

基于开源模型搭建实时人脸识别系统(二):人脸检测概览与模型选型
续 基于开源模型的实时人脸识别系统
进行人脸识别首要的任务就是要定位出画面中的人脸,这个任务就是人脸检测。人脸检测总体上算是目标检测的一个特殊情况,但也有自身的特点,比如角度多变,表情多变,可能存在各类遮挡。早期传统的方法有Haar Cascade、HOG等,基本做法就是特征描述子+滑窗+分类器,随着2012年Alexnet的出现,慢慢深度学习在这一领域开始崛起。算法和硬件性能的发展,也让基于深度学习的人脸识别不仅性能取得了很大的提升,速度也能达到实时,使得人脸技术真正进入了实用。
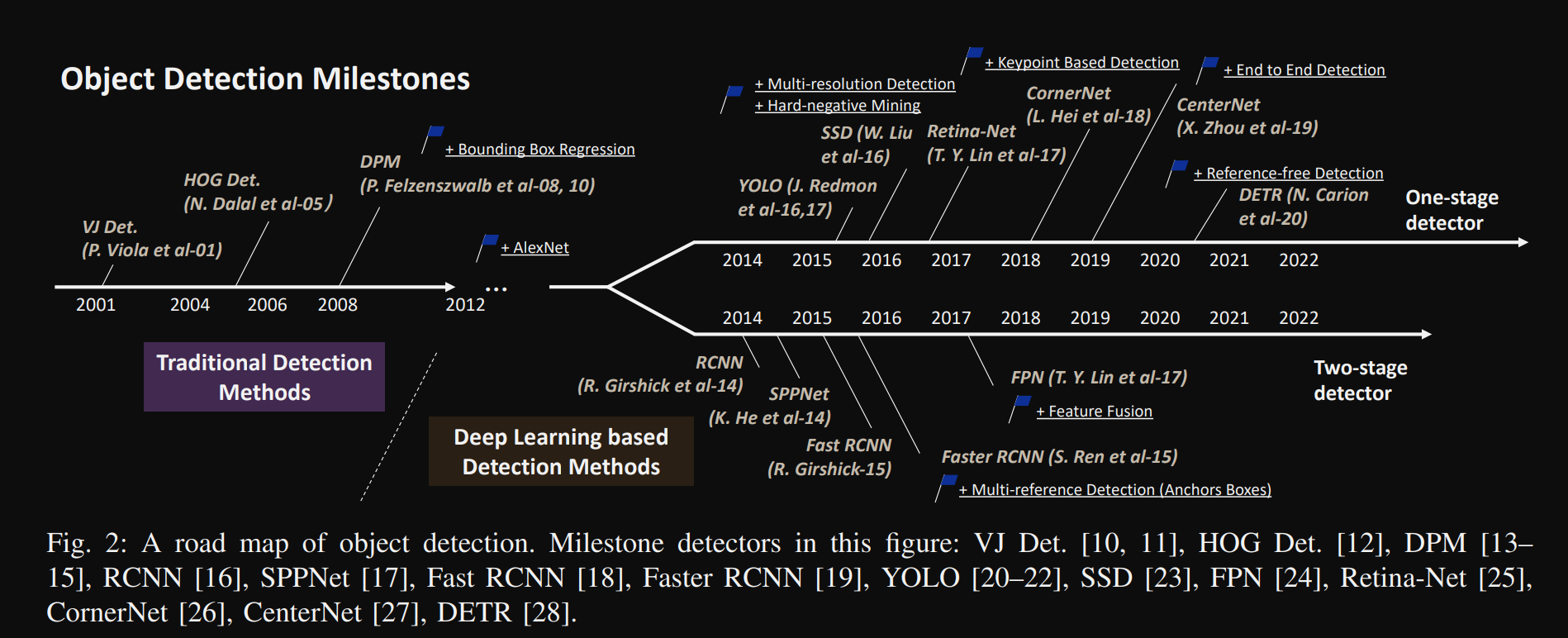
人脸检测大体上跟随目标检测技术的发展,不过也有些自己的方法,主要可以分为一下几类方法.
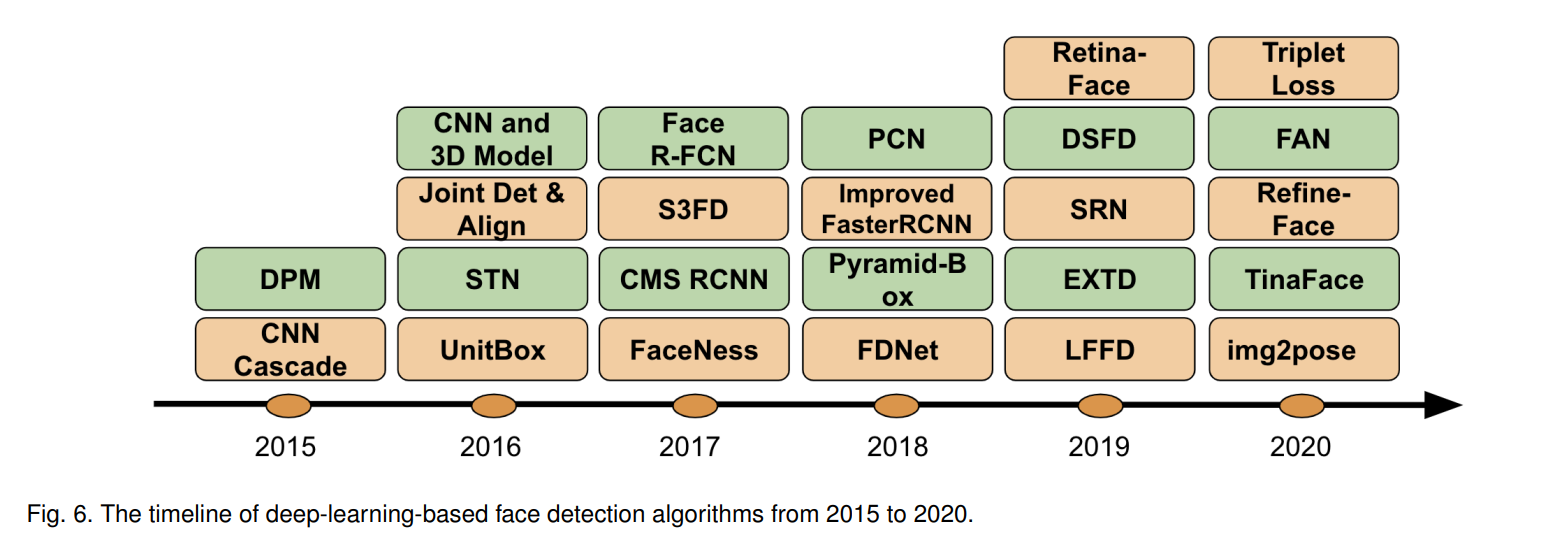
人脸检测算法概览
由于这个系列重点并不在于算法细节本身,因而对于一些算法只是提及,有兴趣可以自己精读。
Cascade-CNN Based Models
这类方法通过级联几个网络来逐步提高准确率,比较有代表性的是MTCNN方法。
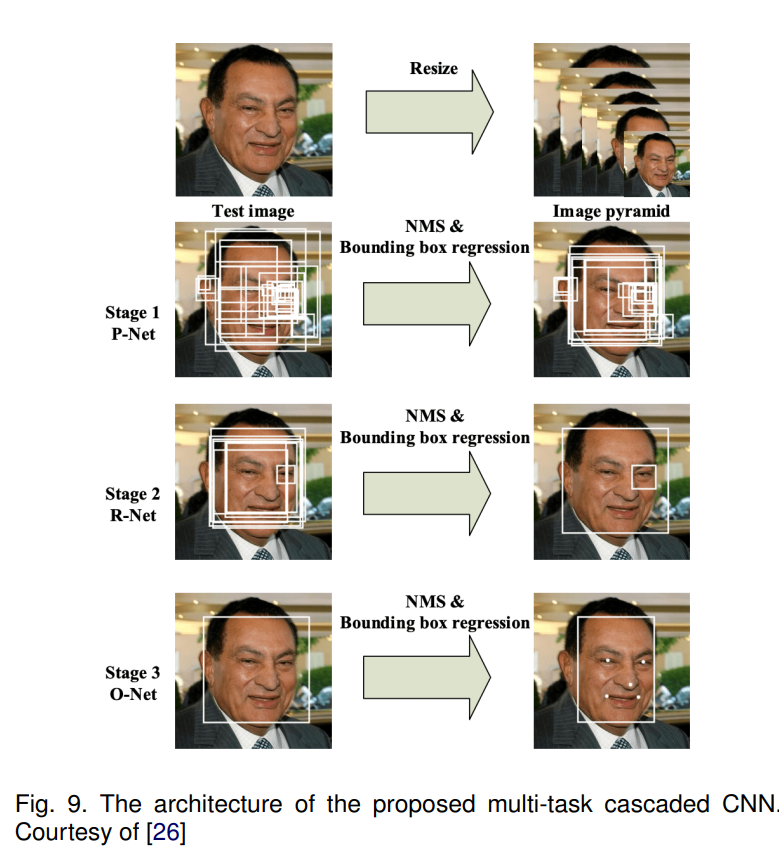
MTCNN通过级联PNet, RNet, ONet,层层过滤来提高整个检测的精度。这个方法更适合CPU,那个时期的嵌入式设备使用比较多。 由于有3个网络,训练起来比较麻烦。
R-CNN
这一块主要来源于目标检测中的RCNN, Fast RCNN, Faster RCNN
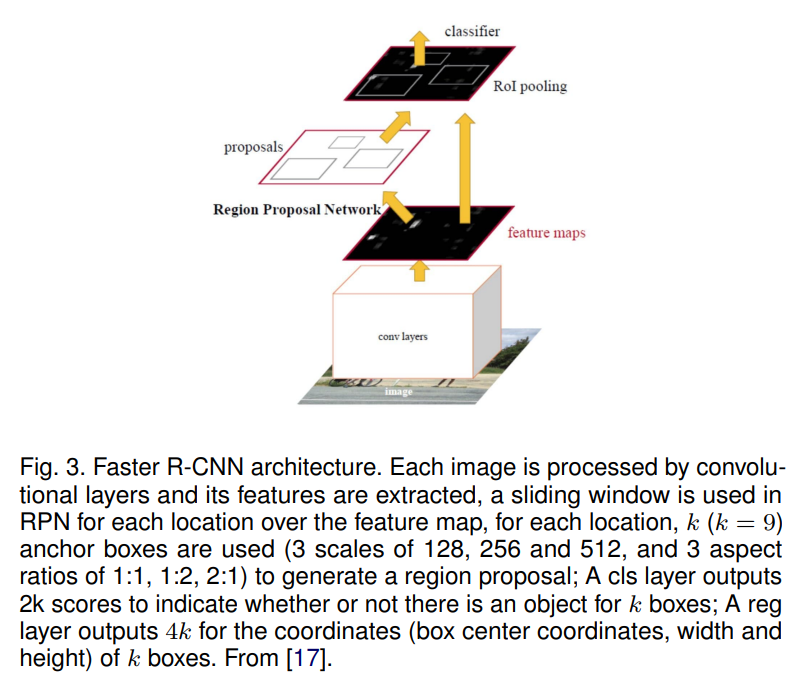
这类方法精度高,但速度相对较慢。
Single Shot Detection Models
SSD是目标检测领域比较有代表性的一个算法,与RCNN系列相比,它是one stage方法,速度比较快。基于它的用于人脸检测的代表性方法是SSH.
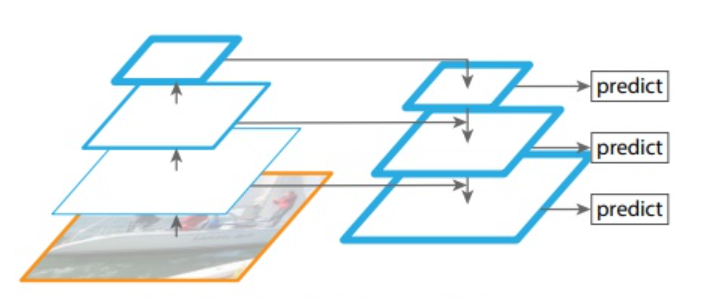
Feature Pyramid Network Based Models
YOLO系列
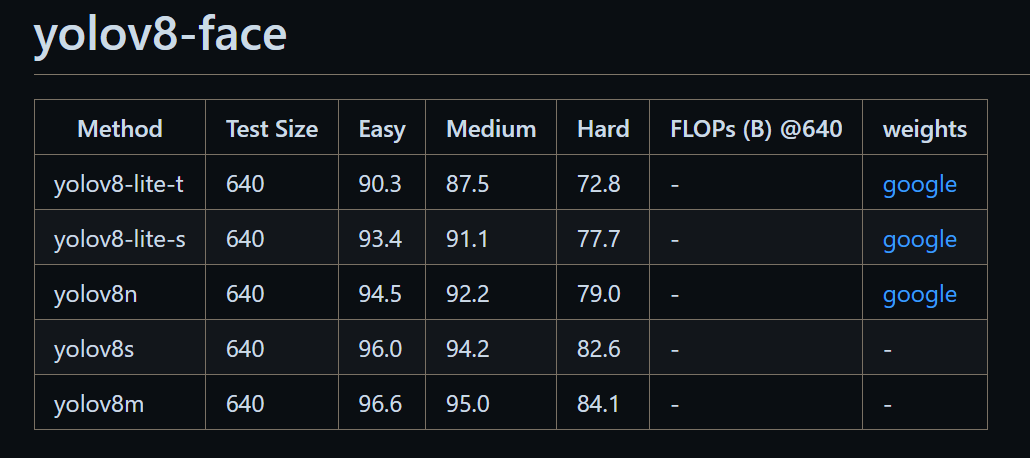
YOLO系列在目标检测领域比较成功,自然的也会用在人脸检测领域,比如tiny yolo face,yolov5face, yolov8face等,基本上每一代都会应用于人脸。
开源模型的选型
为了能够达到实时,同时也要有较好的效果,我们将目光锁定在yolo系列上,yolo在精度和速度的平衡上做的比较好,也比较易用。目前最新的是yolov8, 经过搜索,也已经有人将其用在人脸检测上了:derronqi/yolov8-face: yolov8 face detection with landmark (github.com),
推理框架的选择
简单起见,我们选择onnxruntime,该框架既支持CPU也支持GPU, 基本满足了我们的开发要求。
yolov8-face的使用
为了减少重复工作,我们可以定义一个模型的基类, 对模型载入、推理的操作进行封装,这样就不需要每个模型都实现一遍了:
from easydict import EasyDict as edict
import onnxruntime
import threading
class BaseModel:
def __init__(self, model_path, device='cpu', **kwargs) -> None:
self.model = self.load_model(model_path, device)
self.input_layer = self.model.get_inputs()[0].name
self.output_layers = [output.name for output in self.model.get_outputs()]
self.lock = threading.Lock()
def load_model(self, model_path:str, device:str='cpu'):
available_providers = onnxruntime.get_available_providers()
if device == "gpu" and "CUDAExecutionProvider" not in available_providers:
print("CUDAExecutionProvider is not available, use CPUExecutionProvider instead")
device = "cpu"
if device == 'cpu':
self.model = onnxruntime.InferenceSession(model_path, providers=['CPUExecutionProvider'])
else:
self.model = onnxruntime.InferenceSession(model_path,providers=['CUDAExecutionProvider'])
return self.model
def inference(self, input):
with self.lock:
outputs = self.model.run(self.output_layers, {self.input_layer: input})
return outputs
def preprocess(self, **kwargs):
pass
def postprocess(self, **kwargs):
pass
def run(self, **kwargs):
pass
继承BaseModel, 实现模型的前处理和后处理:
class Yolov8Face(BaseModel):
def __init__(self, model_path, device='cpu',**kwargs) -> None:
super().__init__(model_path, device, **kwargs)
self.conf_threshold = kwargs.get('conf_threshold', 0.5)
self.iou_threshold = kwargs.get('iou_threshold', 0.4)
self.input_size = kwargs.get('input_size', 640)
self.input_width, self.input_height = self.input_size, self.input_size
self.reg_max=16
self.project = np.arange(self.reg_max)
self.strides=[8, 16, 32]
self.feats_hw = [(math.ceil(self.input_height / self.strides[i]), math.ceil(self.input_width / self.strides[i])) for i in range(len(self.strides))]
self.anchors = self.make_anchors(self.feats_hw)
def make_anchors(self, feats_hw, grid_cell_offset=0.5):
"""Generate anchors from features."""
anchor_points = {}
for i, stride in enumerate(self.strides):
h,w = feats_hw[i]
x = np.arange(0, w) + grid_cell_offset # shift x
y = np.arange(0, h) + grid_cell_offset # shift y
sx, sy = np.meshgrid(x, y)
# sy, sx = np.meshgrid(y, x)
anchor_points[stride] = np.stack((sx, sy), axis=-1).reshape(-1, 2)
return anchor_points
def preprocess(self, image, **kwargs):
return resize_image(image, keep_ratio=True, dst_width=self.input_width, dst_height=self.input_height)
def distance2bbox(self, points, distance, max_shape=None):
x1 = points[:, 0] - distance[:, 0]
y1 = points[:, 1] - distance[:, 1]
x2 = points[:, 0] + distance[:, 2]
y2 = points[:, 1] + distance[:, 3]
if max_shape is not None:
x1 = np.clip(x1, 0, max_shape[1])
y1 = np.clip(y1, 0, max_shape[0])
x2 = np.clip(x2, 0, max_shape[1])
y2 = np.clip(y2, 0, max_shape[0])
return np.stack([x1, y1, x2, y2], axis=-1)
def postprocess(self, preds, scale_h, scale_w, top, left, **kwargs):
bboxes, scores, landmarks = [], [], []
for i, pred in enumerate(preds):
stride = int(self.input_height/pred.shape[2])
pred = pred.transpose((0, 2, 3, 1))
box = pred[..., :self.reg_max * 4]
cls = 1 / (1 + np.exp(-pred[..., self.reg_max * 4:-15])).reshape((-1,1))
kpts = pred[..., -15:].reshape((-1,15)) ### x1,y1,score1, ..., x5,y5,score5
# tmp = box.reshape(self.feats_hw[i][0], self.feats_hw[i][1], 4, self.reg_max)
tmp = box.reshape(-1, 4, self.reg_max)
bbox_pred = softmax(tmp, axis=-1)
bbox_pred = np.dot(bbox_pred, self.project).reshape((-1,4))
bbox = self.distance2bbox(self.anchors[stride], bbox_pred, max_shape=(self.input_height, self.input_width)) * stride
kpts[:, 0::3] = (kpts[:, 0::3] * 2.0 + (self.anchors[stride][:, 0].reshape((-1,1)) - 0.5)) * stride
kpts[:, 1::3] = (kpts[:, 1::3] * 2.0 + (self.anchors[stride][:, 1].reshape((-1,1)) - 0.5)) * stride
kpts[:, 2::3] = 1 / (1+np.exp(-kpts[:, 2::3]))
bbox -= np.array([[left, top, left, top]]) ###合理使用广播法则
bbox *= np.array([[scale_w, scale_h, scale_w, scale_h]])
kpts -= np.tile(np.array([left, top, 0]), 5).reshape((1,15))
kpts *= np.tile(np.array([scale_w, scale_h, 1]), 5).reshape((1,15))
bboxes.append(bbox)
scores.append(cls)
landmarks.append(kpts)
bboxes = np.concatenate(bboxes, axis=0)
scores = np.concatenate(scores, axis=0)
landmarks = np.concatenate(landmarks, axis=0)
bboxes_wh = bboxes.copy()
bboxes_wh[:, 2:4] = bboxes[:, 2:4] - bboxes[:, 0:2] ####xywh
classIds = np.argmax(scores, axis=1)
confidences = np.max(scores, axis=1) ####max_class_confidence
mask = confidences>self.conf_threshold
bboxes_wh = bboxes_wh[mask] ###合理使用广播法则
confidences = confidences[mask]
classIds = classIds[mask]
landmarks = landmarks[mask]
if len(bboxes_wh) == 0:
return np.empty((0, 5)), np.empty((0, 5))
indices = cv2.dnn.NMSBoxes(bboxes_wh.tolist(), confidences.tolist(), self.conf_threshold,
self.iou_threshold).flatten()
if len(indices) > 0:
mlvl_bboxes = bboxes_wh[indices]
confidences = confidences[indices]
classIds = classIds[indices]
## convert box to x1,y1,x2,y2
mlvl_bboxes[:, 2:4] = mlvl_bboxes[:, 2:4] + mlvl_bboxes[:, 0:2]
# concat box, confidence, classId
mlvl_bboxes = np.concatenate((mlvl_bboxes, confidences.reshape(-1, 1), classIds.reshape(-1, 1)), axis=1)
landmarks = landmarks[indices]
return mlvl_bboxes, landmarks.reshape(-1, 5, 3)[..., :2]
else:
return np.empty((0, 5)), np.empty((0, 5))
def run(self, image, **kwargs):
img, newh, neww, top, left = self.preprocess(image)
scale_h, scale_w = image.shape[0]/newh, image.shape[1]/neww
# convert to RGB
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = img.astype(np.float32)
img = img / 255.0
img = np.transpose(img, (2, 0, 1))
img = np.expand_dims(img, axis=0)
output = self.inference(img)
bboxes, landmarks = self.postprocess(output, scale_h, scale_w, top, left)
# limit box in image
bboxes[:, 0] = np.clip(bboxes[:, 0], 0, image.shape[1])
bboxes[:, 1] = np.clip(bboxes[:, 1], 0, image.shape[0])
return bboxes, landmarks
测试
在Intel(R) Core(TM) i5-10210U上,yolov8-lite-t耗时50ms, 基本可以达到实时的需求。

参考文献:
ZOU, Zhengxia, et al. Object detection in 20 years: A survey. Proceedings of the IEEE, 2023.
MINAEE, Shervin, et al. Going deeper into face detection: A survey. arXiv preprint arXiv:2103.14983, 2021.
人脸识别系统源码
本文来自博客园,作者:CoderInCV,转载请注明原文链接:https://www.cnblogs.com/haoliuhust/p/17700867.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号