基于包围盒的机械臂防碰撞算法matlab仿真
1.课题概述
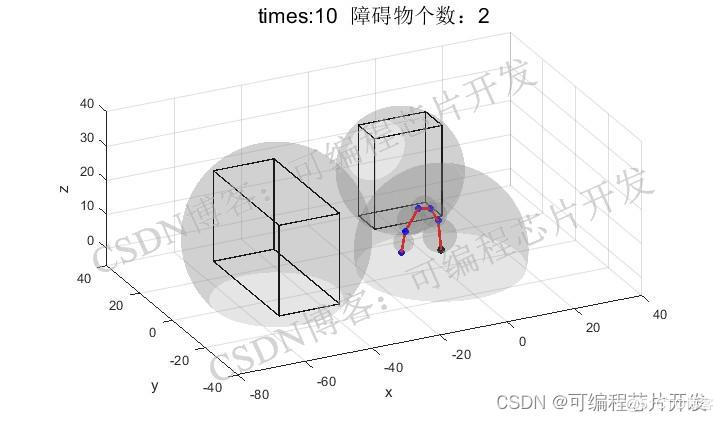
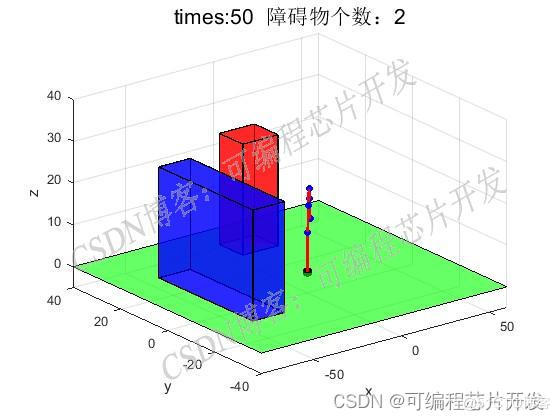
基于包围盒的机械臂防碰撞算法。在实际情况中,由于很多对象结构较为复杂,当目标对象与障碍物之间的包围盒相交的时候,而两个物体并不相交。这就需要进一步划分目标对象,对每个划分的目标对象各个部分加入包围盒,并以此检测是否和障碍物的包围盒相交,直到找到相交部分。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
%臂架一级包围球
[Rs1,xs1,ys1,zs1] = func_big2(T);
grid on;
axis([-80 40 -40 40 -5 40]);
NAME = ['times:',num2str(j),' 障碍物个数:',num2str(SHOW)];
title(NAME,'fontsize',16);
xlabel('x');
ylabel('y');
zlabel('z');
view([-26,24]);
drawnow;
hold off;
%判断是否香蕉
%包围盒和一级包围盒判断
d1 = sqrt((x1-xs1)^2 + (y1-ys1)^2 + (z1-zs1)^2);
d2 = R1 + Rs1;
if d1 > d2%不香蕉
disp('不相交');
else
%判断二级包围盒
for i=1:p-1
tmps = sqrt((x1-xs2(i))^2 + (y1-ys2(i))^2 + (z1-zs2(i))^2);
d3(i)= tmps;
end
[d4,I] = min(d3);
d5 = rs2(I) + R1;
if d4 > d5%不香蕉
disp('不相交');
else
%计算点到面的距离
dx = abs(X(I)-G1(1));
if dx >= 10;%dsafe = 10;安全距离
disp('不相交');
else
disp('可能出现碰撞');
end
end
end
end
4.系统原理简介
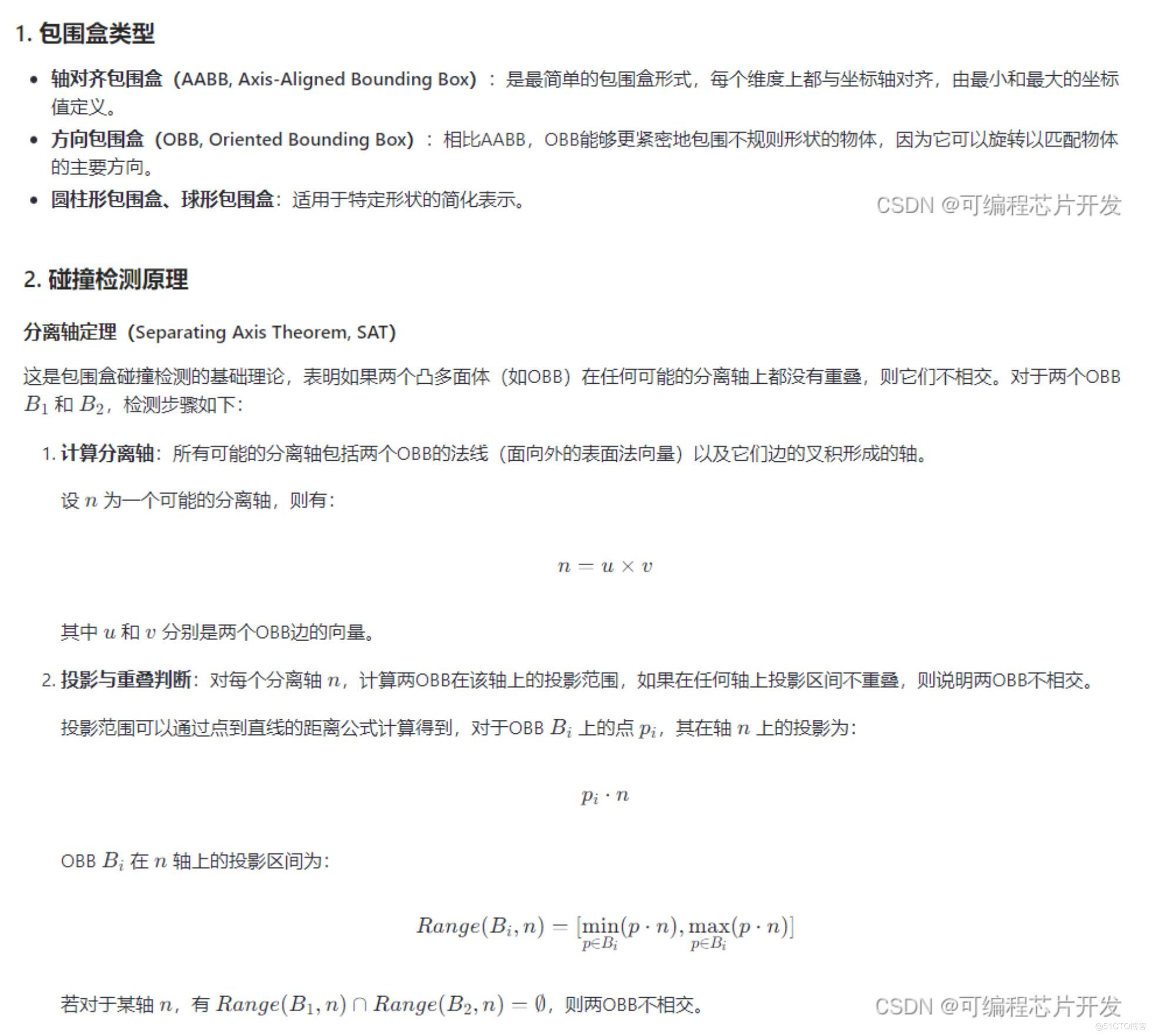
基于包围盒的机械臂防碰撞算法是一种广泛应用在机器人运动规划与控制领域的策略,旨在通过预判机械臂及其末端执行器与其他物体或环境之间的潜在碰撞风险,确保操作安全。这类算法的核心在于构建一种或多种类型的包围盒(Bounding Box)来近似表示机械臂及其环境中各实体的占用空间,并通过高效的数学方法检测这些包围盒之间是否发生交集,进而提前采取规避措施。
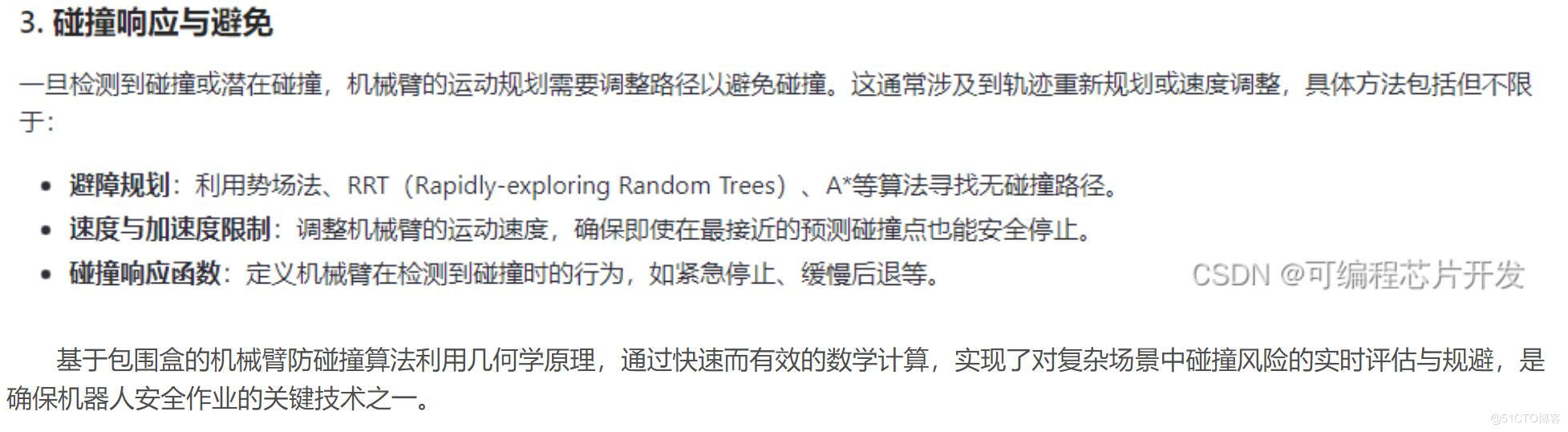
基于包围盒的机械臂防碰撞算法利用几何学原理,通过快速而有效的数学计算,实现了对复杂场景中碰撞风险的实时评估与规避,是确保机器人安全作业的关键技术之一。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号