规则:根据机器人动态特性制定模糊规则。
设计模糊推理系统:使用模糊逻辑进行推理。
去模糊化:将模糊输出转换为清晰的PID参数调整值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号