基于FOC控制器的BLDC无刷直流电机控制系统matlab编程与仿真
1.课题概述
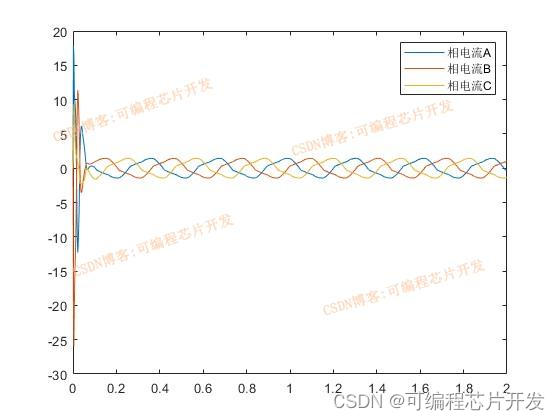
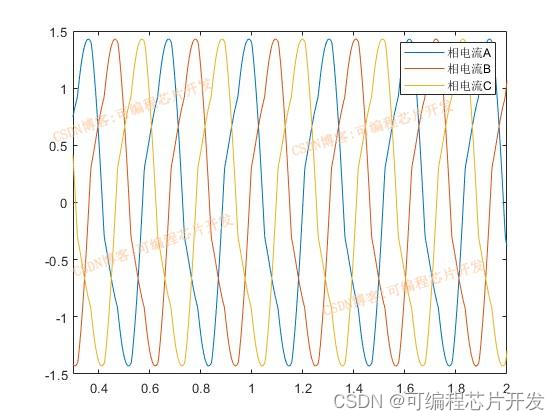
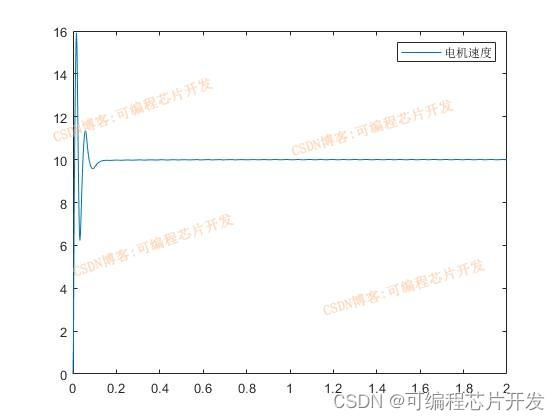
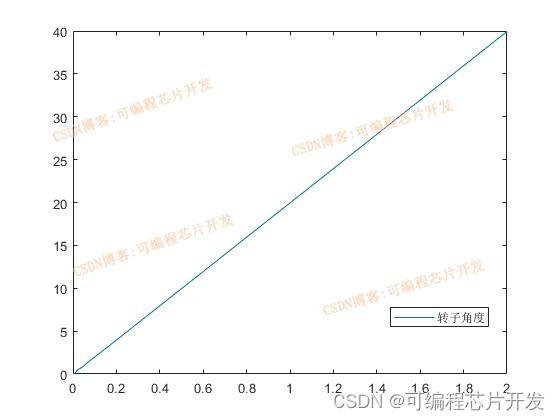
基于FOC控制器的BLDC无刷直流电机控制系统matlab编程与仿真,使用MATLAB编程实现,包括FOC控制器,clark,park等,不使用simulink建模。仿真输出三相电流,电机转速以及转子角度。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
%矢场定向控制 function [A,B,C] = func_foc_controller(a,b,c,theta,q_ref) % 为了与q轴对齐进行相位校正 theta = theta - pi/2; % 计算cos(theta) yc = cos(theta); % 计算sin(theta) ys = sin(theta); %克拉克变换abc to alpha beta [alpha,beta] = func_clark(a,b,c); % Clark到Park变换 - αβ到dq坐标系 [d,q] = func_clark2park(alpha,beta,yc,ys); %磁通量调节器 d = 0-d; q = q_ref-q; %Park变换回到Clarke变换 - dq到αβ [alpha,beta] = func_park2clark(d,q,yc,ys); % 输出ABC A = alpha; B = - alpha*0.5 + 0.8661*beta; C = - alpha*0.5 - 0.8661*beta; end
4.系统原理简介
基于磁场定向控制(Field-Oriented Control, FOC)的无刷直流电机(BLDC)控制系统是一种高级控制策略,旨在实现电机的高效、平滑运行以及高动态响应。FOC的核心思想是将电机的三相交流电流分解到两个正交的坐标系中,分别对应电机的励磁(d轴)和转矩(q轴),通过独立控制这两个轴上的电流来精确控制电机的磁场和输出转矩。
在FOC中,首先通过坐标变换将三相定子电流从三相静止坐标系(αβ)转换到两相旋转坐标系(dq)。这种转换基于克拉克(Clarke)变换和帕克(Park)变换,目的是分离出影响磁场和转矩的电流分量。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号