动态规划总结【分类2-DP优化】
动态规划总结【分类2-DP优化】
1 状态压缩
状态压缩,是从状态的表示入手的。在这样的问题中,我们常常可以抽象出一个表示答案必须的内容:一个数组,表示是否走过/当前状态。通常这种数据都只有两种类型。这个时候,就可以看看数据范围,判断是否使用状态压缩。
所以状态压缩省空间,主要是因为本来就没必要开那么多,省时间是因为它把原来需要O(N)
遍历的数组转化成可以O(1)计算的位运算
2 倍增优化
这个ST算法,可以说就是一种倍增优化DP
倍增优化主要是利用2的次幂的性质,把原来需要一个一个推的状态表示成2的次幂,这样提升了运算速度。
然后要求答案的时候再把数据拿出来拼合成答案就成了。这种操作一般都比较少,比如求答案只求一次,要不然也不能起到很好的优化效果。
要使用这种优化,状态的转移必须是连续的、整数域上的、递推式的
3 数据结构优化
除了可以对状态表示执行优化,我们还要考虑如何快速计算转移方程。
就比如你发现有的方程要你快速求前缀和、求区间和等等,那么可以尝试用树状数组线段树。
不过还有一种策略,就是直接把转移方程放到数据结构上来运行。这样也实现了快速找到决策的目的。
4 单调队列优化
4.1 一般的单调队列优化
单调队列,就是一种根据决策集合的单调性,及时排除无用的决策。
记得有个博客总结的很好:“假如有的选手比你小还比你强,那么你就可以退役了”。
这句看似调侃,实际上摆明了单调队列优化的核心逻辑,如果某个决策集合取值范围单调滑动(滑动窗口),决策点显然越“靠前”就可以存活更长时间,如果这样的点比靠后的节点更新还要优,那么靠后的决策就是没有用的,因为它已经不可能再取代靠前决策的地位。(无论从最优性还是合法性)
听起来不错,但是这里面有坑,你有的时候发现:你把还有用的决策踢出去了/下一个阶段你队列里的决策就不优了
这就是因为,你的这个问题可能并没有单调性,就是总结为书上最后那个1D/1D
简单来说,要能使用单调队列优化,你的状态转移方程需要满足:
-
决策集合取值范围两边变化单调性一致,要是一次函数(不一致就没必要用单调队列了,一个变量或者是一个不增加决策的队列都行)
-
中间转移求最值的那个多项式函数val要可以被分成只跟决策变量j有关和只跟状态变量i有关的
我们这个优化是把决策过程省掉了,那么这样做要保证在状态变化的时候较优的决策仍然较优,那么如果含有ij交叉项,那么i变化的时候就不敢保证这一交叉项的值不会影响val的整体最优性。就比如减去了一个ij,那么val函数图像就会变成弯曲的,有的时候一移动i原来的大小关系就被打乱了
例子:
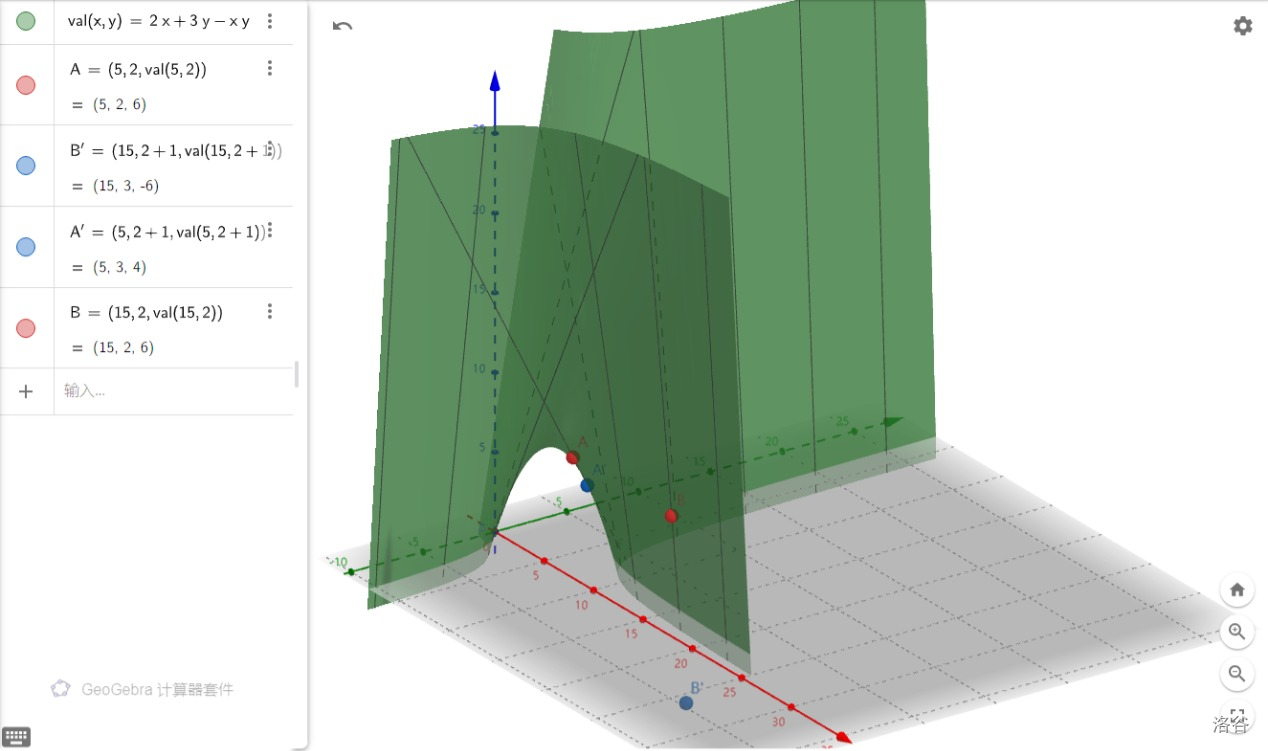
图注:由图中A->A',B->B’。(红色到蓝色)
4.2 单调队列优化多重背包
单调队列优化多重背包,就是将状态按除以Vi的余数分组,然后写出新的方程,然后按照方程执行计算。
这里主要说一下总结,那就是如果想要使用单调队列优化,不仅需要满足以上要求,还需要决策集合是高度重复的,然后每当状态改变时我们都要能够快速求到新的集合。
5 环形与后效性处理
5.1 环形处理
分为两种:
-
进行两次DP,第二次强制从第一次漏掉的状态开始转移。
-
破环成链法,复制一份接在末尾。使得每N个都对应原来的一种展开。
5.2 后效性处理
如果某一个问题有后效性,我们可以用高斯消元的方法直接求解转移方程。
通常这种题不会让你求最值的,因为有可能解出来inf,就跟SPFA遇上负环一样(本来就一样嘛)。多半求数学期望,也不可能求方案数,要不然也是inf,所以你可以去直接解它。
本文来自博客园,作者:haozexu,转载请注明原文链接:https://www.cnblogs.com/haozexu/p/18281764

 浙公网安备 33010602011771号
浙公网安备 33010602011771号