
ubuntu16.04下安装openMVG+openMVS +三维重建测试
环境配置:
linux下配置openMVG和openMVS进行三维重建比较简单;
openMVG只需要按照官方文档安装配置就行,主要需要注意的是一些环境或者工具的版本;官方链接:https://github.com/openMVG/openMVG/blob/master/BUILD.md#linux
openMVS的配置也跟openMVG差不多,主要需要注意的是第三行代码main_path=‘pwd’,这里的main_path是你vcglib文件夹所在目录文件;还有一个就是Eigen库的版本,一定是3.2.X,当时看得快;
环境测试:
按照https://github.com/cdcseacave/openMVS/wiki/Usage里给的Sceaux Castle图片集,先按照https://openmvg.readthedocs.io/en/latest/software/SfM/SfM/#进行SFM调试程序;
在后面进行MVS的测试是,需要把openMVS_build/bin的文件复制到linux下面/user/bin文件夹里面;才能运行MVS重建命令。
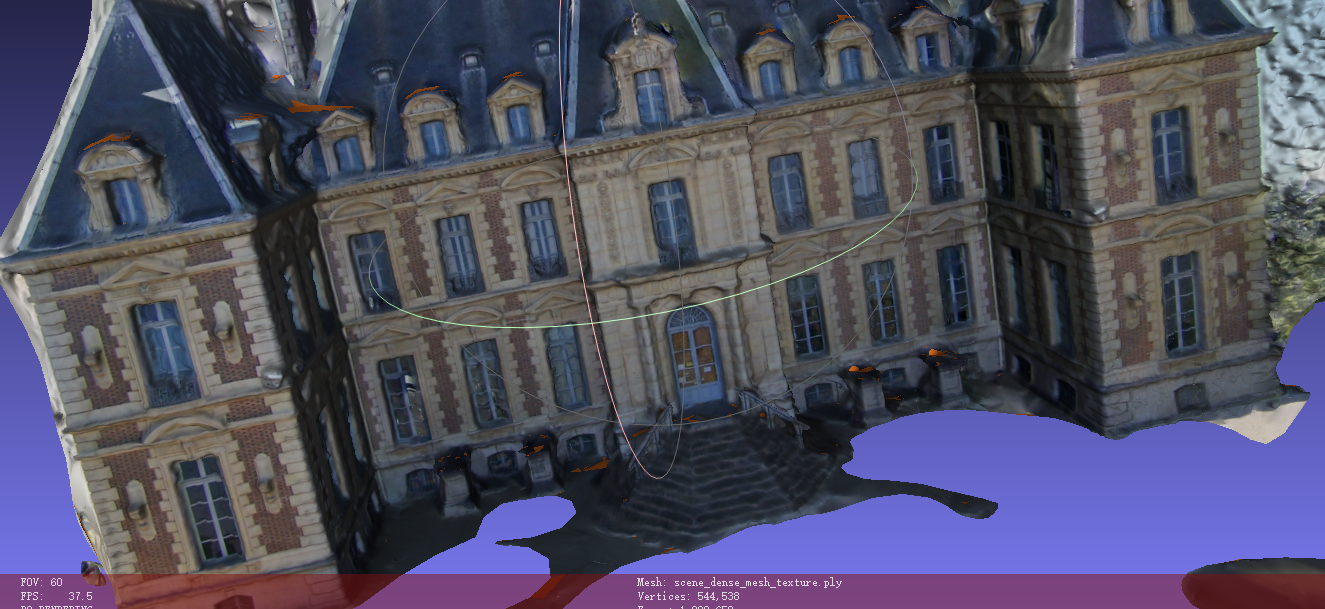
下面是使用官方的数据集重建出来的效果:
需要注意的是,在使用自己的数据集进行重建的时候,有时会遇到数据集的相机参数没在sensor_width_camera_database.txt文件里面,这就需要添加自己数据集的相机等参数,可以使用exiftool工具查看数据集的相机等参数,然后添加进文件里面。下面这两个github的讨论帖子提供解决方法:
https://github.com/openMVG/openMVG/issues/559
https://github.com/openMVG/openMVG/issues/1017
最后感谢这三篇博客:https://blog.csdn.net/X_kh_2001/article/details/83690094
https://blog.csdn.net/d401692632/article/details/82858830
https://blog.csdn.net/baidu_40840693/article/details/84777589

 浙公网安备 33010602011771号
浙公网安备 33010602011771号