GNSS 坐标系之间的转换
齐次坐标
其实对于齐次坐标的含义从来没认真想过,好像一直都是在坐标上加个1,多一个维度就是齐次坐标了。
这里希望有时间对齐次坐标深入了解下。2021-11-01 17:26:35 星期一
坐标系转换
坐标系转换最开始应该是在大二计算机图形学时学到的。当时应该是从二维的情况下推倒的,记得没错应该是齐次坐标。
首先从wikipedia学下。旋转矩阵-wikipedia
旋转矩阵在维基的定义是:
旋转矩阵(英语:Rotation matrix)是在乘以一个向量的时候有改变向量的方向但不改变大小的效果并保持了手性的矩阵。旋转矩阵不包括点反演,点反演可以改变手性,也就是把右手坐标系改变成左手坐标系或反之。所有旋转加上反演形成了正交矩阵的集合。旋转可分为主动旋转与被动旋转。主动旋转是指将向量逆时针围绕旋转轴所做出的旋转。被动旋转是对坐标轴本身进行的逆时针旋转,它相当于主动旋转的逆操作。
定义中几个名词第一次看见:
- 手性
- 点反演
- 主动/被动旋转
从矩阵理论的角度考察旋转矩阵
旋转矩阵必为正交矩阵。
一个认知:转换前的坐标系中两个向量在转换后的坐标系中的内积是不变的。该认知应该反映了矩阵的正交的内积不变的特点。即:\(<x,y>=<Tx,Ty>\)。
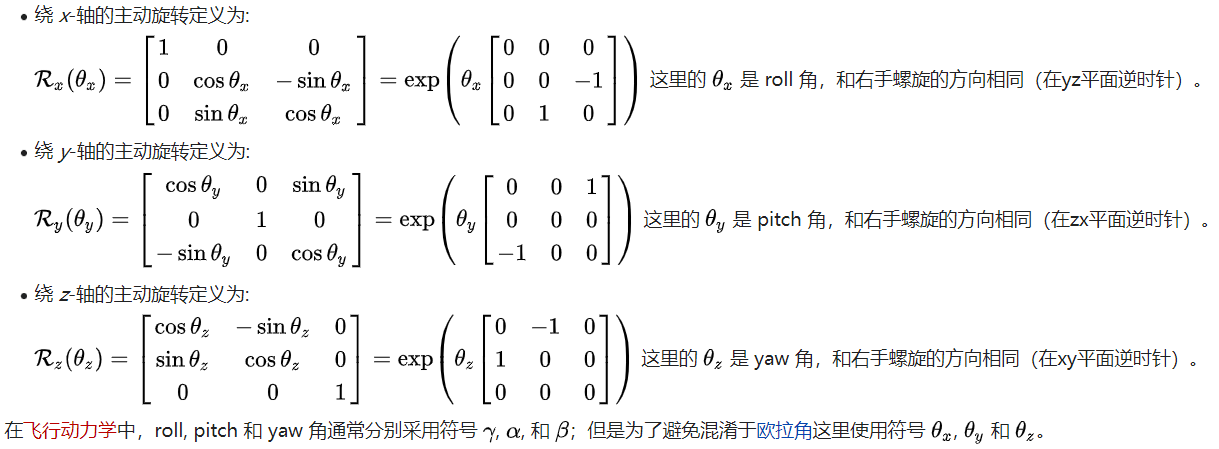
三维情况下的旋转矩阵

 浙公网安备 33010602011771号
浙公网安备 33010602011771号