
结构光和TOF原理及优缺点对比说明
转载: https://zhuanlan.zhihu.com/p/51218791 TOF技术是什么,又和结构光有什么区别
转载:https://zhuanlan.zhihu.com/p/102806678
转载:http://www.oeinc.cn/post/113.html
一.概述
结构光(Structuredlight),通常采用特定波长的不可见的激光作为光源,它发射出来的光带有编码信息,投射在物体上,通过一定算法来计算返回的编码图案的畸变来得到物体的位置和深度信息,镜头需要定制镜头或者特殊镜头设计。
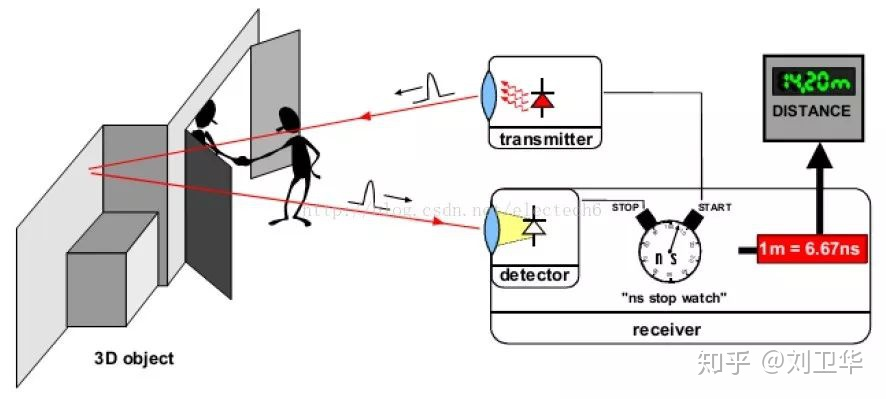
光飞行时间法(TOF),利用测量光飞行时间来取得距离,简单来说就是,发出一道经过处理的光,碰到物体以后会反射回来,捕捉来回的时间,因为已知光速和调制光的波长,所以能快速准确计算出到物体的距离。
TOF技术主要是为了实现3D成像而生,X,Y两维的手机拍照大家都非常熟悉了,TOF在其基础上增加了Z轴的深度信息。实现3D的其他方案还包括,散斑结构光、编码结构光、双目视觉以及双目结构光等,iPhoneX使用的就是散斑结构光方案,而 iPhoneXs同样采用了结构光方案。
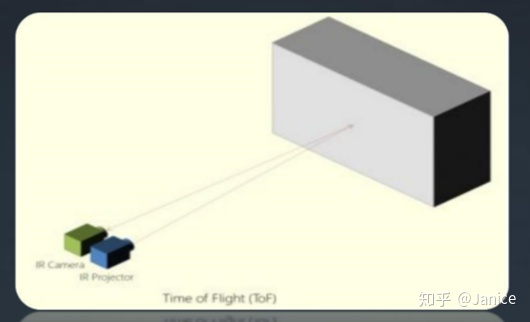
相对结构光方案,TOF的3D方案实现起来更为简单,主要包括投射器和接收模组,通过控制投射器发出经调制的近红外光波,遇物体后反射,接收模组计算发射光波和接收光波的时间差或相位差,换算成被拍摄景物的距离,以获取深度信息。


二、ToF
ToF(Time of Flight)飞行时间
字面理解就是通过光的飞行时间来计算距离
ToF的基本原理是通过红外发射器发射调制过的光脉冲,遇到物体反射后,用接收器接收反射回来的光脉冲,并根据光脉冲的往返时间计算与物体之间的距离。这种调制方式对发射器和接收器的要求较高,光速那么快,对于时间的测量有极高的精度要求。
TOF技术同结构光技术不同,TOF时间飞行法的原理是通过专用传感器,捕捉近红外光从发射到接收的飞行时间,判断并计算出物体的距离信息。其发射的是持续不断的“面光源”。光线遇到不可穿透物体会发生反射,利用这一原理,通过记录反射光达到接收器的时间,由于光速和光波长已知,理论上便能快速计算出光源与物体的距离,由此得到一张被测物体的3D图像。
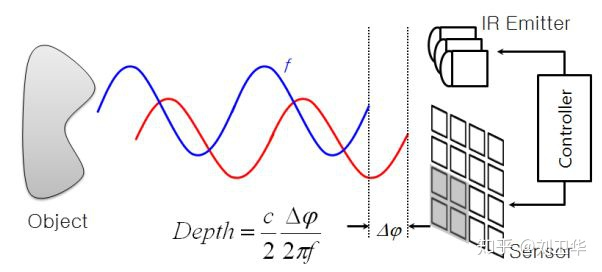
在实际应用中,通常调制成脉冲波(一般是正弦波),当遇到障碍物发生漫反射,再通过特制的CMOS传感器接收反射的正弦波,这时波形已经产生了相位偏移,通过相位偏移可以计算物体到深度相机的距离。
原理不复杂,但要实现较高的测量精度,并将发射接收模块小型化并不容易。
由于测量光的飞行时间需要非常高的频率和精度,早期的ToF设备在体积上一直存在问题,成本也高,所以多只用于工业领域。ToF的小型化极大依赖于近年来集成电路与传感器技术上的突破,使得在CMOS芯片上对光脉冲相位的测量逐渐变得可行。有芯片上的解决方案,才有小型化和低成本的产品出现。
据说目前最小的ToF模块IRSZ238XC,整个模块(包括传感器,镜头IR发射器及电路)尺寸为12mm×8mm。外形更小巧,拥有比以前芯片更高的分辨率,达38,000像素。

三、结构光
结构光 (Structured Light)
结构光是通过红外激光器,将具有一定结构特征的光线投射到被拍摄物体上,再由专门的红外摄像头进行采集反射的结构光图案,根据三角测量原理进行深度信息的计算。

简单来说就是通过近红外激光器,将具有一定结构特征的光线投射到被拍摄物体上,再由专门的红外摄像头进行采集。这种具备一定结构的光线,会因被摄物体的不同深度区域,而采集不同的图像相位信息,然后通过运算单元将这种结构的变化换算成深度信息,以此来获得三维结构。如下图:
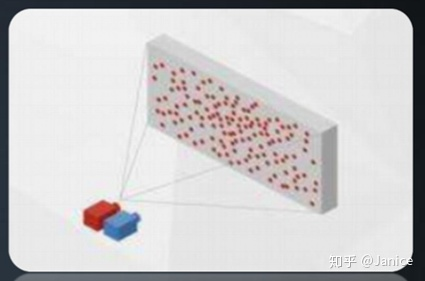
iPhoneX上的Truedepth相机,用的是以色列PrimeSense公司的Light Coding技术。这种结构光方案,通过投射人眼不可见的伪随机散斑红外光点到物体上,每个伪随机散斑光点和它周围一定范围内的点集在空间分布中的每个位置都是唯一的,并将预先进行了存储。
这些散斑投影在被观察物体上的大小和形状根据物体和相机的距离和方向而不同,由此计算深度信息。
投射的光点或图案在任意不同空间中是不相同的,如下图所示:

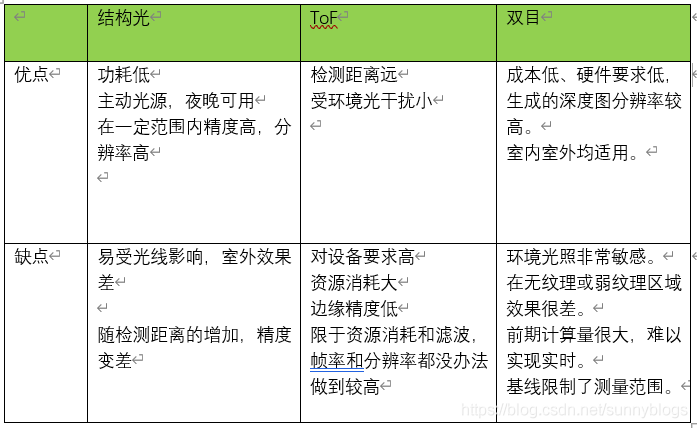
优缺点:
这种方案和ToF相比,计算量少功耗低,在近距离范围内精度更高,所以在人脸识别,手势识别方面极具优势。
当然,结构光的缺点也比较明显。由于投射的经过编码的图像或散斑光点,在室外容易被强自然光淹没,所以结构光方案在室外并不好用。当物体距离相机较远时,物体上投射到的图像或光点越大,精度也越差;它也容易受光滑平面的反光影响,比如投射到镜子上。
P.S. 想象一下手电筒,几万个点投射在你手上,和投射在10米远处的物体上,每个点覆盖的面积是不是放大了很多倍?精度就会自然降低很多。

说回ToF技术。相较之下,ToF设备要求发光器件与接收器件间尽可能接近,越接近,由于发射-接收路径不同所产生的误差就越小。因此,ToF技术更利于设备的小型化,对于手机或是AR产品实现轻便紧凑的外形非常重要。
而结构光一定程度上相反,结构光的精度和Baseline(投射器和接收模组的距离)关系非常大,Baseline间隔越长,精度就越高。常用的Baseline至少需要保证20mm以上。
从两种技术的对比上看,TOF技术虽然实时性好、算法简单,但存在传感器技术不成熟、图像分辨率低、成本高、功耗高等问题,目前其更多应用在物体测距等领域。3D结构光技术测量精度高,可以达到1mm(毫米级),拥有功耗相对较低等诸多优点,更适合用于近距离的人脸识别,在智能手机、刷脸支付等场景拥有巨大潜力,因此备受业界的重视。
posted on 2021-11-23 14:45 Sanny.Liu-CV&&ML 阅读(10120) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号