基于MPC在线优化的有效集法位置控制器simulink建模与仿真
1.课题概述
模型预测控制是一种基于模型的优化控制方法,它利用过程模型预测未来行为,并通过求解一个优化问题来确定最优控制序列。MPC的特点在于它能够处理系统的动态特性、输入输出约束,并且可以考虑预测模型的不确定性。在本课题中,将通过simulink实现基于MPC在线优化的有效集法位置控制器建模与仿真,并对比RCNC控制器。
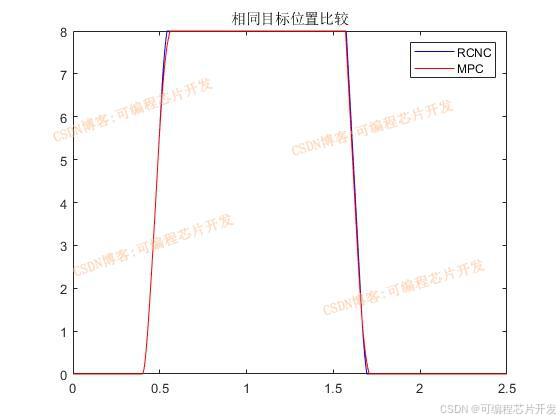
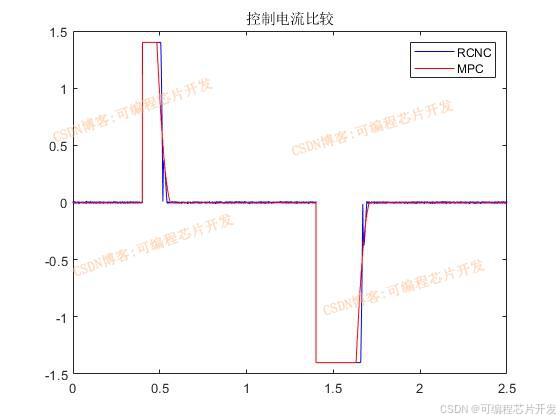
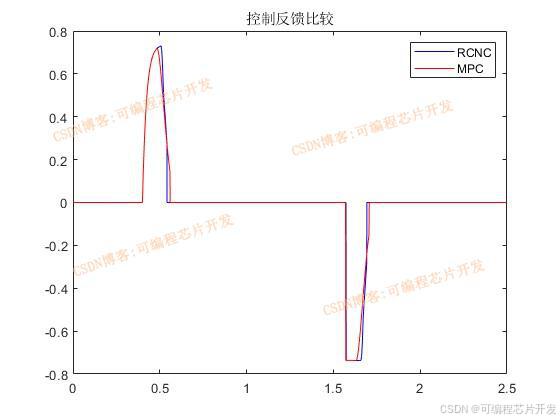
2.系统仿真结果
(完整程序运行后无水印)
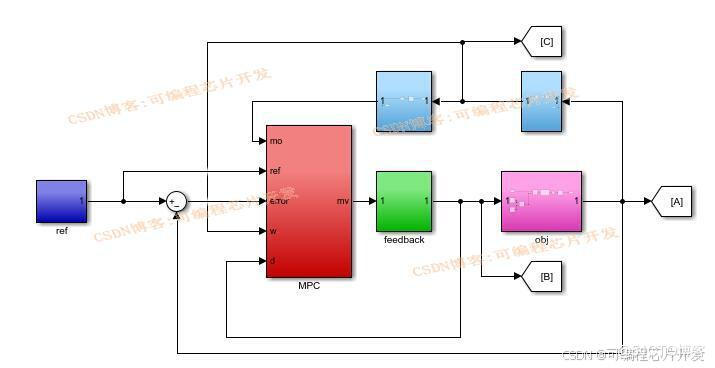
3.核心程序与模型
版本:MATLAB2022a
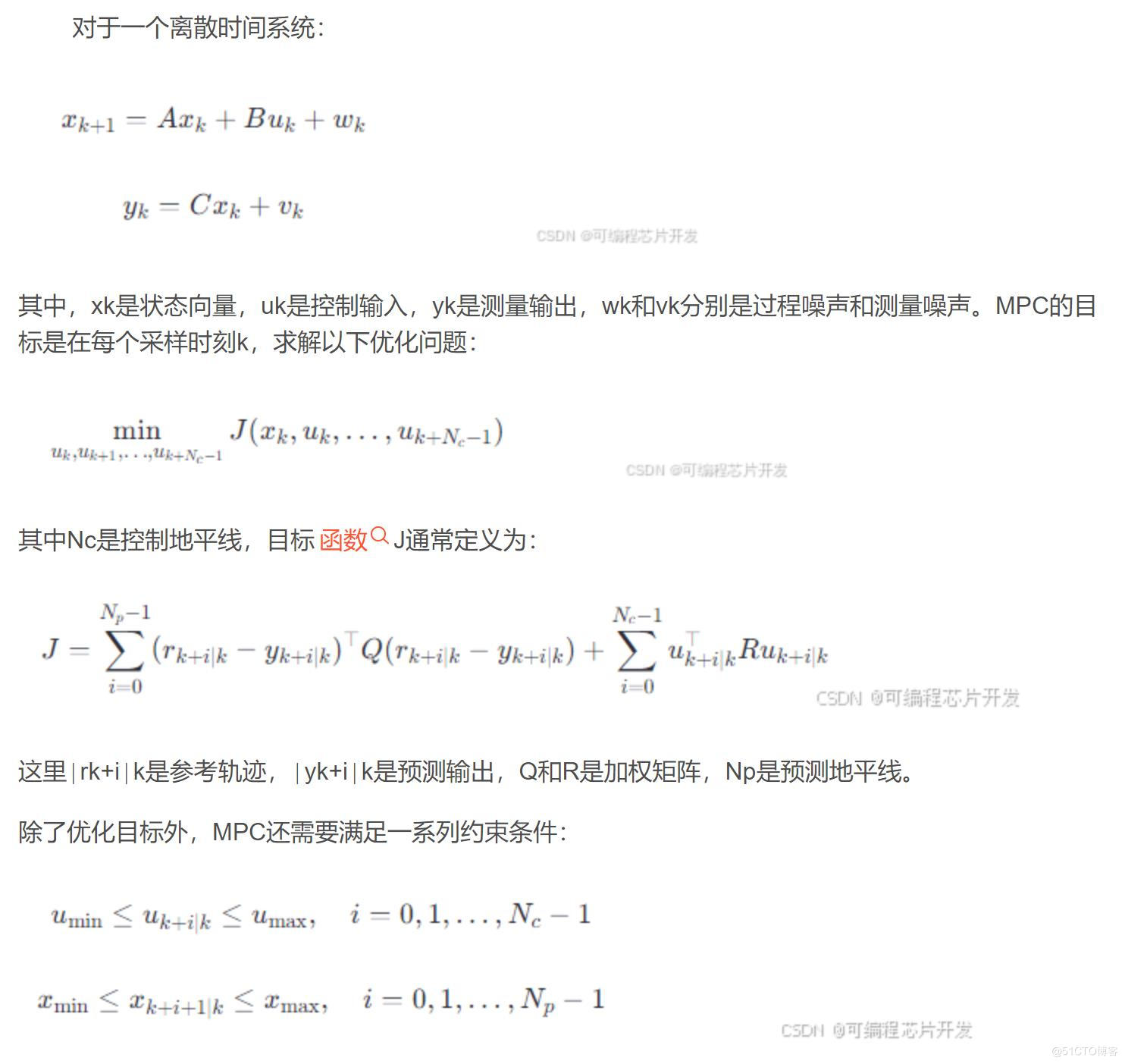
4.系统原理简介
模型预测控制是一种基于模型的优化控制方法,它利用过程模型预测未来行为,并通过求解一个优化问题来确定最优控制序列。MPC的特点在于它能够处理系统的动态特性、输入输出约束,并且可以考虑预测模型的不确定性。
有效集法是一种求解具有简单约束的优化问题的方法,它特别适用于MPC中带有输入和状态约束的问题。该方法通过逐步更新约束集合(即所谓的“活动集”),从而找到满足所有约束条件的最优解。
算法步骤如下所示:
初始化:选择一个可行点作为初始解,所有不等式约束被视为非活动的。
确定搜索方向:求解一个子问题,得到一个搜索方向d。
计算步长:确定沿着d的方向移动的距离,以保持所有约束的满足。
更新活动集:检查是否达到某个约束边界,如果是,则将其加入活动集;如果离开某个约束边界,则将其从活动集中移除。
更新解:根据步长和搜索方向更新解。
终止准则:如果满足某些终止准则,则停止;否则返回第二步。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号